基于多传感器信息融合的列车定位方法研究
2014-10-10康随武刘晓娟
康随武,刘晓娟
(兰州交通大学 电子与信息工程学院,兰州 730070)
基于多传感器信息融合的列车定位方法研究
康随武,刘晓娟
(兰州交通大学 电子与信息工程学院,兰州 730070)
针对城市轨道交通中列车定位问题,提出了一种基于联邦卡尔曼滤波器的多传感器信息融合列车定位方法,建立了GPS/IPS/DR信息融合模型,对GPS/IPS/DR组合的信息融合定位进行了MATLAB仿真,结果表明,GPS/IPS/DR融合定位能提高列车的定位精度和可靠度,能很好的抑制传统列车定位中的积累误差。
列车定位;多传感器信息融合;联邦卡尔曼滤波器;定位精度
列车定位技术在整个列车控制系统以及列车运行中起着很重要的作用,随着基于通信的列车控制系统(CBTC)在我国城市轨道交通中的中广泛应用,对列车定位精度提出了更高的要求,实时、准确地获得列车的速度和位置信息是保证列车安全、高效运行的关键因素,影响列车定位精度的重要原因是车辆采用的传感器和定位机理。
传统定位中采用单一传感器进行测量和计算,测速误差随时间不断累积,很难获得持续、高精度的列车位置和速度信息,只能保证短时间的定位精度,因此,有必要研究一种以多传感器融合技术为基础的定位方法,通过信息冗余互补提供更加可靠、精确的位置信息,这种融合技术的实现需要在融合算法的基础上才能完成。
传统的融合算法采用的是基于卡尔曼滤波理论的状态估计算法,卡尔曼滤波器适合动态测量,因此在列车测速定位中有很好的应用,到1988年,Carlson在卡尔曼滤波的基础上又提出了联邦卡尔曼滤波算法,相对而言,联邦卡尔曼滤波器最大的特点是它属于分块估计的分布式滤波器,采用方差上界消除技术和统一信息分配原则,对多传感器组合系统实现信息融合,实现系统整体状态的最优估计[1],这种滤波结构不仅容错结构好、计算速度快、而且信息分配十分灵活,因此在城市轨道交通智能控制系统的研究中受到了许多学者的青睐。
1 联邦卡尔曼滤波
1.1 基本原理
联邦卡尔曼滤波器的结构通常为分布式融合系统结构,是一种具有两级滤波结构的分散化滤波方法[2],如图1所示,它由参考系统、主滤波、若干个子滤波器组成。
其中,每个子滤波器分别独立地进行时间更新和测量更新,而主滤波器则只进行时间更新,并且融合各子滤波器的测量结果,参考系统是整个测量系统的重要组成部分,其输出一方面给各子滤波器作为测量值输入,得出各个子滤波器的局部估计值xi及其协方差阵pi,另一方面直接送到主滤波器进行估计,把得出的子滤波器的局部估计值和主滤波器的估计值进行融合处理,最后输出全局估计和Pg对应的协方差阵 。
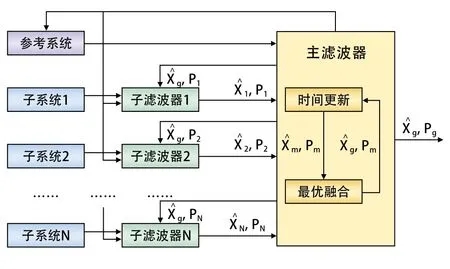
图1 联邦卡尔曼滤波器的结构
联邦卡尔曼滤波器中子滤波器估计均方误差阵和子滤波器的状态量可以进行重置,重置过程中信息因子的分配方法也有许多,因此可以构造多种滤波结构,联邦卡尔曼滤波器正是利用这种信息分配原理把被测系统的动态信息分配到各子滤波器与主滤波器中,使得各个子系统之间相互独立,然后进行信息的最优融合估计,最终得出整个系统的最优解。
1.2 联邦卡尔曼滤波系统模型

设任意离散系统的状态方程为:(1)式中X(k+1)是系统的状态向量,W(k)是系统的动态噪声,是零均值白噪声,Φ(k+1/k)为系统的状态转移矩阵,Γ(k+1/k)是系统的噪声转移矩阵。
系统的测量方程:
当有N个子滤波器对系统进行独立的测量时,任意一个子滤波器的测量方程为:

(2)式中Z(i)k是第i个传感器的量测值,V(i)k是第i个传感器的量测噪声,属于零均值白噪声,H(i)k为第i个传感器的量测矩阵。
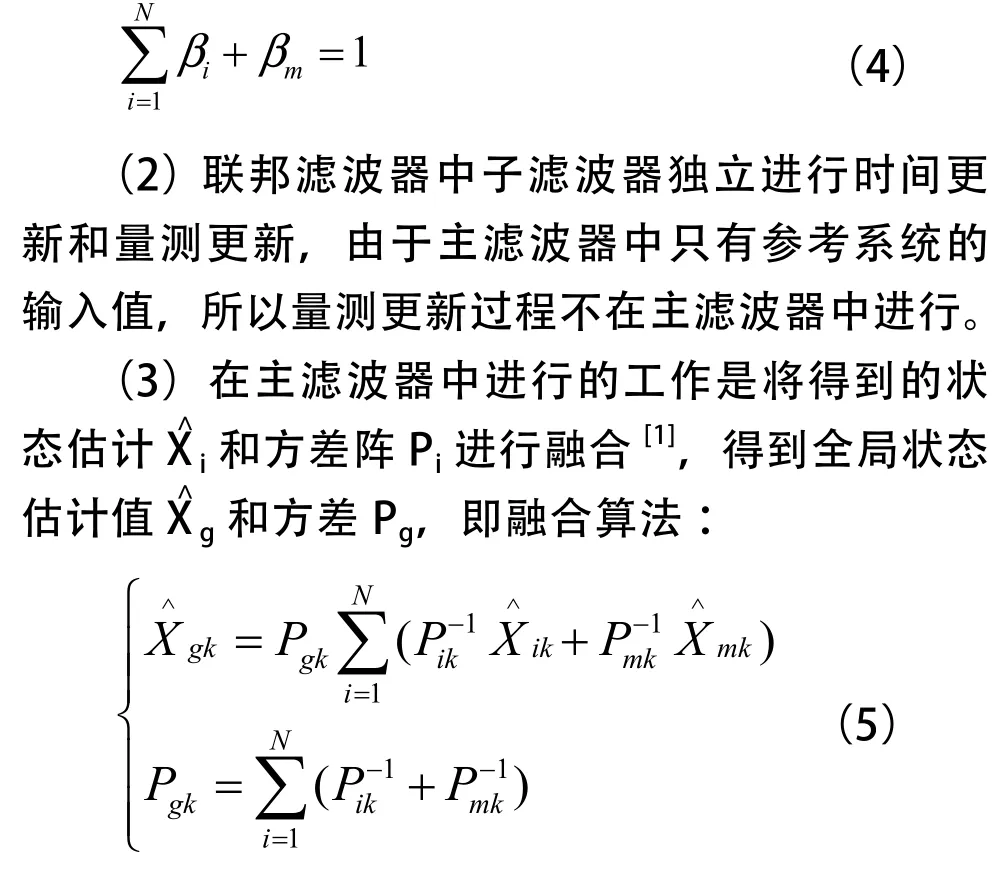
1.3 联邦卡尔曼滤波器融合算法
(1)联邦卡尔曼滤波器采用信息分配原理取消各个子滤波器之间的相关性,即:

其中Bi为信息分配因子,Qi为第i个子系统的噪声,满足信息守恒原理,即:
2 多传感器信息融合测速定位系统模型的建立
目前,已有的融合测速定位系统组合模型有:GPS/IPS组合、DR/Balise组合、多普勒雷达与GPS组合、GPS/IPS/多普勒雷达/速度传感器组合等组合方式,这些组合方式由于既有互补,又有冗余,明显具有较高的可靠性,当其中一个有故障时,系统可以降级使用,但只有采用合理的融合算法与融合结构才能获得好的结果[2],实际应用中合理的选取多个传感器作为信息融合的对象显得尤为重要,因为不同的传感器具有不同的特征,误差来源也不同,所以需要将其进行优化配置,利用优势互补来降低定位误差,从而获得更为全面、可靠的定位结果。
2.1 信息融合传感器的选择
本文中选取列车定位系统(GPS,Global Positioning system)、航位推算系统定位(DR,Dead Reckoning)、惯性列车定位,(IPS,Inertial Positioning System)系统作为信息融合对象,建立GPS/IPS/DR信息融合的组合定位模型,原因是GPS/IPS/DR融合结构利用GPS的长期稳定性与适中精度,来弥补IPS的误差随时间传播或增大的缺点,利用IPS的短期高精度来弥补GPS接收机在受干扰时误差增大或遮挡时丢失信号,DR系统的优势在于其成本较低,而且在有限的时间内提供较高精度的车辆实时定位信息[3],可以作为GPS/IPS的辅助定位方式,三者的结合能够使得定位系统的成本下降。GPS、DR和IPS各有优势,定位误差来源各不相同,所以可以将它们组合起来,优势互补,提高整个系统的定位精度、容错性和可靠性。
2.2 GPS/DR/IPS融合结构
采用GPS/DR/IPS信息融合系统,设计联邦卡尔曼滤波器,其结构如图2所示。

图2 GPS/IPS/DR融合结构
系统中选取IPS作为参考系统,而GPS、DR作为子系统,其原因是由于IPS无论是在工作的独立性、还是适应性都比GPS、DR有绝对的优势。(1)从工作原理上讲,IPS根据惯性原理工作,而惯性是任何物体的固有属性,它不以外部环境的改变而改变,所以IPS工作的独立性很强,仅靠系统本身就能在全天候条件下,在全球范围内和任何介质环境里自主、隐蔽的进行连续的三维空间定位,能够提供反映运动体运动状态的完整信息,独立自主的提供最全面的导航参数[2];(2)从对环境的适应性来讲,IPS适应性强很强;具有极宽的频带,能够跟踪和反映运动体的任何机动运动,并且对磁、电、光、热及核辐射等形成的波、场、线的影响都不敏感,有极强的抗干扰能力。
2.3 GPS/DR/IPS融合结构的数学模型
设被测列车在区间运行,其状态方程为:

式中:e, n, ve, vn, ae, an, εe, εn分别为被测车辆东向、北向的位移量、速度、加速度,εe, εn是偏离两个坐标轴方向的误差量。
整个融合系统的状态方程为:

观测方程为:

当i=1时,指GPS子系统,其观测量通常是列车东向位置e和北向位置n(东向坐标与北向坐标)[4][5],其中:

上式观测噪声V(1)k+1中ue(k+1)和un(k+1)分别是GPS在定位过程中的东向和北向误差,其观测噪声协方差阵为R(1)k+1。
当i=2时,指DR子系统,其观测量为陀螺的角速度ω和系统在采样周期T内里程表显示的车辆行驶距离S,其中:

观测噪声V(2)k+1中us(k+1)和uw(k+1)分别指DR系统定位过程中里程表的误差和陀螺的漂移量的误差,R(2)k+1是DR系统V(2)k+1的协方差阵。
当i=3时指IPS子系统,其观测量为列车加速度a,系统连续积分后得到的经度l、纬度λ、和高度h,其中:

上式中ua(k+1), ul(k+1), uλ(k+1), uh(k+1)分别是IPS定位时加速度偏置量误差、系统输出纬度、经度、高程误差,该系统观测噪声协方差阵为R(3)k+1。
得到上述子系统的观测噪声阵和协方差阵后,GPS/DR/IPS子滤波器再进行时间更新以随时通过测量传感器获取最新数据,在此基础上再进行量测更新,从而得到GPS子系统和DR子系统的状态估计X^i和方差阵 Pi(i=1、2),然后根据上文中所讲到的融合算法将IPS、GPS、DR子系统的输出与主滤波器进行融合,得到GPS/DR/IPS的全局状态估计值X^g和方差Pg,最后通过信息分配原则,进行上述过程的循环运算。
3 仿真试验与分析
本文基于MATLAB仿真平台,对所提出的基于联邦卡尔曼滤波器的GPS/DR/IPS融合定位方法进行了仿真试验[6~7],试验分别用DR、GPS、IPS数据单独滤波,GPS/DR/IPS融合滤波这2种方法分别对运行车辆进行定位,比较2种方法的列车定位精度,采样周期取T=1 s,仿真时长为200 s,仿真中为了对实际IPS定位系统误差进行简化,假设列车所行使的轨道在一定时间内是平坦的且初始位置一定,说明与IPS定位系统相关的列车纬度、经度、高度误差均可忽略不计,设该列车以东向75 km/h速度匀速行驶,GPS单独定位时接收机位置误差均方差为8 m,速度误差均方差为0.3 m/s,DR系统单独定位时陀螺仪漂移均方差为0.2。/h,里程表输出误差取0.1 m,IPS单独定位时加速度偏置量取10-3g。
图3为所得到的定位误差曲线,从仿真结果可见,采用基于联邦滤波器的GPS/DR/IPS融合定位方法后,车辆定位精度比其各自单独定位时有明显改进,GPS/DR/IPS组合导航显著的抑制了IPS的输出误差随时间明显发散的趋势,改善了各自单独定位出现的误差积累,提高了定位精度和整个系统对的容错性与可靠性。
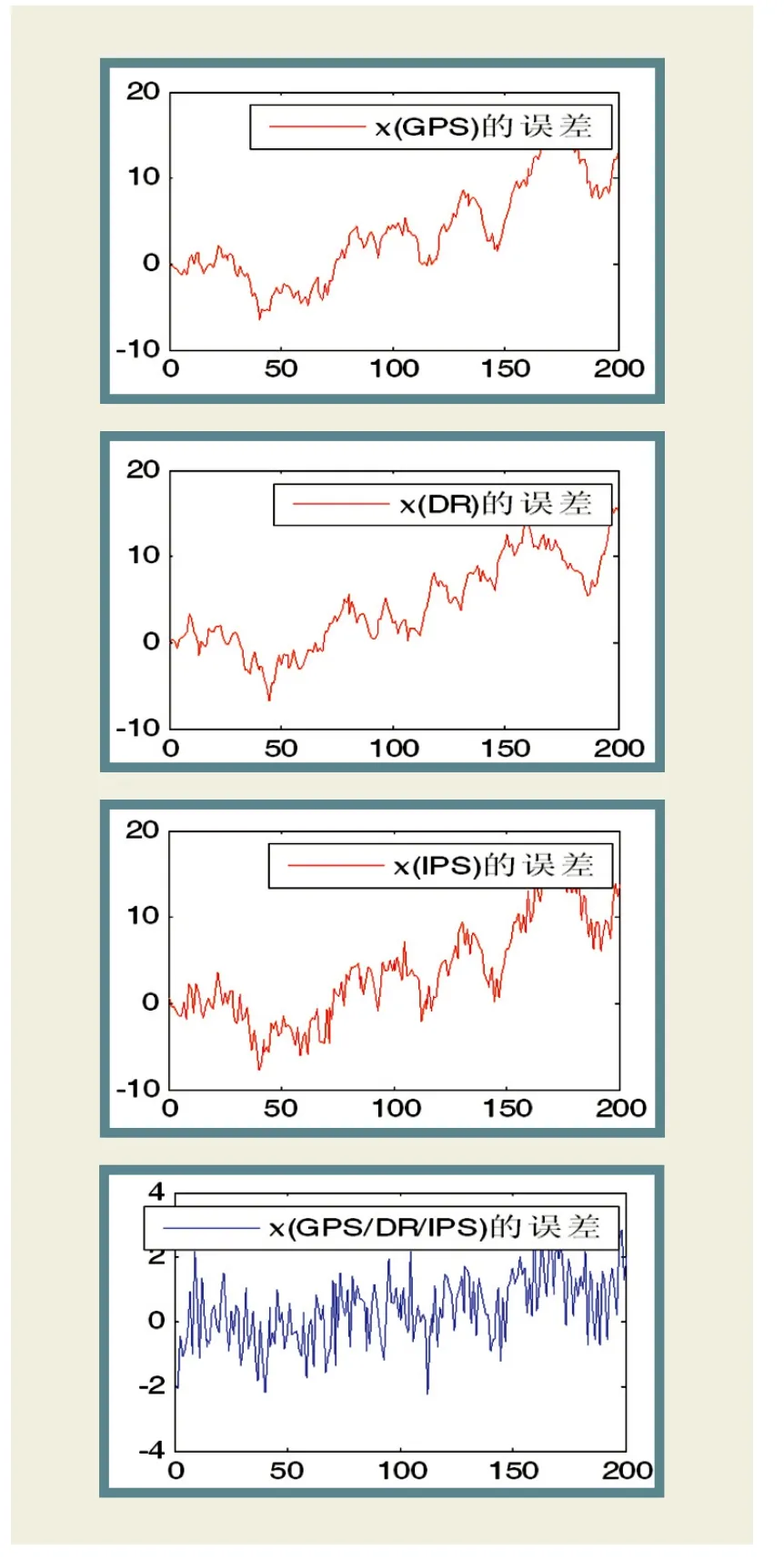
图3 定位误差比较图
4 结束语
本文研究了以多传感器信息融合技术为基础的列车定位方法,建立了联邦卡尔曼滤波的GPS/ IPS/DR组合模型,并通过MATLAB仿真平台进行了验证,结果表明了GPS/IPS/DR融合测速定位的可行性,保证了列车定位误差不随时间增长而积累,有效地提高了城市轨道交通列车定位的精度和定位系统的可靠性。
[1]阎树田,曹长虹.多传感器信息融合的列车定位方法研究[J].机械与电子,2011(4):19-22.
[2]朱 虹,关桂霞,关 永.基于联邦卡尔漫滤波器的车载GPS/DR信息融合[J].计算机工程与设计,2008,29(20):5357-5359.
[3]刘晓娟,张雁鹏,汤自安.城市轨道交通智能控制系统[M].北京:中国铁道出版社,2008.
[4]张 洋,周达天,刘宏杰,刘 波.基于多传感器融合的列车测速定位方法[J].都市快轨交通,2011,24(4):30-32.
[5]严建鹏,陈小强,侯 涛.基于改进联合卡尔曼滤波算法的列车测速信息融合[J]. 铁道科学与工程学报,2012,9(2):89-93.
[6]唐向宏,岳恒立,郑雪峰.MATLAB及在电子信息类课程中的应用[M].北京:电子工业出版社,2005.
[7]冯 刚,吕茂天,覃 天.基于MATLAB的卡尔曼滤波仿真研究[J].计算机科学与技术,2011,29(6):61-63.
[8]Bin Ling,Xiaoyan Yu,Lichen Liu. THE INFORMATION FUSION OF BASED ON FEDERATED KALMAN FILTER AND NEURAL NETWORKS[J]. 2010 International conference on computational and information science,2010,PP. 1099-1102.
[9]Hongwu Cao,Renhao Zhou,JianLiang Hao.An Introduction of Multisensor Optimal Information Fusion Based on Kalman Filter Method[J]. 2011 International Conference on Electronic & Mechanical Engineering and Information Technology,2011,PP. 3272-3276.
[10]刘 锋.基于通信的列车控制模式下的列车定位新技术[J]. 城市轨道交通研究,2012(4):48-53.
责任编辑 徐侃春
Research on train location method based on multi-sensor information fusion
KANG Suiwu, LIU Xiaojuan
( School of Electronics and Information Engineering, Lanzhou Jiaotong University, Lanzhou 730070, China )
Due to the problem of train location in Urban Transit, a kind of train locating method of multisensor information fusion based on Federal Kalman Filter was proposed, GPS/IPS/DR information fusion model was established. The train location of information fusion of GPS/IPS/DR was simulated by MATLAB. The simulating results showed that GPS/IPS/DR integration could improve the accuracy and reliability of train location, restrain the error accumulation of traditional location method.
train location; multi-sensor information fusion; Federal Kalman Filter; location accuracy
U284∶TP39
A
1005-8451(2014)01-0014-04
2013-08-08
康随武,在读硕士研究生;刘晓娟,教授。