基于PID控制的X模式四旋翼飞行器研究
2014-09-26黄军友
黄军友
(四川信息职业技术学院 四川 广元 628000)
X模式四旋翼飞行器具有载荷轻、体积小、自主飞行、控制复杂等特点,基于PID控制的X模式四旋翼飞行器,飞行控制的系统硬件设计的总体要求选择低功耗电子设备、高性能遥控接收设备、高速微处理器、良好的可扩展性、强抗干扰性等。可靠性、可行性、先进性、实时性和高集成度是具体的方案设计过程中应该重点考虑。
1 硬件设计
X模式该模式以两根轴的正中间为前进方向,调节迅速,由两个电动机共同完成一个轴的控制,前进方向为电动机1和电动机2中间的方向,如图1所示。
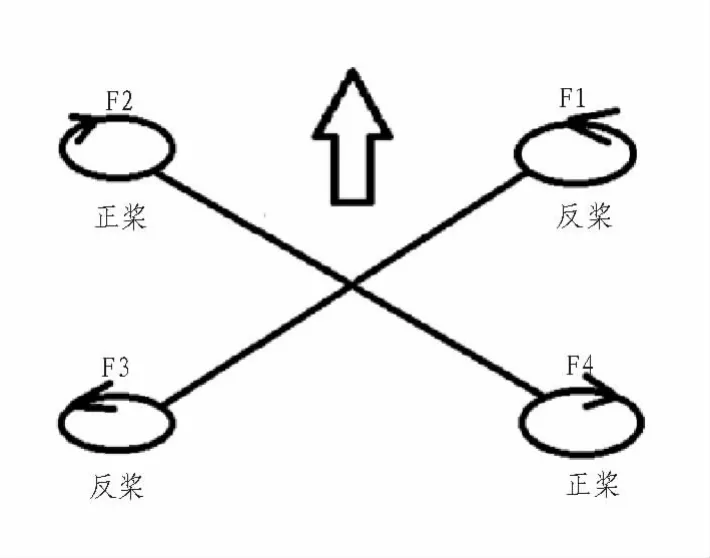
图1 X模式四旋翼飞行器的电动机与桨的关系Fig.1 Relationship between motor and propeller X mode Quadrotor Helicopter
飞行控制板是整个系统的核心,包括电源接口电路、遥控接收电路、姿态检测传感器电路、PWM信号输出电路、编程接口电路、信号指示电路等。采用ST公司基于Cortex-M3内核的STM32F103C8T6的32位ARM芯片,外设有定时器、ADC、SPI、I2C、 USART 和 USB 等[1]。电子调速器(ESC)采用好盈电调产品,遥控采用2.4G天地飞-7遥控器。
1.1 电源接口电路
电源接口电路是采用5 V转3.3 V的三端稳压芯片LM1117,由于飞行控制板体积比较小所以采用了SOT-223的封装。下图中的C20与C17均为退耦电容,大小为0.1 μF,C18为钽电容起稳压的作用,大小为47 μF,如图2所示。
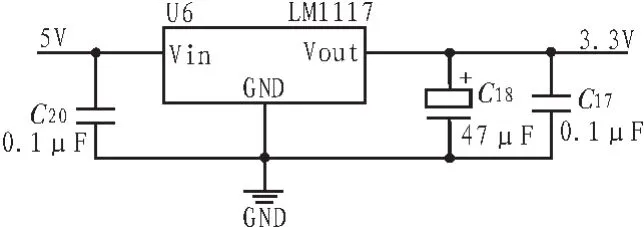
图2 电源接口电路Fig.2 Power interface circuit
1.2 姿态检测传感器电路
姿态传感器包括陀螺仪传感器、加速度计传感器。陀螺仪传感器选择村田公司的ENC-03RC,测量范围为-300度每秒~+300度每秒,输出0~3.3 V的模拟信号,在未测量到角速度信号时输出的电压为1.35 V。加速度计传感器选择飞思卡尔公司的MMA7361三轴的模拟加速度计传感器,可以工作在±1.5 G和±6 G两种状态,工作在±1.5 G模式时为800 mV/g。加速度计传感器电路如图 3,C15、C16、C17分别为 Z、Y、X 轴的滤波电容,大小为3 300 pF。
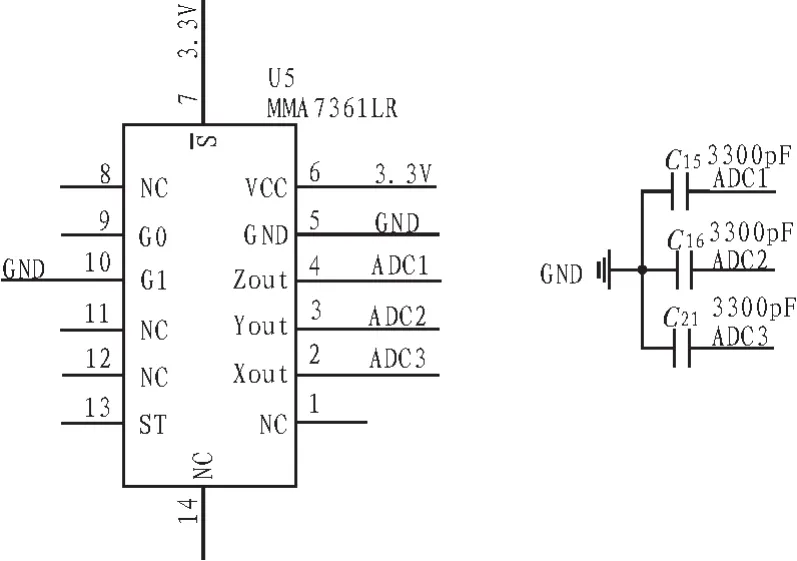
图3 加速度计传感器电路Fig.3 The accelerometer sensor circuit
单轴陀螺仪传感器的电路如图4,C1滤除电源中高频信号部分,C2防止电源不稳造成的角速度输出不稳,C3保证基准电压的稳定,R1和C4构成一个低通滤波器,FC≈1.4 K。
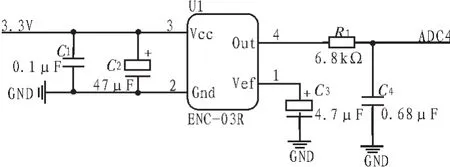
图4 单轴陀螺仪传感器电路Fig.4 Single axis gyroscope sensor circuit
2 软件部份
四旋翼飞行器具有6个空间自由度,同时只能通过调节4个螺旋桨的转速来实现飞行控制,属于欠驱动系统的一种。系统具有高度非线性、参数摄动、多目标控制要求及控制量受限等特点[2]。
2.1 姿态解算分析
维纳滤波器需要太大的内存开销、及大量的运算[3];卡尔曼滤波需要得到实际物体的准确模型,单片机需要处理的运算量太大、严重降低了实时性[4]。结合实际系统的处理器配置采用互补滤波算法,互补滤波器能融合加速度计传感器和陀螺仪传感器二者的数值,最后通过滤波器得到一个较精确的姿态角、和互补算法的计算量较小又不需要精确模型的这些优点后、对卡尔曼进行简单的解耦。互补滤波算法简述如下:第一件是即时融合,就是实时地根据加速度计的数值反推出陀螺仪积分应有的数值,然后根据当前的陀螺仪积分进行调整。第二件是长期融合,在代码里用0.5秒的时间采集加速度计的数据,然后到0.5秒时对这些数据进行平均,依此来得到一个相对稳定的加速度计数值。根据这个数值来相对准确地知道四轴这0.5秒的姿态,然后再修整调整量,做到自动稳定到平衡位置。第三件是根据调整量的大小,决定是否需要修改陀螺仪中立点。
2.2 PID控制
PID控制简单的说就是按偏差的比例 (Proportional)、积分(Integral)、微分(Derivative)进行的控制[5]。 PID 控制器的控制算法为:

上式中 u(t)是 PID 控制器的输出,e(t)是 PID 控制器的输入,Ji是积分时间常数,Td是微分时间常数。
2.3 程序流程
整个平衡控制程序利用C语言和汇编语言完成,即混合编程。程序流程如图5所示。
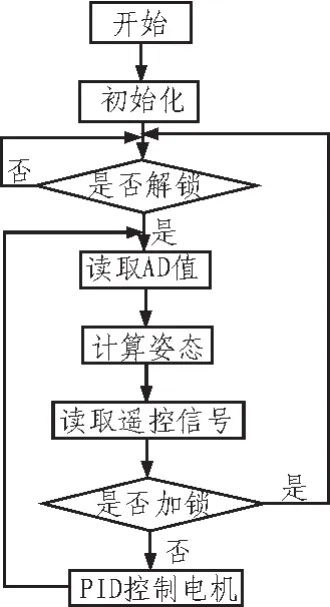
图5 程序流程图Fig.5 Program flow diagram
3 互补滤波器滤波仿真
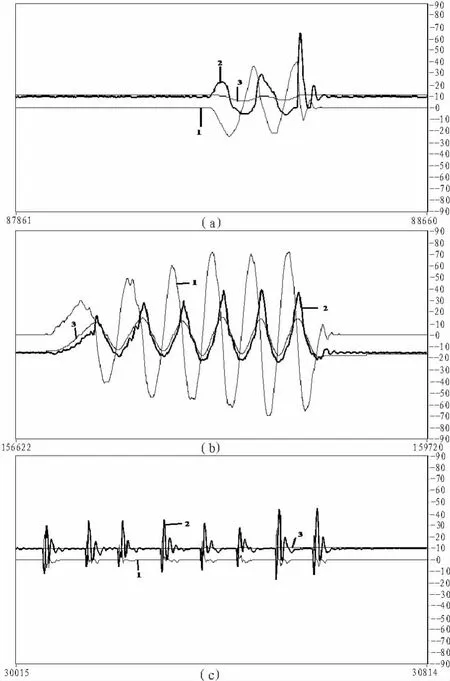
图6 姿态解算滤波仿真图Fig.6 Attitude solution filter simulation diagram
图6(a)是在阶跃干扰时通过滤波器得到的一个滤波波形,图中1为陀螺仪传感器数值波形、2为加速度传感器数值波形、3实线为最终的滤波效果波形。表明此滤波器对阶跃干扰具有良好的抑制作用。图6(b)是在左右摇晃时通过滤波器得到的一个滤波波形,图中1为陀螺仪传感器数值波形、2为加速度传感器数值波形、3实线为最终的滤波效果波形。表明滤波效果稳定可靠。图6(c)是在水平方向来回滑动时通过滤波器得到的一个滤波波形,图中1为陀螺仪传感器数值波形、2为加速度传感器数值波形、3为最终的滤波效果波形。表明加速度传感器对于水平运动量是比较敏感。
4 结束语
受限于模型的精确性,经过理论分析得到的飞行控制参数不一定是四旋翼飞行器样机飞行中的最佳控制参数,悬停测试,在5 s的测试时间内,四旋翼飞行器左右前后移动幅度小于10 cm。倾斜角度小于15度。
[1]LED_hq.STM32F103C8T6[EB/OL].[2012-02-16].http://baike.baidu.com/view/7751910.htm.
[2]孙宁,方勇纯.一类欠驱动系统的控制方法综述[J].智能系统学报,2011(3):200-207.
SUN Ning,FANG Yong-chun.A review for the control of a class of underactuated systems[J].Caai Transactions on Intelligent Systems,2011(3):200-207.
[3]芮兵,吴敏忠,江庆平.FIR方法在维纳滤波器设计中的应用与仿真[J].现代计算机,2011(19):10-13.
RUI Bing,WU Min-zhong,JIANG Qing-ping.Application and simulation of FIR method in wiener filter designing[J].Modern Computer,2011(19):10-13.
[4]符拯,王书满,刘丙杰.自适应卡尔曼滤波的最新进展[J].战术导弹技术,2009(6):62-66.
FU Zheng,WANG Shu-man,LIU Bing-jie.An overview of the development of adaptive kalman filtering[J].Tactical Missile Technology,2009(6):62-66.
[5]顾立钧.最优控制系[M].北京:水利电力出版社,1993.
[6]庞庆霈.四旋翼飞行器设计与稳定控制研究[D].安徽:中国科学技术大学,2011.
