基于ANSYS Workbench 的外骨骼膝关节机构优化设计
2014-10-10张万青葛文庆赵彦峻
张万青,葛文庆,王 滢,赵彦峻
ZHANG Wan-qing, GE Wen-qing, WANG Ying, ZHAO Yan-jun
(山东理工大学 机械工程学院,淄博 255000)
0 引言
穿戴式外骨骼是一种可以穿戴在人体身体外部的机械机构,它可以给穿戴外骨骼的人提供支持,保护,增强其运动能力,还能够在操作者的控制下完成一定的功能和任务。它能够和人一起行走,并且承担人背负的绝大部分的负重[1,2]。这种外骨骼依靠人的运动信息来控制机器人,通过机器人来完成仅靠人体自身能力无法淡定完成的运行、负重等任务。该装置可以让使用者使用很少的力量便可以担起相当沉重的货物,由于使用者不需要额外的消耗自身的能量便可以完成运输任务,大大提高了使用者的工作效率。穿戴式外骨骼的大腿,小腿和液压缸组成一个三铰点连杆机构,是整个承载系统的核心,三铰点连杆机构设计的优劣,决定着液压缸行程的长短和缸径的大小,直接影响大腿和小腿的受力状况[3]。

图1 穿戴式外骨骼机器人
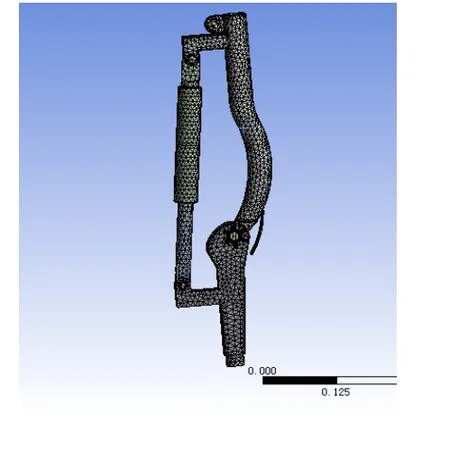
图2 外骨骼膝关节有限元划分模型
1 建模
外骨骼机器人是一个比较复杂的结构,外骨骼康复机器人的动力装置主要是由大腿的液压系统和驱动力组成[4],其中需要被优化的模型如图2所示,在SolidWorks中建立模型,并将模型导入到ANSYS Workbench中。
建立有限元模型时,所用的单元类型为SOLID187。其中大腿和小腿材料选用铝合金(Aluminum Alloy)。其弹性模量E=72GPa,泊松比U=0.33,密度ρ=2270kg/m3。其他部分采用不锈钢(Structral Steel),弹性模量193Gpa,泊松比0.31,密度为7750 kg/m3。接触面选用Bonded和No Separation,将实体转化为有限元模型后,采用自由网格划分,共含有48299个节点和26656个单元。
2 有限元分析
2.1 静态分析
理想状态下,人在稳定竖直站立时,竖直方向的力由大腿通过小腿传递到地面,液压缸不会承受竖直方向的力,但是本文设计的外骨骼机器人的三角链机构大腿采用向外突出的机构,这样可以使液压缸也能承受一定的力。

图3 静力状态下应力与应变云图

图4 前六阶固有频率下的振型图
现将外骨骼机器人的下肢移动到人体在静止状态下的状态并且大腿和液压成平行时的典型工况进行受力分析[5,6],当人背负200kg的重物时,在下肢的底部施加固定约束,在大腿的上部施加200kg的竖直向下的力,分析可以得知。在大腿和液压缸的上部有最大的位移最大位移为0.283mm,在大腿上有最大的应力,最大值为4.9Mpa,材料的屈服极限为195Mpa。远大于最大应力值,由此可知,外骨骼机器人的三角铰的最大位移和应力完全满足工作要求。
2.2 模态分析
对产品进行振动模态分析,是产品研制中不可缺少的重要步骤[7,8]。通过对三角铰链进行了前六6阶的模态分析,获得了前六阶固有频率及振型,如图4所示,从上往下,从左往右,依次为1阶振动、2阶振动、3阶振动、4阶振动、5阶振动、6阶振动。
三角铰结构的前6阶固有频率及振型,如图表1所示。

表1 三角铰结构的前6阶固有频率及振型
通过结构静力学分析可知,外骨骼机器人的整体结构满足工作要求,静力分配合理,但是通过模态分析可以看出,外骨骼的固有频率比较低,在使用液压驱动的过程中很容易产生共振,需要对机械结构进行进一步的优化,以提高外骨骼机器人的固有频率。
3 优化设计及分析
由于外骨骼机器人的刚度主要有第一阶固有频率决定同时外骨骼机器人采用液压系统进行驱动,电机的脉动频率在50Hz左右,综合考虑外骨骼机器人的设计及其可靠性可对外骨骼机器人的。固有频率和振型是机械结构的固有特征,而低阶固有频率,尤其是第一阶固有频率决定了结构的刚度,第一阶固有频率越高,模态刚度越好,因此第一阶固有频率应该尽可能高于工作频率,避免发生共振现象,提高结构的刚度。下肢外骨骼康复机器人是有液压缸驱动,液压缸安装在大腿内侧,当液压缸运动时,由分析可知,外骨骼下肢的1阶固有频率为49.348Hz,低于固有频率,所以会发生共振,这将会导致外骨骼机器人在走路时候与人体的运动不协调。这样就严重影响了机构的协调性,因此有必要对该结构进行优化,提高其低阶固有频率,以免工作时发生共振。
选择拓扑分析Shape Optimization,将目标参数设定为质量减少40%,在承受固定载荷下,减轻材料的质量为状态变量,保证结构刚度的最大的拓扑形状,得到如图5所示的优化云。
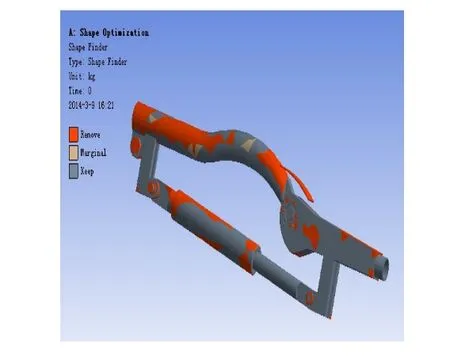
图5 外骨骼膝关节优化云
由图5可知,大腿部分存在较大的优化空间,很大部分的质量可以去除。考虑到可以将大腿的实心结构改为空心结构,优化后的大腿部分的剖视图如图6所示。

图6 大腿结构的截面视图
优化后的三角铰结构静力学仿真如图7所示, 变形量减小,最大应力有微小的增加,三角铰结构的模态振型图如图8所示,一阶模态有了明显的增加。

图7 优化后的变形图和压力最大值图
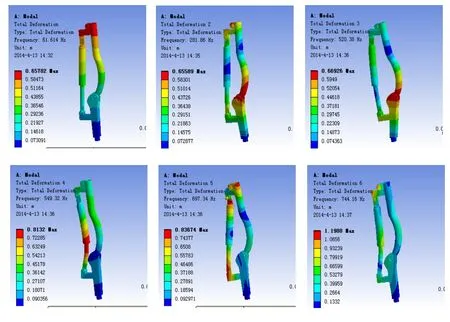
图8 优化后的外骨骼膝关节的前六阶模态
对比优化后的三角铰接进行了静力分析和模态分析,得到了其固有频率,最大位移和最大应力值,如表2所示。
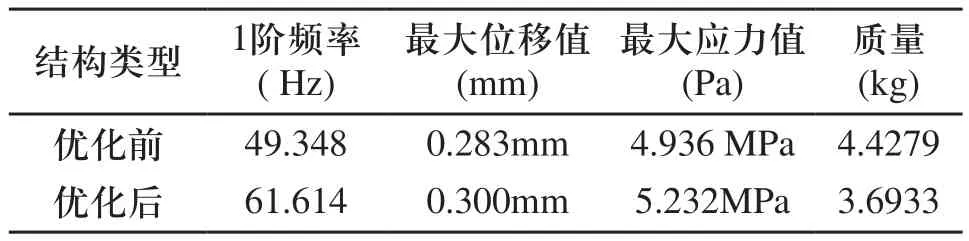
表2 改进后的方案与原方案特性比较
由优化后的结果可知,一阶模态提高到61.6Hz,最大位移和原方案相比减少了0.037mm,质量减少了1.0346kg,同时最大应力值较原方案相比增加了0.3MPa,增加量很小,仍满足要求。优化后的外骨骼的动态性能和静态性能均得到了很大的改善,质量也大大减轻。
4 结束语
通过对外骨骼膝关节的静力学和模态分析,得到了外骨骼膝关节的机械特性。应用ANSYS Workbench 的形状优化功能,对下肢外骨骼机器人的动力装置进行优化分析,通过对关键部分的优化,改变其截面结构,在满足强度要求的前提下,减轻了质量,并且提高了外骨骼机器人的低阶固有频率,提高了外骨骼机器人的动态性能,有效的避免了外骨骼膝关节在运动过程中发生共振,为以后外骨骼机器人的优化设计提供了一种高效可行的方法。
[1]尹军茂.穿戴式下肢外骨骼机构分析与设计[D].北京:北京工业大学,2010:1-12.
[2]邓楚慧.穿戴式下肢康复机器人机构分析及优化设计[D].北京:北京工业大学,2012;1-10.
[3]冯谦,张建红,焦恩璋.液压缸三铰点变幅机构优化设计方法[J].工程机械,1992(12)25-31.
[4]肖艳春,刘更谦.外骨骼式下肢康复机器人的构型及其运动学分析[D].河北:河北工业大学,2010:14-23.
[5]刘放,程文明,赵南.基于ANSYS的携行式外骨骼机械结构强度分析[J].机械设计与制造,2012(9):78-79.
[6]刘凤臣,季旭.基于ANSYS的铰链膨胀节结构强度分析[J].机械设计与制造,2011(2):204-206.
[7]高东强,田振亚,郝大建,姚素芬.基于ANSYS的丝杆动态特性分析研究[J].起重运输机械,2008,(11):54-57.
[8]张向宇,熊计,好锌,赖人铭.基于ANSYS的立柱有限元分析与结构优化设计[J].机械科学与技术,2008(12):1602-1605.
