3×4矩阵变换器的双电压控制策略
2014-09-26王汝田崔永恒陈酋峰伏祥运
王汝田,崔永恒,陈酋峰,伏祥运
(1.东北电力大学 电气工程学院,吉林 吉林 132012;2.国网连云港供电公司,江苏 连云港 222004)
0 引言
矩阵变换器MC(Matrix Converter)与传统变换器相比具有许多优良的性能和优点,已经成为近年来研究的一个热点[1-12]。在这些研究文献中,大多数是针对三相输入三相输出的矩阵变换器(3×3 MC)拓扑结构带三相平衡负载进行研究。
随着电力电子技术的快速发展,各种非线性负载的应用越来越普遍,同时在实际中接于三相电源的负载也不一定是平衡负载,所以常要求变换器电源具有对不平衡和非线性负载供电的能力。对于3×3MC,当三相负载不平衡时,相电流的不平衡使得负载的中性点电位发生偏移,输出不对称的三相电压,从而影响负载的正常工作。三桥臂的变换器带不平衡负载时,负载电压不对称,有负序和零序电压,对于负序电压可以通过闭环控制来消除,但是对于零序电压却无能为力,这是三桥臂变换器自身拓扑所不能克服的[13-14]。
为了对不平衡负载供电,常用的方法是在3×3MC和负载之间加一个△/Y接线的变压器,但是其工作在基波频率,体积、重量较大,成本较高,使得MC体积小、功率密度高的优点荡然无存,这也使得MC的“全硅”概念失去了意义。文献[15-16]采用3×4 MC拓扑结构,将其中的一相桥臂(N相桥臂)直接连接到负载的中性点。文献[15]在双空间矢量调制的基础上,通过N相桥臂对负载的中性点电位进行控制,从而可以在不平衡负载的情况下输出三相对称的负载电压。文献[16]把双空间矢量调制方法中逆变级的调制改进为三维空间矢量调制,从而可以对零序电压进行控制,为不平衡负载提供三相对称的电压。
MC的双电压控制是一种典型的直接控制策略,与其他控制方法相比,具有如下突出优点:当三相输入电压不对称或含有谐波时,占空比的计算可以自动修正而不需额外的计算量,使输出电压仍然保持为所期望的参考正弦电压。这使得双电压控制策略在实际应用中具有一定的优越性。本文基于3×3 MC的双电压控制策略提出了3×4 MC的双电压控制策略。
1 3×4 MC的拓扑结构
3×4 MC和3×3 MC相比多出一相输出桥臂N,相应地多出了3个双向开关,其拓扑结构如图1所示。12个双向开关按照3×4的矩阵进行排列,通过双向开关的导通与关断,三相交流输入中的任意一相可以连接至四相交流输出中的任意一相。N相桥臂可以带负载ZN和A、B、C三相构成一个四相系统;也可以直接连接到三相负载的中性点(令ZN=0),用于控制中性点的电压,使得A、B、C三相输出电压波形为任意波形,或者是当三相负载为不平衡或非线性负载时,使得三相负载电压为三相对称电压。本文针对后者情况进行研究。为了分析3×4 MC中N相桥臂的控制方法,下面先对3×3 MC的双电压控制策略作简要介绍、推导。
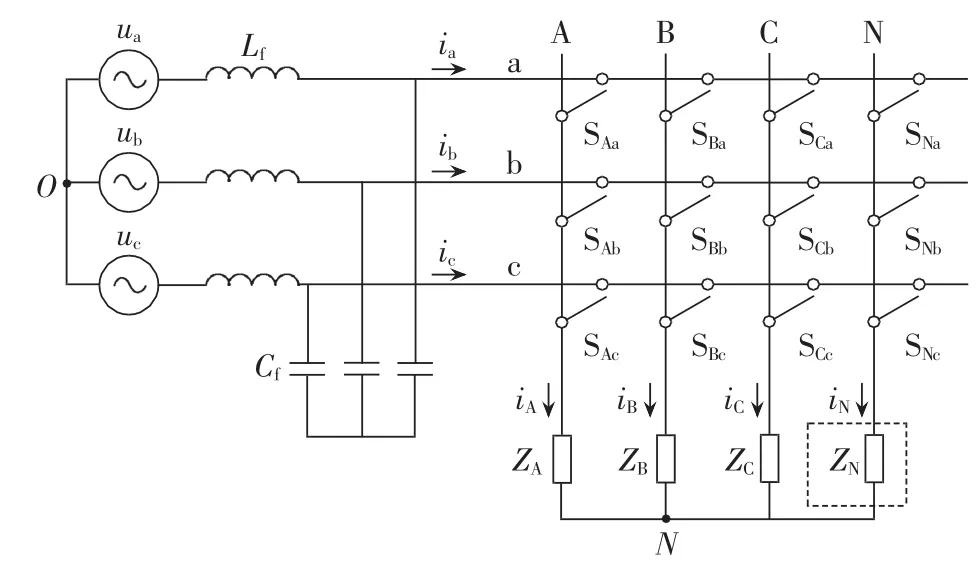
图1 3×4 MC的拓扑结构Fig.1 Topology of 3×4 MC
2 3×3 MC的双电压控制策略
图1中N相桥臂的3个开关始终断开,令其负载ZN=0,则变为 3×3 MC。
假设电网三相输入相电压的表达式为:
其中,Uim、ωi分别为输入相电压的幅值和角频率。
由图1可知,三相负载的中性点即为N点。假设参考三相输出相电压的表达式为:
其中,Uom、ωo分别为参考输出相电压的幅值和角频率。
为了对MC进行调制,双电压控制策略将1个周期Ts内的输入、输出电压各分成6个区间,分别如图2和图3所示。
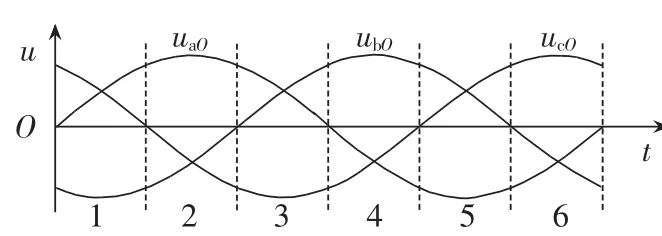
图2 输入电压区间划分Fig.2 Partition of input voltage
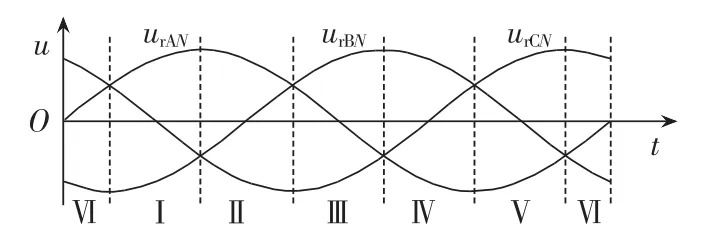
图3 输出电压区间划分Fig.3 Partition of output voltage

其中,d2、d3、d1和 e2、e3、e1分别为输入线电压 uab、uac、uaa在合成输出线电压uAB、uAC中被利用的占空比,并且有如式(4)所示的关系。
双电压控制策略[3]的原理是:在每个输入、输出电压扇区组合内,输出线电压由2个具有较大值的输入线电压和零电压采样合成,开关占空比与输入电压的瞬时值成正比,所得到的输出电压局部平均值为所期望的正弦参考电压。
例如输入电压在区间2、参考输出电压在区间I时,2个具有较大值的输入线电压为uab和uac。参考输出线电压urAB、urAC、urCB均为正值,这里选择被合成的输出线电压为urAB和urAC,因为这样选择可以使得MC工作过程中具有原点开关[7],降低开关损耗。根据双电压合成方法的原理,可以得到输出的线电压为:

式中的各个占空比根据双电压合成调制策略的原理可以求出,如下所示:
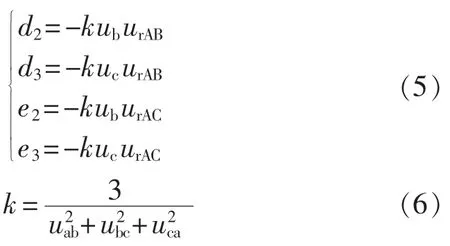
结合MC的拓扑结构,由合成公式知道,输出的A相始终连接在输入的a相上,开关SAa称为原点开关[7]。在合成输出线电压uAB时,只需要在d2Ts时间段内让输出的B相连接到输入的b相上,在d3Ts时间段内让输出的B相连接到输入的c相上,在d1Ts时间段内让输出的B相连接到输入的a相上即可。同样,在合成输出线电压uAC时,只需要在e2Ts时间段内让输出的C相连接到输入的b相上,在e3Ts时间段内让输出的C相连接到输入的c相上,在e1Ts时间段内让输出的C相连接到输入的a相上即可。
3 3×4 MC的双电压控制策略
上述的双电压控制策略可以输出三相对称的线电压,当3×3 MC带平衡负载时,三相负载相电压也是对称的。但是当所带负载为非平衡负载时,负载中性点电位偏移,三相负载相电压不再是对称的。这时可以合理控制3×4 MC的N相桥臂,从而控制负载中性点的电位,使得三相负载相电压为三相对称电压。
为便于从现有的3×3 MC往3×4 MC扩展,本文继承3×3 MC的双电压控制策略,而对中线桥臂进行单独控制。
下面首先分析在双电压控制策略下,输出A、B、C三相桥臂对电源中点O点的电压情况。
仍然假设输入电压在区间2,参考输出电压在区间I,根据上面的原理分析知道,A相桥臂一直连接在输入a相上,由此可以得到:

同样根据调制过程,可以得到B相桥臂对O点的平均电压为:

将式(5)代入化简可得:

同样经过分析可以得到C相桥臂对O点的平均电压为:

三相桥臂对O点的电压与参考三相负载相电压之差为:
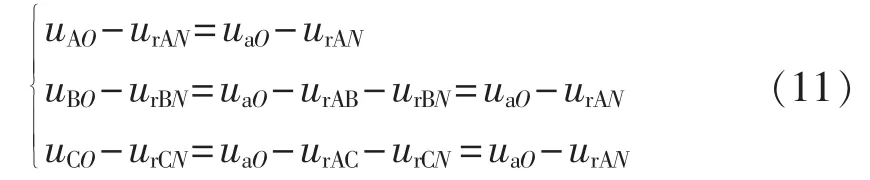
由上式可以看出,这个差值三相是相等的,即三相桥臂对O点的电压中含有零序分量。对于3×4 MC,只需控制N相桥臂,使得负载中性点N对O点电压等于此零序分量,即:

那么实际输出的三相负载相电压即为所希望得到的三相对称电压:
用三相输入相电压来合成N相桥臂输出电压uNO:

其中, f1、f2、f3分别为输入相电压 uaO、ubO、ucO在合成输出电压uNO中被利用的占空比,并且有如下的关系:

式(14)和(15)可以整理为:

参照文献[17],令:

代入式(16)得:

整理、求解可得:

代入式(17)并化简整理可得:

根据上面的推导,在合成输出电压uNO时,只需要在f2Ts时间段内,让输出的N相连接到输入的b相上(即SNb导通),在f3Ts时间段内,让输出的N相连接到输入的c相上(即SNc导通),在f1Ts时间段内,让输出的N相连接到输入的a相上(即SNa导通)即可。
同理,可以推导出在其他输入、输出电压区间时的情况。
4 仿真分析
本文基于MATLAB/Simulink和S函数建立了仿真模型,对3×4 MC带不平衡负载和平衡负载情况进行了仿真。仿真参数如下:三相对称输入电压,其相电压峰值为311 V,频率为50 Hz,输出三相电压峰值为269V(最大输出电压),输出电压频率为100Hz;负载1为平衡负载,三相电阻负载,阻值为6 Ω;负载2为不平衡负载,三相电阻负载分别为12、6、8 Ω;输出滤波电感、电容分别为2 mH、24 μF,开关频率为20kHz。仿真结果如图4—6所示。
图4为平衡负载情况下,3×3 MC和3×4 MC的输出电压,两波形形状几乎一样,为三相对称正弦波。这说明在平衡负载情况下,3×4 MC和3×3 MC具有相同的性能。
图5为3×3 MC带不平衡负载时的输出电压和输出电流。三相输出电压波形是不对称的,其中A、B相的电压峰值分别为324、235 V,都远远偏离了参考输出电压,随着负载不平衡的加剧,其电压不对称程度也会加剧,非常不利于负载的运行。
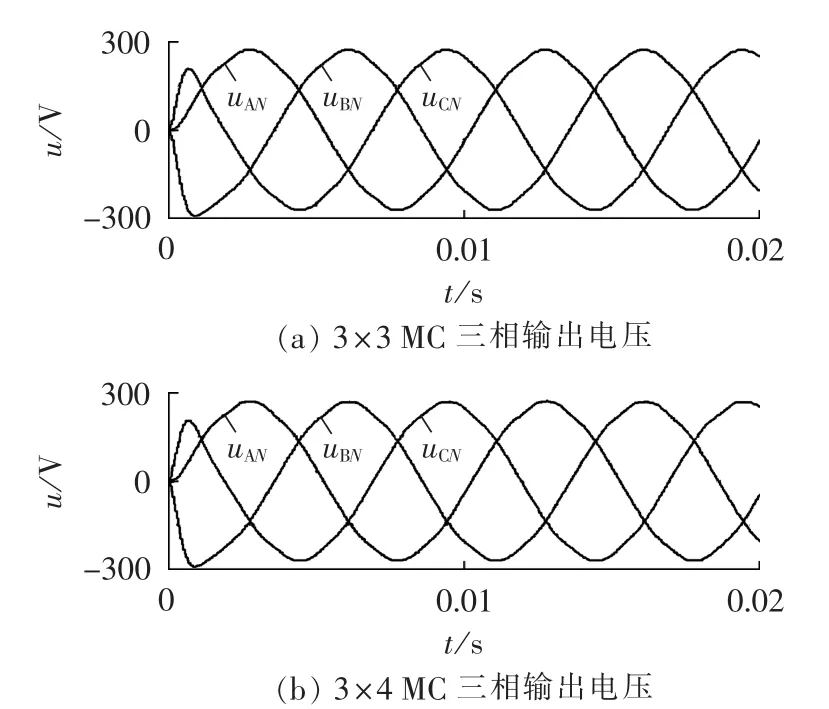
图4 带平衡负载时的仿真结果Fig.4 Simulative result with balance load
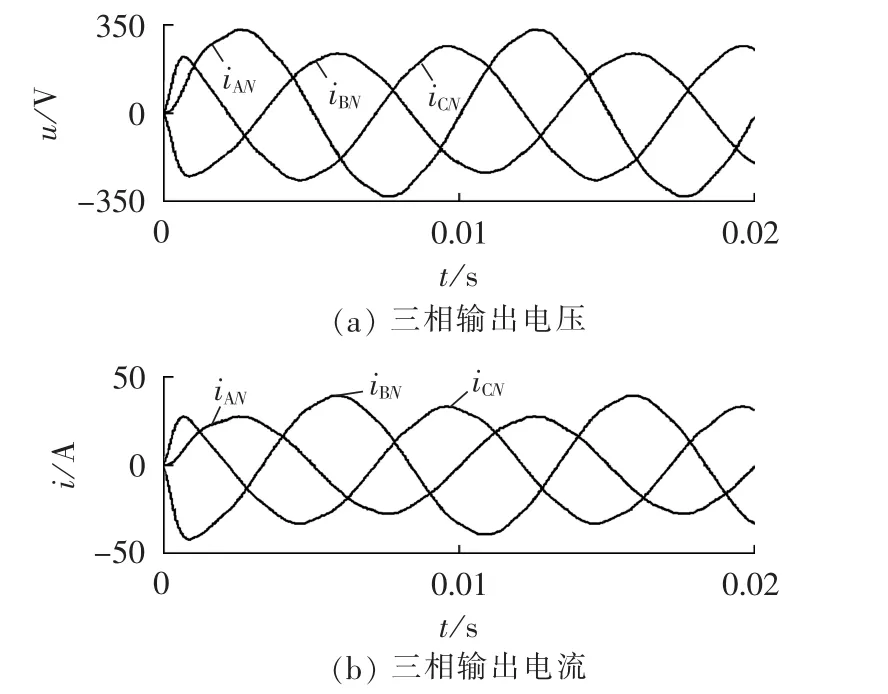
图5 3×3 MC带不平衡负载时的仿真结果Fig.5 Simulative result of 3×3 MC with unbalance load
图6为3×4 MC带不平衡负载时的输出电压和输出电流。经过中线桥臂对负载中性点电压的控制,其三相输出电压基本对称,且幅值接近参考电压幅值,三相幅值分别为271、269、270 V。这说明在不平衡负载情况下,3×4 MC仍然能够为负载提供三相对称的电压,保证各相负载的正常运行。
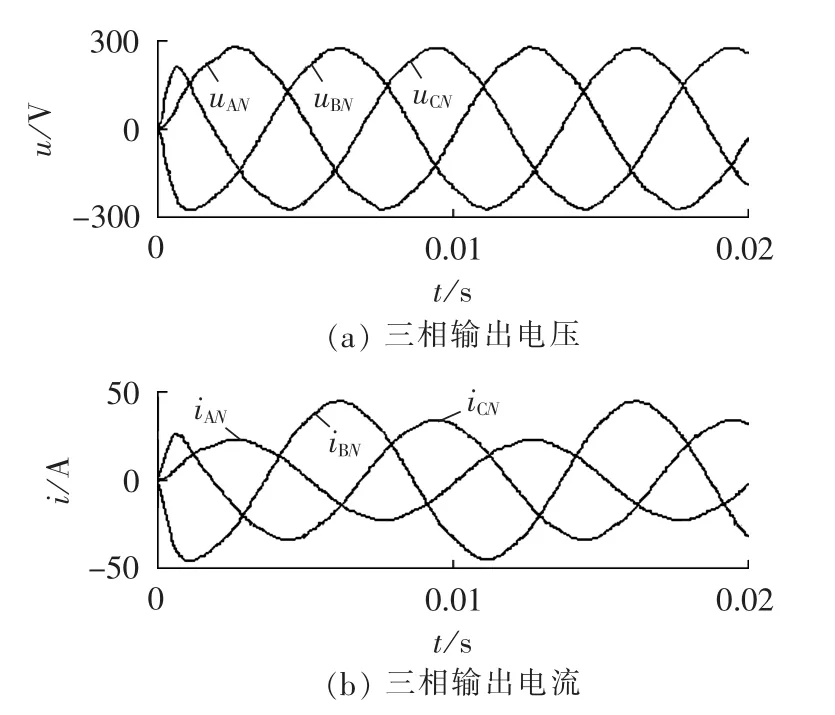
图6 3×4 MC带不平衡负载时的仿真结果Fig.6 Simulative result of 3×4 MC with unbalance load
5 结论
MC具有优越的性能,但是3×3 MC不能带不平衡负载,这限制了MC在实际中的应用。本文应用3×4 MC拓扑结构,对3×4 MC带不平衡负载的情况进行了分析、推导,在此基础上对原3×3 MC部分采用双电压控制,对中线桥臂应用脉宽调制进行单独控制,使在调制方法上对3×3MC具有很好的继承性,便于对现有设备的改造。应用MATLAB/Simulink进行了仿真,仿真结果验证了本文理论分析的正确性。