基于PSCAD/EMTDC仿真平台的特高压直流输电控制系统研究
2014-09-26,
,
(广西大学电气工程学院 智能变电站技术实验室,广西 南宁 530004)
1 引言
高压直流输电快速可控的特点使得高压直流输电的控制部分在高压直流输电系统中占有重要的地位。特高压直流控制体系结构与常规直流工程相比,必须保证其有更高的可靠性和系统可用率,因此,需要考虑新的层次结构。例如,要充分考虑站层控制,避免对控制保护系统造成整体影响;要求双极控制层、极控制层独立配置,避免相互影响;确保阀组控制层设备的独立性等,而由此所带来的信号传输网络和信号接口也更为复杂。分析清楚特高压直流系统控制的结构、功能以及特高压直流系统的控制特性下不同控制方式对特高压直流系统运行的影响,对于进一步研究特高压直流系统的控制策略对其所连交流电网暂态稳定性的影响、直流系统控制方式对扰动后交流系统电压和功率恢复的影响具有非常重要的作用。
目前针对直流输电的电磁暂态仿真研究基本上均基于CIRGE标准测试模型,其控制方式简单,仿真结果与实际工程差距较大。由于特高压直流工程控制保护系统的复杂性,要准确地研究特高压直流输电的动态行为、分析故障特性,进行直流保护定值校核,研究交直流系统的相互影响,就必须建立详细、准确、与实际系统特性一致的控制保护系统仿真模型。
本文在详细分析特高压直流系统分层控制模式和各控制环节功能的基础上,通过对实际控制保护系统关键环节的处理,分析和总结出特高压直流输电系统所需的核心控制功能,以PSCAD/EMTDC电磁暂态仿真程序为仿真平台,建立能够反映特高压直流输电控制系统特性的数字仿真模型。并通过多种运行模式、故障方式的仿真波形与实际录波的对比,验证仿真模型的准确性。
2 特高压直流控制原理及原则
±800kV云广特高压工程采用了两极双阀组,即高压阀组与低压阀组串联运行、双十二脉动的接方式原理图如图(1)。
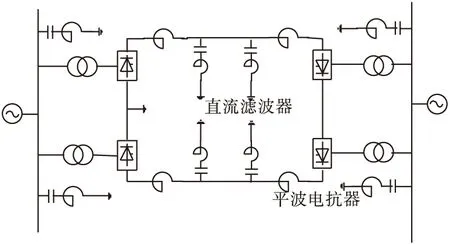
图1 特高压直流输电系统的原理图
图(2)为特高压直流输电系统的等值电路图,由等值电路图可以看出,稳态直流电流为:
(1)
整流侧和逆变侧的直流功率为:
(2)
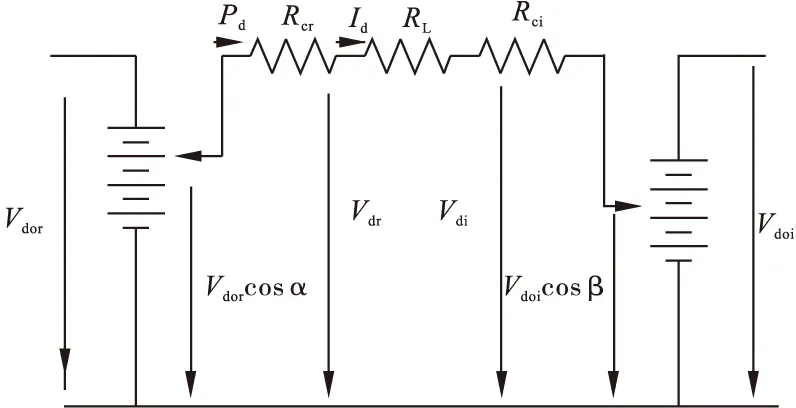
图2 特高压直流输电系统的等值电路图
特高压直流输电系统可通过控制整流器和逆变器的内电势来控制线路上的直流电压及电流(或功率)。因此,特高压直流输电的基本控制手段就是通过调节Vdor、α、Vdoi、β这四个量以满足直流输电系统的运行要求。直流输电系统的控制方式主要分为换流器角度控制方式和换流变压器分接头控制方式。
通过调节加到换流阀控制级的触发脉冲相位来实现直流线路电压、电流和功率的调节,即调节整流器的触发角α或逆变器的触发越前角β(或熄弧角)。这种方式具有调节范围大、控制速度快(一般1~10ms)等优点,换流器的快速控制可防止直流电流的剧烈波动,是保证高压直流输电线路稳定运行的重要要求,是直流输电系统主要的控制手段。
通过调节加在换流器上的交流电压,即调节换流变压器分接头来实现对直流线路电压、电流和功率的调节。分接头控制模式包括角度控制模式和电压控制模式。换流器的分接头开关是机械式的,调节一档的时间通常需要5~15s的时间,响应时间较长,所以分接头调节只能作为辅助调节手段[3]。
高压直流输电要求控制保护系统要完成以下基本的控制保护功能:(1)直流输电系统的起停控制,高压直流输电系统的起动或停运是通过一定顺序对交直流开关设备的操作,换流器的解锁或闭锁,完成功率按给定速率上升或下降等操作来实现。(2)输送功率的大小和方向控制,对输送功率大小的控制是通过改变电流整定值来实现的,而直流功率的反向输送则是通过改变直流电压的极性来实现。(3)抑制换流器非正常运行及对所连交流系统的干扰,当多端HVDC系统的直流侧发生故障时,应迅速判断故障的线路并将其切除,使剩余系统尽快恢复运行。(4)直流输电保护控制,发生故障时,进行控制系统切换以及保护动作,来保护换流站设备,提高系统稳定性。(5)信息监控,对换流站、直流线路的各种运行参数以及控制系统本身的信息进行监视,有利于及时发现异常,进行控制及保护。
除上述的基本控制功能外,直流输电控制保护系统中还具备满足交直流系统动态性能要求和帮助系统自愈等功能,其主要内容如下:(1)谐波和无功控制,通常是根据系统性能需求装备合适容量和组数的交、直流滤波器组以及电容器组,或使用多脉动换流器,以此降低和避免对交流系统的不良影响。(2)变压器分接头控制,交流系统电压是换流变压器、换流器以及直流系统性能设计的重要依据,其变化影响到触发角的控制,也可能使直流系统无法运行,并威胁到设备的绝缘安全。为降低和避免交流电压对直流系统造成的不良影响,换流变压器分接头控制是解决上述问题的重要功能之一。(3)通信故障时提高系统动态性能,远距离直流工程两端换流站间的通信通道应保证可靠快速,用以传输整定值、保护设备状态等信号。为提高直流系统可靠性,在站间通信通道失去时,仍允许整流侧按故障前指令、逆变侧按实际测量为参考指令进行功率或电流的自动控制。
3 特高压直流分层控制系统
直流输电通常采用分层方式来实现不同级别的控制,以提供高效而稳定的运行、在不危及设备安全的前提下最大限度地提高功率控制的灵活性。
直流输电系统四层控制方式包括:(1)总控制,对直流系统每一个换流站提供控制指令,使直流系统按照要求运行。(2)站控层,构成完整的整流站与逆变站的控制、监视、和保护系统的公共部分,并对换流站内每一个极进行相互协调控制;负责执行交直流设备的投切、起停、运行方式转换、状态监测等功能。(3)极控制,使换流站内每一个极的换流单元的控制系统相互协调,是提供的被调量指令只产生最小的谐波量。(4)桥控制(阀控制),用于控制换流器每个阀的触发。
其中,站控制系统主要功能包括:(1)与调度中心通信联系,接受中心的控制指令,向中心输送运行信息;(2)根据调度中心的输送功率指令分配各直流回路的输电功率,当某一直流回路故障时,将少送的输电功率转移到正常的线路,尽可能保持原有输送功率;(3)紧急功率支援控制;(4)潮流反转控制;(5)各种调制控制,用于抑制交流系统振荡的阻尼控制,功率/频率控制;(6)决定双极的功率定值;(7)功率传输方向控制;(8)极功率/电流指令计算(含过负荷限制),向极控制层提供功率指令;(9)稳定控制功能;(10)极间功率转移(PPT)控制功能;(11)接地极电流平衡控制(CBC)功能;(12)换流站无功功率和交流母线电压控制功能。
极控制级主要功能包括:(1)从系统控制级接收极电流/功率参考值,由此计算产生换流器层控制所需要的直流电流、直流电压、熄弧角控制设定值;(2)极的解锁/闭锁控制;(3)极的起停控制;(4)极电流限制;(5)极电流协调;(6)低压限流环节;(7)极的空载加压实验;(8)换流变分接头控制;(9)换流器触发相位控制;(10)故障处理控制,包括移相停运和自动再起动控制等。
阀控制级的主要功能有:(1)取触发脉冲的同步信号功能,将换流站交流母线电压输入到锁相倍频器中,输出同步信号;(2)控制脉冲发生功能产生满足要求的触发脉冲系列,送到阀基电子设备,从而触发晶闸管阀;(3)阀触发监视功能。
4 控制系统仿真
为了验证基于PSCAD/EMTDC 的直流控制保护系统仿真平台搭建的直流控制系统的电磁暂态模型与实际工程的控制系统的功能与特性的一致性,本文以以糯扎渡—鹤山 ±800kV 特高压直流输电工程为对象,建立交流系统、换流器、换流变压器、换流阀、交流滤波器、直流滤波器、平波电抗器、输电线路的仿真模型。实际工程的直流控制系统包括多个控制调节回路,主要包括直流功率和电流控制、电流裕度补偿、定电流调节器、定直流电压控制器、定熄弧角控制、换流变分接头控制等,各个控制调节回路相互配合,共同实现直流系统的稳定运行。
本文所建立的特高压直流输电控制系统分为个层次:双极控制层、极控制层和换流器控制层。双极控制层接收来自调度中心的直流输送功率指令,经过电流指令计算以后发送一个直流电流期望值给极控制层,在极控制层中直流电流实测值与经过调节过的电流期望值之间的差值输入到电流调节器中,随后经过与电压调节器和定角控制器三者之间相互协调控制后最终得到触发角指令给各个换流器控制单元。
4.1 双极控制建模
双极控制层接收调度中心发来的功率指令,通过电流指令计算和控制模式的选择,得出电流期望值,送入下一层极控中的电流调节器。控制模块结构框图如图3所示。
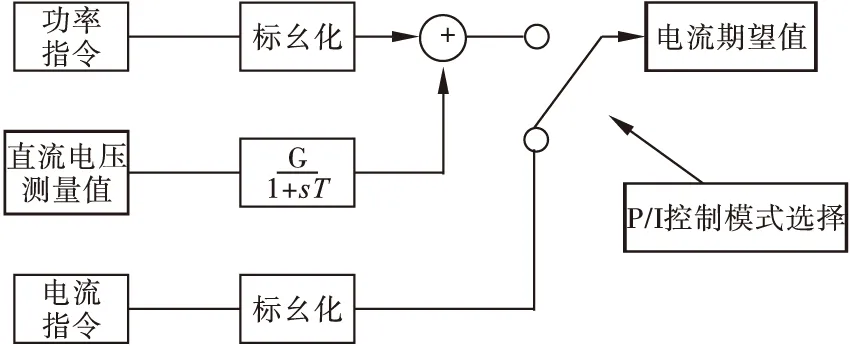
图3 双极控制模块结构框图
4.2 极控制层建模
4.2.1 整流侧控制模型
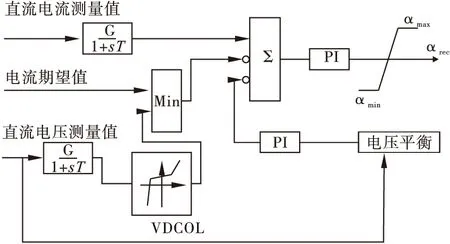
图4 整流侧控制器
整流侧采用带有最小触发角限制的电流调节器,同时投入低压限流环节和电压平衡环节。上一级输出的直流电流期望值和经过低压限流环节调节得到的电流值取小得到电流整定值。
由于特高压直流系统采用双极十二脉动换流器,每个换流器都有各自的控制单元,电压平衡环节就是针对每个极两换流器之间的平衡调节而存在的。根据整流侧实现的相关功能原理,建立整流侧控制器如图4所示,包括实现定电流控制的电流调节器、低压限流调节和电压平衡控制等。
4.2.2 逆变侧控制模型
逆变侧主要采用定角控制、定电流控制和定电压控制协调配合的控制方式,同时配有电流偏差控制和电压平衡环节。逆变侧控制器结构如图5所示。定角控制、定电压控制与通过电压平衡环节修正的定电流控制器所得触发角信号做比较,取三者之间最小者来决定逆变侧的最终控制模式。
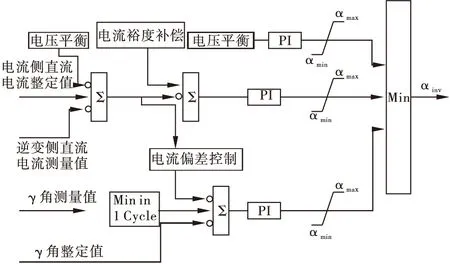
图5 逆变侧控制器
4.3 换流器控制层建模
直流输电换流器控制功能主要完成两个功能:取触发脉冲的同步信号,产生满足要求的触发脉冲系列以触发晶闸管。通常触发脉冲的同步信号由锁相倍频器(PLL)获得,锁相倍频器的输入信号取自换流站交流母线电压,其输出即为同步信号,应严格与换流站交流母线电压频率保持确定的倍数关系。为了提供控制系统阀触发回路可以直接使用的锯齿波信号,通常在PLL后面加上一个压控振荡器,组成PLO系统。模型库中6脉动晶闸管桥元件内置的PLO就可较准确的实现这一功能。
4.4 仿真结果分析
本文对直流系统瞬时故障的暂态特性进行仿真实验来验证所建的直流控制模型,仿真步长为50μs,仿真时间为5s。双极系统正常运行后3s,正极直流线路发生区内直接接地短路,故障时间0.05s。各项电压波形如图6所示。
实际故障电压波形如图7所示。
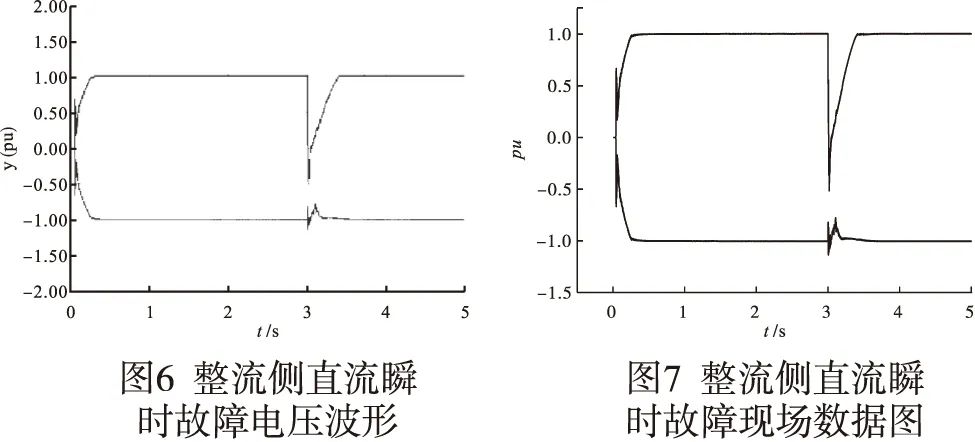
结果表明,该模型设计合理,满足正常稳定运行时的各项稳态指标以及故障情况下的控制要求,可较准确的反映特高压直流系统的动态行为。
[1] 赵婉君.高压直流输电工程技术[M].北京:中国电力出版社,2004.
[2] 马为民.特高压直流系统换流器控制[J].高电压技术,2006,32(9):71-74.
[3] 肖星,张尧.基于EMTDC的特高压直流控制系统的建模与仿真[C]//中国高等学校电力系统及其自动化专业第二十四届学术年会论文集.北京,2008.
[4] 石岩,韩伟,张民,等.特高压直流输电工程控制保护系统的初步方案[J].电网技术,2007,31(2):11-15.
[5] 陶瑜,马为民,马玉龙,等.特高压直流输电系统的控制特性[J].电网技术,2006,30(22):1-4.
[6] 张勇军.高压直流输电原理与应用[M].北京:清华大学出版社,2012.
