基于3-RPS型并联机器人模糊PID控制研究
2014-10-10安梓铭朱大昌李雅琼刘运鸿
安梓铭,朱大昌,李雅琼,刘运鸿
AN Zi-ming, ZHU Da-chang, LI Ya-qiong, LIU Yun-hong
(江西理工大学 机电工程学院,赣州 341000)
0 引言
并联机器人结构的特殊性,使它具有串联机器人所不具有的优点,这引起了国际学术界的广泛关注。1989年Lee[1]研制了采用三自由度3-RPS并联机构的微动机器人;而在其控制领域中,控制方法多样,如PID控制、自适应控制法、模糊PID控制、神经元控制等。由于被控对象具有非线性、时变性和不确定性等特点,传统PID控制难以取得良好的控制效果,采用先进控制策略与传统PID控制相结合是解决这类问题的有效途径。将模糊控制器与传统PID相结合,用模糊算法在线实时修正传统PID参数,使系统具有模糊控制非线性、稳定性及高精度等优点,同时具有传统PID控制适应性良好的优点[2,3]。
SimMechanics是MATLAB中对动态系统进行建模、仿真和分析的软件包,其主要功能是对机构动态系统进行仿真和分析[4,5],王国明等对简单的二自由度并联机构用SimMechanics对其进行系统的建模和仿真[6]。然而复杂模型在SimMechanics中直接建模存在工作量大、数据计算繁琐、出错率高等缺陷。SolidWorks具有强大的实体建模能力,所以通过SolidWorks与MATLAB相联接能更有效更快捷的建立SimMechanics模型[7]。
本文采用SolidWorks与MATLAB相联接建立SimMechanics模型,在通过传统PID控制与模糊PID控制对机构进行仿真分析。
1 建立3-RPS并联机器人机构模拟框图
3-RPS并联机构的上,下平台与3个分支相连,每个支链由3个运动副连接而成,每个支链是由一个转动副,一个移动副,一个球副相连接,其中转动副分别连接定平台的各个顶点,球副分别连接动平台的各个顶点,在转动副与球副之间由移动副连接。上下平台都是由两个正三角形组成如图1所示。

图1 3-RPS并联机器人
在MATLAB中运行程序install-Addon(‘smlink.r2010a.win32.zip’)。再运行smlink_linksw命令。即实现Solidworks与MATLAB软件的关联。此时Solidworks软件中会呈现SimMechanies Link菜单。将3-RPS并联机构装配实体文件.SLDASM另存为XML文件。同时生成各个构件的.STL文件。在MATLAB中运行mech_import命令。即出现XML文件选择窗口。给出XML文件路径后,MATLAB软件将自动生成3-RPS机构的SimMechanies模型,且自动设置各构件的参数。3-RPS型并联机构SimMechanics模型如图2所示。
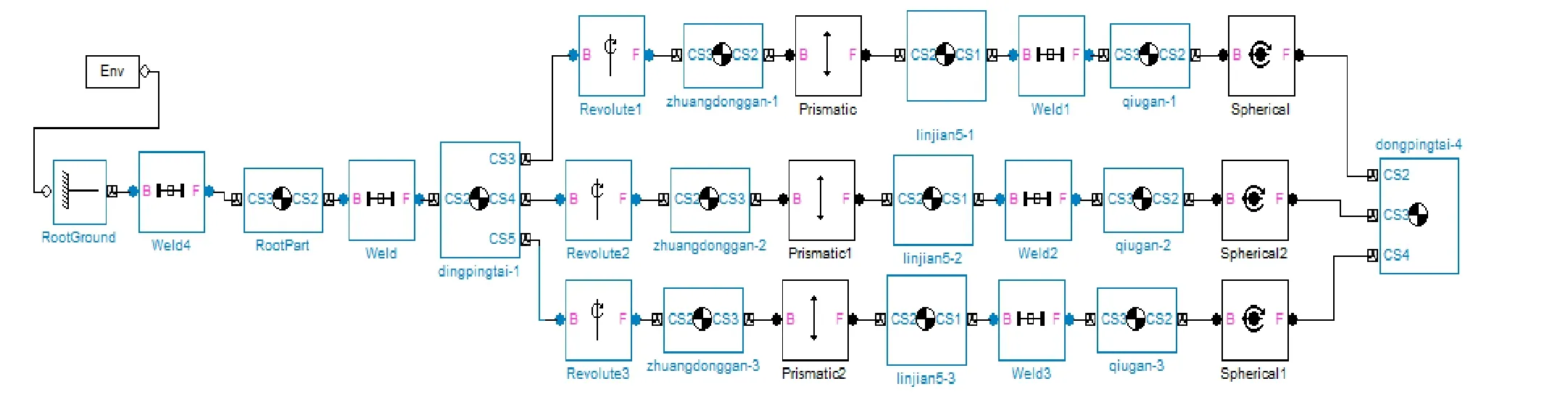
图2 3-RPS并联机构SimMechanics模型
在3-RPS并联机构的SimMechanics模型中添加相应的驱动及检测模块,并根据控制系统原理与3-RPS并联机构的结构连接关系,运用MATLAB中的SimMechanics模块集,建立仿真模型。3-RPS型并联机构仿真模型总框图如图3所示;Subsystem部分是对该并联机构系统输入的参考值,如图4所示;Controller部分表示控制器;Subsystem3部分表示该并联机构SimMechanis框图,如图5所示;Scope1,Scope2,Scope3,Scope4,Scope5为示波器,分别表示动平台的位置、速度、加速度和差值变化的输出。

图3 3-RPS并联机构PID控制SimMechanics总框图
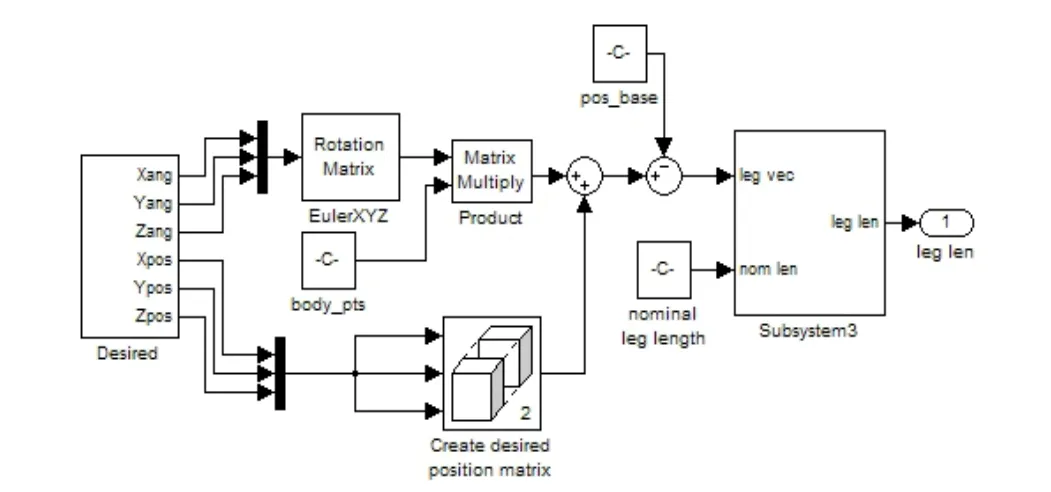
图4 3-RPS并联机构参考值输入SimMechanics框图
2 控制器的设计
2.1 传统PID控制器设计
传统PID控制具有原理简单;使用方便;适用性强;鲁棒性强等优点, 如图6所示设计的是常用PID控制器。
2.2 模糊PID控制器设计
2.2.1 模糊控制系统的结构
在传统PID控制中,其参数调整的不确定性,大大增加了控制过程中的工作量,导致其控制效果很难达到最佳。模糊PID控制原理则应用模糊理论,通过分析PID控制参数的作用效果,建立模糊规则,运用模糊推理,使PID参数能够实现实时最佳参数调整。其控制原理如图7所示。
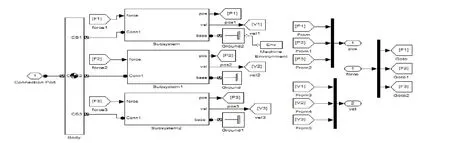
图5 3-RPS并联机构SimMechanis框图
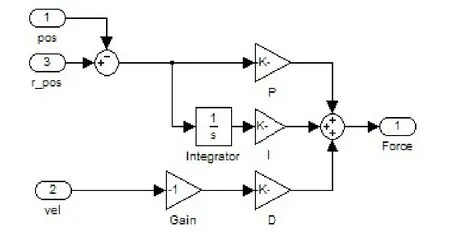
图6 PID控制器

图7 模糊PID控制系统结构框图
2.2.2 各变量隶属度函数的确定
由于模糊PID控制器主要是针对PID的三个参考进行调整,使其能够实现参数自调整的效果,同时对于该控制器的输入,选用偏差e和偏差变化率de/dt作为二输入,输出为PID控制的三个参数:∆ kp, ∆ki,∆kd,则参数kp,ki,kd可由以下公式计算得出:

式中:kp′,ki′,kd′分别为初始值。
假设将输入输出变量所对应的模糊子集以及其模糊论域可定义为如下:
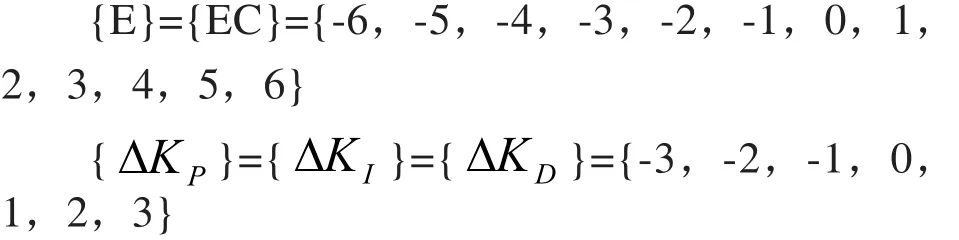
其中:{E},{EC},{∆KP},{∆KI},{∆KD}的模糊子集都定义为:{NB,NM,NS,ZO,PS,PM,PB},其中各元素分别表示为:{负大,负中,负小,零,正小,正中,正大}。由于三角形隶属函数控制效果最佳,因此,隶属函数类型选则三角形,则其分布如图8所示。
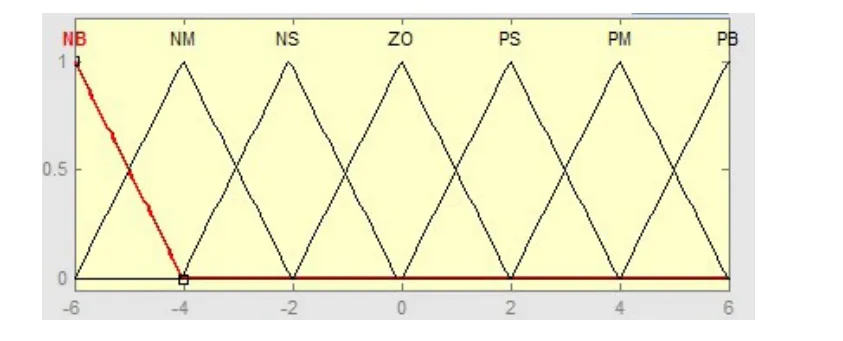
图8 隶属函数分布图
2.2.3 模糊规则的确定
根据上文对PID三个参数控制作用的分析,结合一些专家的PID控制经验,得出关于∆kp,∆ki,∆ kd三个参数的控制规则表。如表1~表3所示。

表1 ∆KP模糊规则表

表2 ∆KI模糊规则表
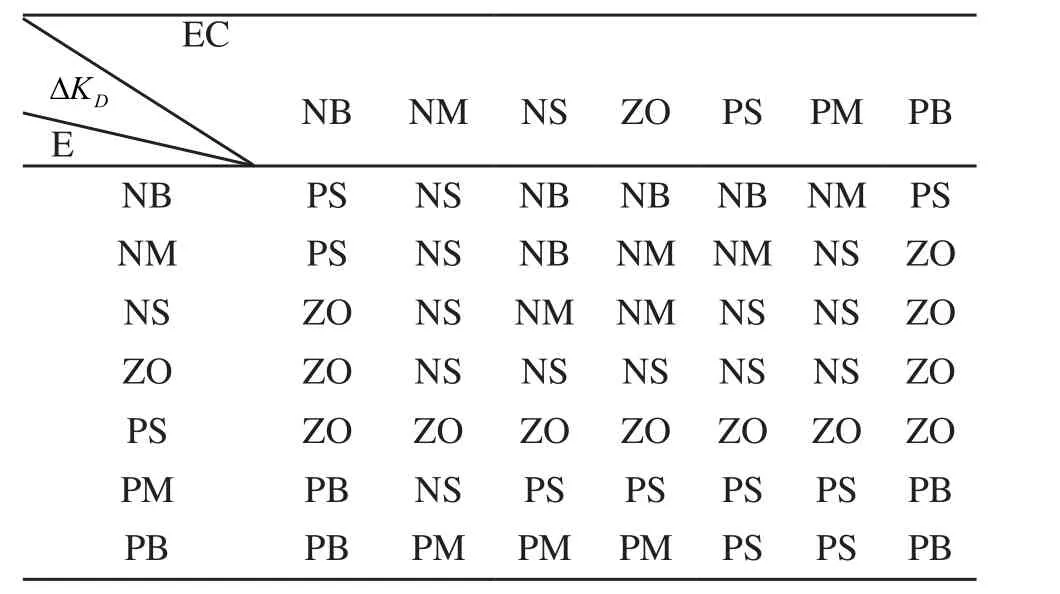
表3 ∆KD模糊规则表
模糊PID控制是结合了模糊控制和PID控制两种控制原理,共同作用于被控对象已实现对被控对象的实时控制。因此,模糊PID控制器的设计应充分兼顾二者的优点,从而达到更好控制效果的目的。如图9所示设计的是模糊PID控制器。
3 控制仿真结果
设置初始参数kp=0.12,k1=6,kD=2,调节PID控制器参数和调节模糊PID控制器参数,通过仿真分析得出如图10、图11所示在两种不同的控制方式中产生的驱动杆实际输出与参考值的差值变化。传统PID控制的变化幅值比模糊PID控制幅值大,模糊PID控制输出相对更平滑,并计算分析其性能指标如表4所示。则反映出模糊PID控制精度,稳定性和动态偏差均优于采用传统PID控制,这为进一步研究并联机器人控制性能的提高奠定了基础。
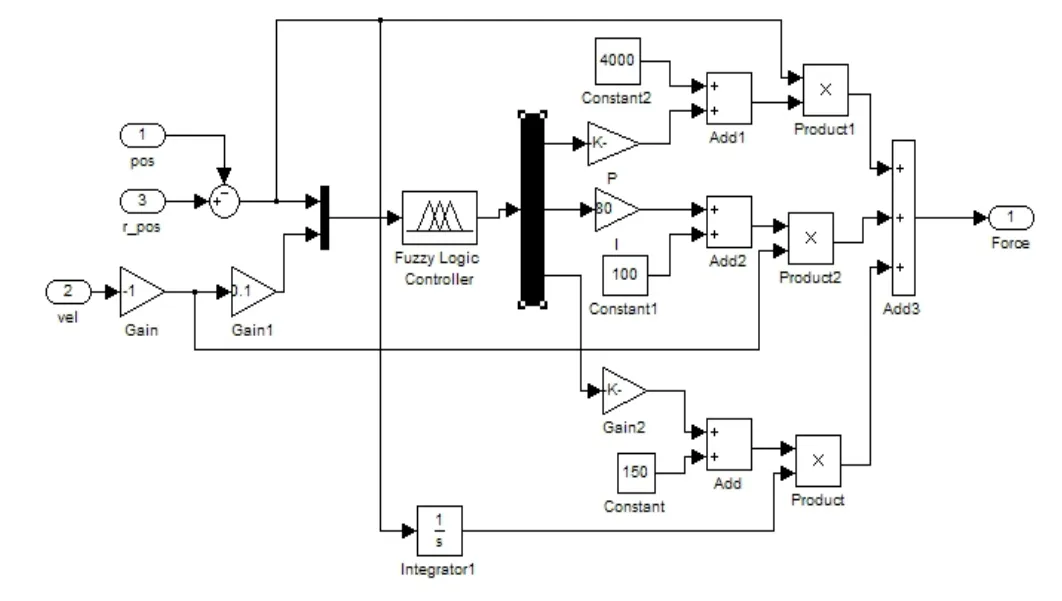
图9 模糊PID控制器
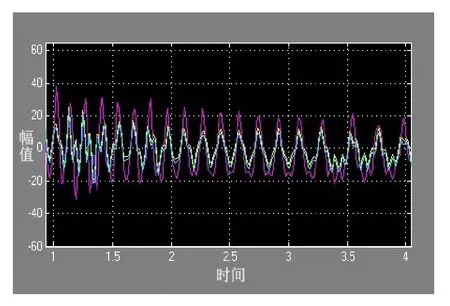
图10 PID控制的驱动杆实际输出与参考值的差值变化
4 结束语
运用SolidWorks与MATLAB相关联能更有效,快捷的建立SimMechanics仿真模型,依据控制系统原理与并联机器人的关系,采用MATLAB中SimMechanics仿真框图,建立并联机器人控制仿真模型,通过传统PID控制与模糊PID控制的结果对比分析,表明传统PID结合模糊控制理论取得明显优于单一控制的效果, 控制输出相对更平滑等。运用此法可使模糊PID控制得到更好地实际应用。
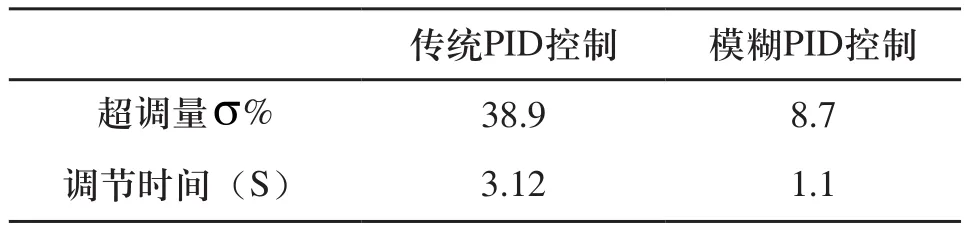
表4 性能指标对比表

图11 模糊PID控制的驱动杆实际输出与参考值的差值变化
[1]K.M.Lee, S. A 3-DOF Micro-Motion In-Parallel Actuated Manipulator.IEEE Conference on Robotics and Automation,1989:1698-1703.
[2]苏玉鑫, 段宝岩, 张永芳,等.并联机器人的非线性PID控制[J]. 控制与决策,2003,18(04):490-494.
[3]杨益兴,崔大连,周爱军.模糊自适应PID 控制器及Simulink 仿真实现[J].舰船电子工程,2010(4):127-130.
[4]王英波,黄其涛,郑书涛,等.Simulink 和SimMechanics 环境下并联机器人动力学建模与分析[J].哈尔滨工程大学学报,2012(1):100-105.
[6]Yuan Shaoqiang,Liu Zhong,LiXingShan. Modeling and simulation of Robot Based on Matlab /SimMechanic[J].Proceeding the 27th Chinese control conference,2008(6):16-18.
[7]王国明,马履中.基于SimMechanics 的二自由度并联机器人运动学仿真[J].机械设计与制造,2012(6):162-164.
[8]杨树川,邵金龙,杨术明,等.基于Solidworks&SimMechanics的机构运动分析与仿真[J].河北工业科技,2011,28(04):221-225.
