调车作业分散自律控制系统的研究
2014-10-10宋宗莹王建英
宋宗莹, 王建英
(1.神华集团有限责任公司 运输管理部,北京 100011;2.中国铁道科学研究院 通信信号研究所,北京 100081)
调车作业分散自律控制系统的研究
宋宗莹1, 王建英2
(1.神华集团有限责任公司 运输管理部,北京 100011;2.中国铁道科学研究院 通信信号研究所,北京 100081)
通过分析我国铁路车站调车作业流程,提出调车作业分散自律控制系统模型,指出其实质就是将车站值班员的经验、知识和各种规章制度进行计算机形式化描述。通过空间冲突法和时间冲突法对列调车作业相互干扰问题进行智能疏解,得到列车进路指令序列和调车进路指令序列。根据实际列车运行位置、调车作业申请和当前时刻,自动匹配进路指令序列,生成列车进路命令序列和调车进路命令序列,自动下达车站联锁系统执行。采用多智能体技术和面向服务技术构建车站分散自律控制逻辑单元,实现调车作业以车站为自治域的分散自律控制。
分散自律控制系统;调车作业; 调度集中; 多智能体
multi-agent
目前我国铁路沿线车站的调车作业由车站统一协调管理,保证按照调度所的要求及时准确完成调车作业,实现车流挂线。无论大型车站还是中间站,其调车作业工程的实质基本一致,即车站调度员(值班员)按照调度所调度员下达的列车调整计划、装卸车计划、摘挂列车作业计划、机车交路计划等为依据,结合当前车站实际情况,编制车站调度作业计划,适时办理调车进路,指挥调车作业人员按计划完成调车作业。
车站调车作业的基本依据是《车站作业细则(简称站细)》,核心是调车作业不得影响列车作业,如果列调车作业在空间上无法隔开,则调车作业应在车站接发列车作业间隙进行,其业务流程如图1所示。
车站作业调度自动化研究的核心就是将图1中值班员的知识和经验,通过提炼、分析和综合,形成计算机能够识别的形式化语言,为实现调车作业分散自律控制系统提供基础保障,其实质就是通过综合应用计算机软硬件技术、职能控制技术、通信信号技术,研究调车作业计划计算机辅助编制、调车钩计划自动生成和调车进路自动办理等技术原理和实现方式,为车站调车作业提供高效、安全和可靠的技术支撑,进而实现车站调车作业和列车作业的有机协调,提高车站作业效率和安全度。

图1 调车作业流程及其抽象示意图
1 主要模型和关键算法
1.1 基本定义
定义1:进路元素集合是指构成车站站场的各种信号元素的抽象集合,是道岔、信号机、轨道区段以及接近离去区段、股道的抽象表示集合,记为:的调整计划,记为:


其中,Noi为第i列车车次号;
tbi为第i列车在指定车站的到达时刻;
tei为第i列车在指定车站的出发时刻;
gi为第i列车在指定车站的停车股道;
di为第i列车在指定车站的运行方向;
ki为第i列车的属性,例如,通过客车、到开客车、货车、超限列车等。
定义4:列车进路集合指指定车站可供列车运行的径路集合,记为:
RL={rli}, i=1, 2, 3,…, m ,其中,rli为列车进路。
定义5:列车进路是指该站单条列车进路,记为:

其中,gi为第i条列车进路对应的接发车股道;
di为第i条列车进路的接发车方向;
eij为组成第i条列车进路的进路元素;
rdq为禁止办理的调车进路集合,是调车进路集合RD的子集。

ebi为第i钩调车作业起始位置所对应的进路元素;
eei为第i钩调车作业终止位置所对应的进路元素。
定义9:调车进路集合是指指定车站可供调车车列运行的径路,记为:

定义10:调车进路是指该站单条调车进路,记为:

其中,ebi为第i条调车进路起始位置所对应的进路元素;
eei为第i条调车进路终止位置所对应的进路元素;
eij为组成第i条调车进路的进路元素;
rlk为禁止办理的列车进路集合,是列车进路集合RL的子集;
c为纯调车进路属性,c=1表示独立调车进路,与任何列车进路无关;
其中, tsi为第i钩调车作业进路占用时分。
1.2 车站列调车计划时序队列求解算法
车站列车、调车计划时序队列的形成主要有两个关键算法:(1)空间冲突判决法;(2)时间冲突判决法。
将接收到的列车作业计划和调车作业计划进行空间冲突判决。如果空间不冲突,则调车作业计划随时执行;如果空间冲突,再进行时间冲突判决。
1.2.1 空间冲突判决法
依据调车钩计划si生成调车进路rdi,进行如下判断:
(1)若对应的rdi中属性值c=1,则为纯调车进路,与任何列车进路都不冲突,只要调车作业需要,可立即办理;
(2)若对应的rdi中属性值c≠1,则为该调车进路和列车进路存在共用进路元素E的情况,必须进行时间冲突判别。
1.2.2 时间冲突判决法
依据单列车计划pi生成的列车进路rli和调车钩计划si生成调车进路rdi(此时c≠1),以及当前时刻tcur,对rli所有进路元素属性elij和rdi所有进路元素edij进行如下判断:
(1)若tbiΔ≤tcur+tsj≤teijΔ,且edij=elij,则表示当前时间段列车进路rli和调车进路rdi争用同一进路元素,存在交叉转(5);
(2)若tbiΔ≤tcur≤teijΔ,且edij=elij,则表示当前时间段列车进路rli和调车进路rdi争用同一进路元素,存在交叉转(5);
(3)若tcur+tsj<tbiΔ,且edij=elij,则表示当前时间段列车进路rli和调车进路rdi不存在交叉,即列车作业间隔满足调车作业钩时分tsj的要求,设置该调车钩计划si和调车进路rdi的属性值tci=tcur,及edij=1;取下一个调车钩计划sj及其对应的调车进路rdj转(1)进行判决,直到所有调车钩计划 S找到合理的开始作业时间;
(4)若tcur>teijΔ,且edij=elij,则选取下一条单列车计划pj及其对应的列车进路rlj转(1)进行判断,直到遍历完所有的列车计划P,找到合理的调车作业开始时间;
(5)令tcur=tcur+teijΔ,即调整当前时刻向后推迟,选取下一条单列车计划pj及其对应的列车进路rlj转(1)进行判断,直到遍历完所有的列车计划P,找到合理的调车作业开始时间;
(6)若edij≠elij,即调车进路rdi和列车进路rli不存在交叉,则选取下一条单列车计划pj及其对应的列车进路rlj进行判断,直到遍历完所有的列车计划P,如果所有的列车进路和当前的调车进路都不存在争用进路元素的情况,则,设置该调车钩计划si和调车进路rdi的属性值tci=tcur,及edij=1;否则转(1),继续判断。
1.2.3 算法流程
调车作业分散自律控制算法主要由列车计划进路指令序列化、调车作业计划进路指令序列化、列车进路自动办理及调车进路自动办理组成。
列车计划进路指令序列化是指将该站接收到的列车运行调整计划P逐条与列车进路集合RL进行匹配,得到每条计划对应的列车进路,并将对应的进路元素征用属性和起始结束时间按列车运行计划规定的时间进行设置而形成的待执行的指令序列,记为:

其中,qli={pi, rlu, ωlv, tlv, flv} 为单条列车计划进路指令;
rlu为单条列车运行计划pi匹配成功的唯一列车进路,是一个确定的值;
wlv={Nov, kv, gv, dv, evj} (v=1, 2, …, a; j=1, 2,…, c)为预设的不同列车种类进路办理位置,根据“车站作业细则”相关规定预先定义,通常为车站接近离去区段和区间闭塞分区的组合,记其全集为 WL。

调车作业计划进路指令序列化是指将该站编制的调车作业计划S逐条与列车进路集合RD进行匹配,得到每条调车钩计划对应的调车进路,并通过时间和空间冲突法判别后,得到该调车钩计划可以办理的起始时刻,同时设置对应的进路元素征用属性和起始结束时间而形成的待执行的指令序列,记为:

其中,qdj={sj, rdu, fdv} 为单条调车作业计划进路指令;
rdu为单条调车计划sj对应的唯一调车进路,是一个确定的值。
fdv为该条调车计划sj对应的触发办理条件,符合该条件时自动触发办理。其值根据当前时刻、调车钩允许开始作业时刻和人工申请调车作业开始命令自动计算,周期性更新,是一个动态变化的值,取值为:
列车进路自动办理是指逐一判断列车进路指令集合QL的每一条进路指令qli,当满足触发条件flv时,将进路指令转化为底层执行设备可识别的命令,进行“车站作业细则”相关约束条件和车站信号联锁关系约束条件检查后,自动办理列车接发车进路的过程。
调车进路自动办理是指逐一判断调车进路指令集合QD的每一条进路指令qdj,当满足触发条件fdv时,将进路指令转化为底层执行设备可识别的命令,进行“车站作业细则”相关约束条件和车站信号联锁关系约束条件检查后,自动办理车站调车进路的过程。
调车作业分散自律控制算法流程如下所述:
(1)接收列车运行计划,形成列车计划进路指令序列QL。
以pi中的{gi, di}为匹配特征,依次遍历列车进路集合RL。若第u条进路rlu的{gu, du}满足gi=gu且di=du,则匹配成功,即计划pi对应的列车进路为rlu。同时以pi中的{Noi, ki, di, gi}为判别元素,依次遍历触发条件集合WL和TL。若第v个集合元素{Nov, kv, dv, gv}满足Noi=Nov且ki=kv,di=dv,gi=gv,则匹配成功,最后设置pi对应的列车进路指令qli中的各元素,flv由计算得到,并保存到队列QL中。
(2)接收调车作业计划,形成调车作业进路指令序列QD。
以sj中的{ebj, eej}匹配特征,依次遍历调车进路集合RD。若第u条进路rdu的{ebu, eeu}满足ebj=ebu且eej=eeu,则匹配成功,即计划sj对应的列车进路为rdu。同时以rdu、sj和列车计划P中的每条列车计划进行空间和冲突判别处理,得到每个rdu对应的单钩调车计划允许开始作业的时刻tcu,最后设置sj对应的调车进路指令qdj中的各元素,fdv由计算得到,并保存到队列QD中。
(3)循环判断QL中的所有指令qli,计算其对应的符合触发条件flv的值。若flv≠0,则立即执行该指令,自动办理列车接发车进路;否则继续等待。
(4)循环判断QD中的所有指令qdj,计算其对应的符合触发条件fdv的值。若fdv≠0,则立即执行该指令,自动办理调车进路;否则继续等待。
2 分散自律调车控制逻辑单元
以车站为一个自治域,以多智能体理论作为基础,构建车站建立分散自律控制逻辑单元,如图2所示,划分为通信层、控制层和功能实现层。
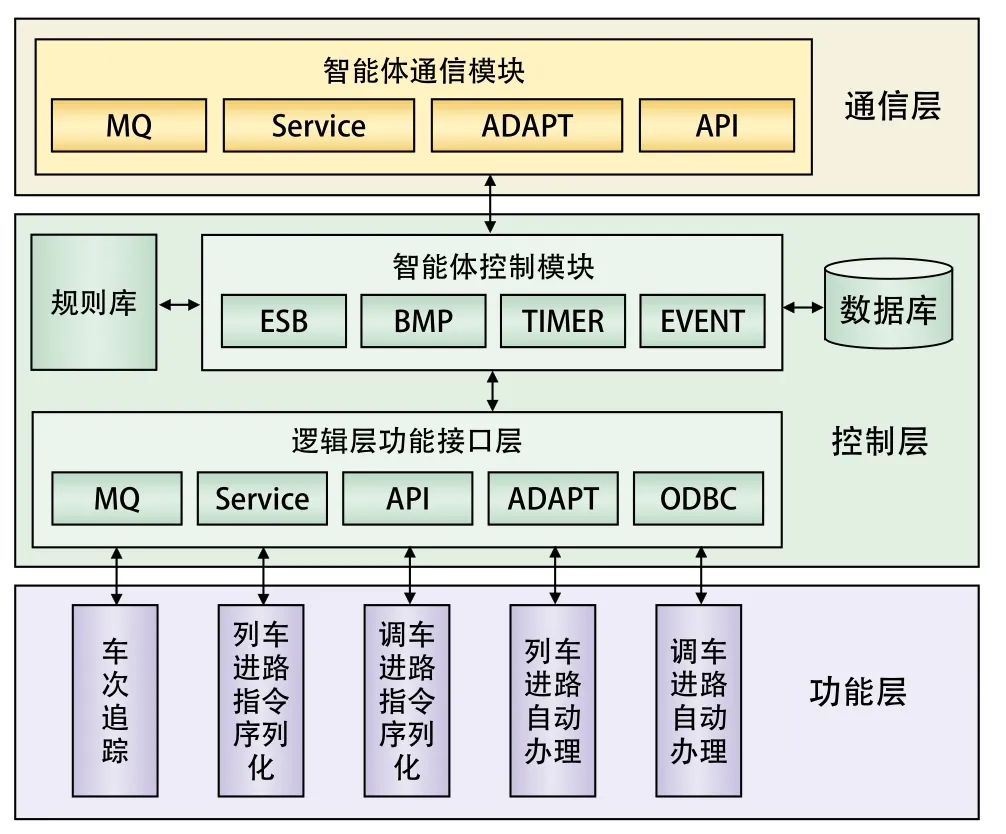
图2 分散自律控制逻辑单元示意图
通信层主要完成与相邻车站、调度中心分散自律控制逻辑单元之间的信息交换,与车站联锁、列控等车站信号系统之间的信息交换,提供消息队列(MQ)、服务调用(Service)、远程函数调用(API)和多种适配器方式(Adapt),实现数据的高效、可靠和安全交换。
控制层主要功能是根据业务流程和数据处理流程,通过合理调配各种基础数据、处理规则和具体业务任务模块,自动、高效、实时、安全和可靠实现调车作业的分散自律控制。控制层根据通信层传递的不同信息和用户需求,采用企业服务总线(ESB)、业务流程总线(BPM)、定时器触发和事件触发等方式,通过提供消息队列(MQ)、服务调用(Service)、远程函数调用(API)、多种适配器(Adapt)和数据库访问(ODBC)等方式调用功能层的具体任务模块,协调一致地实现车站调车作业的分散自律控制。
功能实现层由多个独立的任务模块组成,主要包括车次号自动追踪、列车计划进路指令序列化、调车作业计划进路指令序列化、列车进路自动办理及调车进路自动办理等任务模块,功能层根据任务的实时性、数据量、安全性等要求,分类设计与控制层、规则库和数据库的信息交换和调用方式,保证车站分散自律控制逻辑单元的安全、可靠和高效运转。
规则库中主要保存“技规”、“行规”、“调规”、“站细”和通信信号系统技术条件股道应用规则、列调车进路办理限制条件、接发列车作业规则、调车作业规则、信联闭系统相关的列调车作业限制规则以及业务流程规则等形式化数据。
3 结束语
本文所述的车站分散自律控制逻辑单元已在FZy-CTC分散自律调度集中系统工程投入实际应用,取得了预期的效果,主要结论如下:
(1)按空间冲突判别法和时间冲突判别法建立列车和调车进路控制指令是有效的,能够满足现场实际调车作业的需求。
(2)列车和调车进路命令自动触发办理算法能够满足现场实际需要,自动办理成功率达95%以上,极大地减轻了车务人员的劳动强度,提高了作业效率。
(3)采用多智能体技术构建车站调车作业分散自律逻辑控制单元,功能实用,架构可行、可靠,能够适应车站调车作业分散自律控制的需要。
[1]中华人民共和国铁道部. 分散自律调度集中系统(CTC)技术条件[S].2008,8.
[2]黄 溢,邓煜阳. CTC条件下的车站调车作业优化研究[J].交通与运输,2008(5).
[3]刘朝英,李 萍.中国铁路分散自律调度集中系统[M].北京:中国铁道出版社,2009.
[4]李 焱,林 磊,陈德旺.面向构件的可复用列控中心研究[J].铁路计算机应用,2012,21(12).
责任编辑 杨利明
Research on Decentralized Autonomous Control System for shunting operation
SONG Zongying1, WANG Jianying2
( 1. Department of Transportation Management, Shenhua Group Corporation Limited, Beijing 100011, China;
2. Signal & Communication Research Institute, China Academy of Railway Sciences, Beijing 100081, China )
This paper proposed a new model of Decentralized Autonomous Control System for the shunting operation. The essence of this model was to describe the knowledge, the experience of the station attendant and the associated regulation by the computer language, and resolve the interference between the train and the shunting operation using the time clash method and space clash method based on the multi-agent logical control unit of decentralized autonomous. The whole work could be described as the follow three steps, it was firstly constructed the orders of the train route and the shunting route, and then automatically checked the train position, the shunting operation and its application processing time to generate the final route orders, finally transmitted these orders to the station interlocking system to execute.
Decentralized Autonomous Control System; shunting operation; centralized traffic control;
U292.2∶TP39
A
2013-10-11
宋宗莹,助理研究员;王建英,研究员。
1005-8451(2014)01-0022-05