加速度计标定用三轴摇摆台控制系统仿真与试验研究
2014-09-25陈国民梁利华
陈国民, 梁利华
(1.哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001;2.黑龙江科技大学 电控学院,黑龙江 哈尔滨 150022)
0 引 言
三轴摇摆台作为一种测试设备有着广泛的应用,其可以用来对加速度计进行标定与测量,也可以对船舶运动进行模拟和对导航设备测试,对速率和位置精度均有很高的要求,因此,在转台的各部分中广泛使用精密机构,如轴系采用精密机械轴承,角度测量元件为高分辨率的光电编码器、光栅、感应同步器等,执行电机采用高质量的直流无刷电机,尽量减小摩擦和电机力矩波动等因素对转台性能的影响,可以用DSP来实现对电机的控制[1]。对于三轴摇摆台伺服系统高频响、高精度等特性的要求,已经有自适应鲁棒解耦控制和状态观测器法[2,3]等相关研究,但存在着复杂和计算量大等缺点。
针对上述情况,本文对三轴摇摆台的控制系统进行了仿真研究,并通过试验验证了三轴摇摆台系统的性能指标。
1 摇摆台伺服系统数学模型
由于三轴摇摆台3个框架是由各自的伺服电机驱动的,对三轴摇摆台三框架运动状态的控制其实就是对3个框架伺服电机的控制,因此,可以将伺服电机看做被控对象。由于交流伺服电机的精确模型相对复杂,且内部参数无法获得,建立精确的数模型比较困难。因此,从工程实际来看,交流伺服电机可以作如下描述:
在机电伺服系统中,机械传动系统结构形式多种多样,分析起来相当复杂,在这里忽略机械传动轴的弹性形变,可以得到带负载的电机模型,如图1所示。其中,执行电动机为永磁直流它激式,激磁电压为恒定电压,以求得到恒定磁通。U为电枢电压,I为电枢电流,R为电机电枢电阻,L为电机电枢电感,Jd为电枢转动惯量,JL为负载转动惯量,i为减速机减速比,n为电动机轴角速度,ω为减速机输出角速度,φ为负载轴角位移[4]。
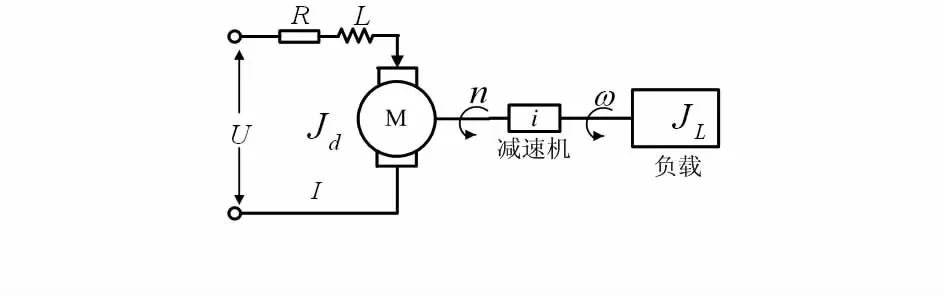
图1 电机负载模型
根据电动机电枢电压直接写出电枢电压平衡方程的拉氏变换式
U(s)=(Ls+R)I(s)+E(s).
(1)
电枢绕组中的反电势为
E(s)=Ken(s).
(2)
其中,Ke为电机反电势系数。
负载角速度与电机转速满足
n(s)=iω(s).
(3)
当电枢绕组中有电流时,在固定磁场中产生的电磁转矩为
Me(s)=KtI(s).
(4)
其中,Kt为电机的转矩系数。
电动机转矩平衡方程式为
Me(s)=Md(s)+ML(s).
(5)
其中,Md(s)为电机本身的阻转矩,ML(s)为折算到电机轴上的负载干扰转矩。
令干扰力矩ML(s)为零,以电枢电压U(s)为输入,角度为输出,则传递函数可表示为
(6)

2 位置—速度—电流反馈三环结构
三轴摇摆台机械系统结构复杂,如果要解决耦合干扰、摩擦干扰等不确定干扰的影响,实现要求的性能指标,显然要采用复杂的控制策略,本文采用位置—速度—电流反馈的三环控制结构。
电流环是摇摆台的转矩调节系统,通过电机电枢电流的调节来进行转矩的调节,改善电机的工作特性。电流环的采用使反电势对电枢电流的影响将变得很小,这样在电机负载突变时,电流负反馈的引入起到了过载保护的作用。由于电流环的一项重要作用是保持电枢电流在动态过程中不超过允许值,电流环按Ⅰ型系统进行设计,电流环调节器采用PI调节器,其传递函数为
(7)
式中Ki电流调节器的比例系数,τi为电流调节器的超前时间常数。
速度环是位置控制系统中非常重要的一个环节。由于三轴摇摆台控制问题复杂,引入速度环来分散解决控制中出现的干扰问题。速度环调节器设计的准则就是在保证系统稳定性的前提下,尽可能拓宽速度环的带宽[5]。根据多闭环控制系统设计的原则,对于有位置环的三环控制系统来说,要把速度环校正成典型Ⅰ型系统,转速调节器ASR也采用P调节器,其传递函数为
WASR(s)=Kn,
(8)
式中Kn为转速调节器的比例系数。
位置环是摇摆台控制系统设计中最重要的一个环节,位置环设计的主要目的就是提高控制精度,使系统的输出量准确地跟踪输入量,满足系统的稳态精度要求。对于摇摆台系统,一方面要求其具有稳定的瞬态响应,不允许位置跟踪有较大的超调;另一方面要求稳态误差要小,以便达到较高的位置控制精度。位置环是最外环,应该具有较好的动态跟踪性能、稳态性能和抗干扰性能。根据位置环的作用,在设计位置环时,应将位置环设计成典型的Ⅱ型系统。将速度环作为位置调节系统的内环,取位置反馈为单位负反馈,位置调节器采用PID调节器,其传递函数为
(9)
式中Kp为位置调节器的比例系数,Ki为积分系数,Kd为微分系数,位置—速度—电流环动态结构图如图2所示。

图2 位置—速度—电流环结构图
3 三轴摇摆台机电联合仿真
本文利用ADAMS/Controls和Matlab/Simulink协同仿真对三轴摇摆台位置伺服三环控制系统性能进行仿真验证。
3.1 摇摆台伺服系统联合仿真模型建立
分别对三轴摇摆台的横摇、纵摇和艏摇三套位置伺服系统进行仿真分析,通过对位置—速度—电流反馈三环控制系统仿真结果的分析,证明位置—速度—电流反馈三环控制器设计的合理性和可行性[6]。按照图3建立的三轴摇摆台伺服控制系统的结构搭建联合仿真控制系统,仿真框图如图3所示。图中的模块Adams_sub代表ADAMS软件中生成的一个子系统,它包含了ADAMS中创建的三轴摇摆台机械系统虚拟样机模型信息。

图3 三环控制系统仿真框图
摇摆台系统的输出是框架的角速度,作为摇摆台模型的外部输出传递给控制系统;控制系统输出是驱动力矩,加载到摇摆台系统的回转轴上,作为摇摆台模型的外部输入传递给摇摆台模型。
图4为用ADAMS建立的机械结构控制模型图。通过对动力学模型输出参数的判断和计算,可以提供相应的回转轴上的驱动力矩,控制过程如图3所示。
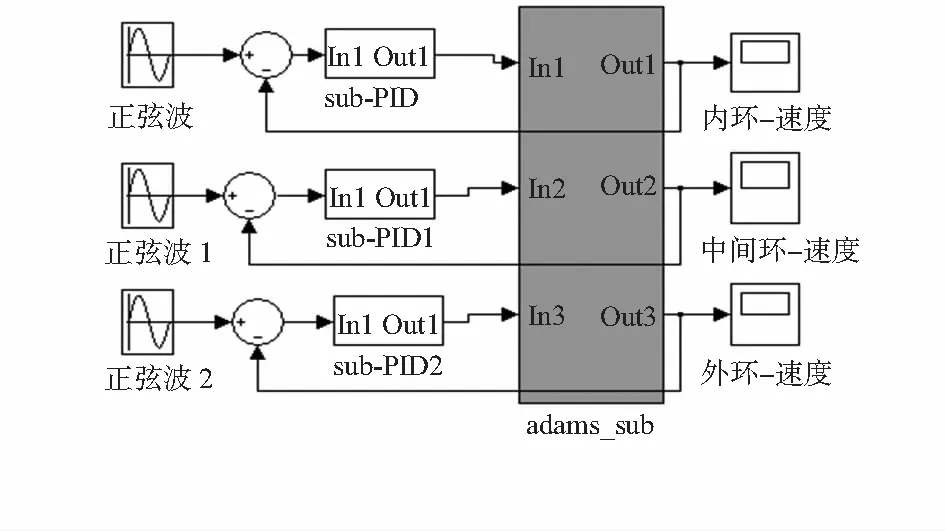
图4 机械结构控制模型图
3.2 系统联合仿真
三轴摇摆台正常工作的最小摇摆周期为2 s,本文以横摇框为例来说明。设横摇框最大摇摆幅值为±45°,在Matlab/Simulink中按照摇摆台工作的极限条件,对横摇输入正弦信号Yr=45sin 180t,设置仿真时间为4 s,按照图3进行仿真,对控制系统的转矩特性、正弦位置信号跟踪特性进行分析。三轴摇摆台横摇框驱动转矩曲线如图5所示,其中,实线为单轴运动情况下驱动转矩曲线,虚线为实际运动情况下驱动转矩曲线。

图5 横摇框转矩曲线
摇摆台横摇框架位置伺服系统的正弦信号跟踪对比曲线和误差曲线如图6和图7所示。
通过三环控制系统曲线对比分析可知:在横摇框稳定运行状态下,实际驱动转矩与理想驱动转矩曲线相比,位置—速度—电流三环控制系统的驱动转矩幅值波动范围为0~34.5 %;横摇框位置—速度—电流三环控制系统的正弦信号幅值波动范围为-46.87°~+46.24°,幅值变化比率为-4.16 %~+2.76 %,相位滞后1.7°。从以上数据对比分析中可以看出,位置信号的动态跟踪性能满足系统的幅值和相位的性能指标要求。
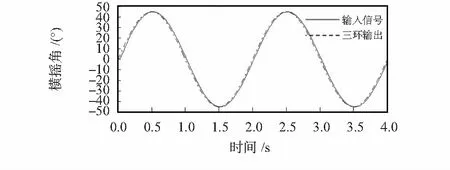
图6 横摇框正弦跟踪曲线

图7 横摇框正弦跟踪误差曲线
4 三轴摇摆台试验结果
为了验证三轴摇摆台系统的性能指标,对研制成的三轴摇摆台物理样机进行了测试。让摇摆台横摇框以最大的摇摆幅值(±45°)做频率响应为0.5 Hz的正弦摇摆运动,通过数据采集,横摇框对0.5 Hz的正弦信号跟踪曲线如图8所示。

图8 横摇框0.5 Hz正弦跟踪曲线
通过对0.5 Hz最大频响正弦信号跟踪实测数据可知,采用位置—速度—电流三环控制策略的三轴摇摆台系统性能良好,工作稳定。
5 结束语
本文创新地采用了一种联合仿真的方法来对摇摆台伺服系统进行仿真分析,给出了仿真系统控制图和机械结构模型图,最后给出了各种仿真曲线。通过仿真曲线对比和试验数据证明:横摇轴驱动转矩幅值波动较小,幅值变化率的绝对值小于4 %,相位之后小于1.7°,横摇框0.5 Hz正弦信号跟踪曲线非常理想,系统的幅值和相位的性能指标优良,完全能够满足加速度计标定的精度要求。
参考文献:
[1] 刘治钢,王军政,赵江波.基于DSP三轴跟踪转台伺服控制系统设计[J].微计算机信息,2006,22(6-2):170-172.
[2] Lee Ho Seong.Robust motion controller design for high-accuracy positioning systems[J].IEEE Transactions on Industrial Electronics,1996,43(1):48-55.
[3] Kempf C J.Disturbance observer and feedforward design for a high-speed direct-drive positioning table[J].IEEE Transactions on Control Systems Technology,1999,7(5):513-526.
[4] 郑 凯,胡人喜.ADAMS2005机械设计高级应用实例[M].北京:机械工业出版社,2006:23.
[5] 崔广志.电动三轴仿真转台控制系统研究[D].哈尔滨:哈尔滨工业大学,2007.
[6] 于 爽,付 庄.惯性平台不平衡力矩测试方法及补偿控制[J].上海交通大学学报,2008,42(10):1692-1696.
