基于STM32的无线光电传感器设计
2014-09-25陆万田刘晓卫徐晓东
陆万田, 王 崴, 刘晓卫, 徐晓东
(空军工程大学 防空反导学院,陕西 西安 710051)
0 引 言
随着现代制造业的发展,大型构件吊装在工程上的应用越来越多,如雷达天线、风力发电机、飞机装配等。大型构件和设备吊装技术分为整体吊装、综合整体吊装和散件吊装三种情况,大型构件吊装的前提是确保作业的安全性和准确性。大型构件在吊装过程中,不确定因素非常多,例如:碰撞、吊装错位等,吊装人员一旦出现操作上的细微失误,对吊装件损伤和吊装人员的生命安全都会造成极大的威胁。因此,对大型构件吊装过程进行精确监控和预警在工程上具有十分重要的意义。
iGPS是美国Metris公司在开发的一种类似GPS定位系统的大尺寸测量系统。该系统采用室内激光发射器代替卫星的作用[1,2],利用高速旋转的激光发射器代替卫星发射器,每个激光发射器可发射出2个激光平面对空间进行扫描,然后通过光电传感器进行信号接收并进行相应算法的处理即可获得所测量物体的坐标值。其坐标测量采用了类似于GPS解算方程组的思想,测量精度可达0.2 mm,可以满足大型构件吊装的精度要求。因此,应用iGPS监控吊装过程可以大大提高吊装的准确度与安全性。iGPS自带的光电传感器需要通过有线方式连接到工业控制计算机,由于吊装过程的特性,有线连接方式的光电传感器并不适合于吊装过程。因此,开发一种无线光电传感器,对提高iGPS在吊装过程中的实用性和提高吊装过程的准确度、安全性都具有非常重要的意义。
1 无线传感器总体设计
1.1 无线光电传感器
基于STM32F103的无线光电传感器采用现代无线通信技术,可以不受距离的约束,将采集的激光信号实时发送到上位机进行处理。该无线光电传感器由传感器、信号处理电路、MCU、无线发送模块等组成,结构见图1。传感器将接收到的激光信号转换成为电流量,通过信号处理电路将微弱的传感器电流量转换成为可供STM32F103采集的信号,然后再通过数传模块将采集到的信号发送至上位机。

图1 无线光电传感器结构
1.2 传感器
传感器部分采用的是硅光电池,硅光电池基于光生伏特效应,是一种大面积的PN结。当光照射时,使其电子发射跃迁,成为自由的电子在PN结两端聚集产生电势差,通过接通PN结两端在电势差的驱动下,将有电流输出[3]。
本文选择了德国Pacific Silicon Sensor公司的PC50—6型硅光电池作为的传感器部件,其具有噪声低、频率特性好、型面精度高、光面均匀稳定等优点。
1.3 微处理器
微处理器采用ST公司生产的STM32F103ZET6芯片,STM32F103增强型单片机基于高性能的ARMCortex-M3(32位的RISC内核)[4],是一个低功耗的处理器,具有门数少、中断延迟小、高度容易等特点[5],其AD采集频率最高可达1 MHz,满足iGPS数据处理要求。
1.4 无线数传芯片
无线数值芯片采用nRF24L01,该芯片采用2.4~2.5 GHz ISM频段[6],支持多点通信,最高传输速率可以达到2 Mbps,满足传感器对实时性的要求。nRF24L01采用SPI接口与MCU间进行通信时,只需要6个引脚配置即可完整的实现nRF24L01的工作模式、状态控制,即SCK,MISO,MOSI,CE,CSN,IRQ 6个引脚,分别对应主控芯片的PB13,PB14,PB15,PG6,PG7,PG8等6个IO口。
2 硬件电路设计
2.1 前端处理电路
硅光电池的信号比较微弱,必须经过前端处理电路的处理后才能供MCU采集。前端处理电路包括前置放大、差分减法、低通滤波以及末级放大等模块组成。
硅光电池输出的是电流信号,前置放大电路应先将电流量转换成为电压量再进行相应处理,前置放大模块见图2,输出电压值Uo=-Ri。根据信号采集要求,前置放大电路输出的电压量为0~1 V。

图2 前置放大电路
由于硅光电池的输出信号受到电磁干扰、环境以及温度温度的影响,信号底噪大,信噪比差,因此,采用两块硅光电池进行差分补偿,即使用减法器对两路硅光电池信号进行相减,有效地减少环境中的大部分干扰。差分补偿电路见图3。

图3 差分补偿电路
经过差分补偿电路后,信号还存在少量高频噪声。贝塞尔滤波器(Bessel filter)通带内延时特性最平坦,相位特性好,缺点是截止特性差,阻带衰减较缓慢。由于对输出信号波形保真有严格要求,而频率截止性可以通过增加滤波器的阶数来弥补。根据有关滤波器设计方法,考虑到贝塞尔滤波器截止性差的缺点。选用了2个常用的二阶压控电压源(VCVS)电路串联组成四阶的贝塞尔滤波器电路结构见图4。根据有源滤波器的快速设计手册[7],查表求得电阻值R1=0.55 kΩ,R2=2 kΩ,R3=R4=5.1 kΩ,R5=820 Ω,R6=11 kΩ,R7开路,R8短路;电容值C1=C2=C3=0.001 μF,C4=0.000 1 μF。
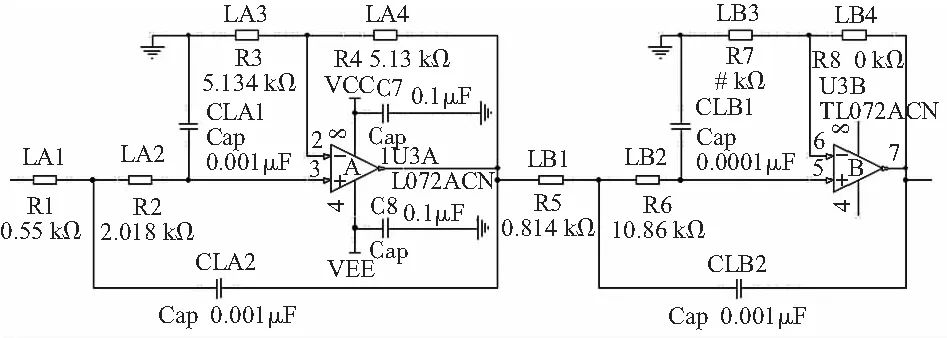
图4 低通滤波器
STM32F103ZET6的AD采集参考电压为3.3 V,因此,在末级放大时应将信号放大3.3倍。末级放大电路见图5。
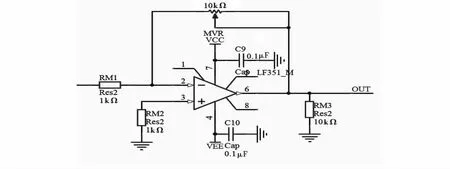
图5 末级放大电路
2.2 微处理器电路
微处理电路包括电源模块、复位电路、晶振电路等,是主控模块工作的最小系统。电源模块采用LM1117—3.3和LM1117—5.0芯片,为主控芯片提供3.3 V电压和为部分外设提供5 V电压。
3 软件设计
3.1 AD采集
STM32F103ZET6内部集成了3个12位逐次逼近型的A/D转换器,其最高采集频率为1 MHz,即进行一次A/D转换只需要1 μs,详细设置步骤如图6。
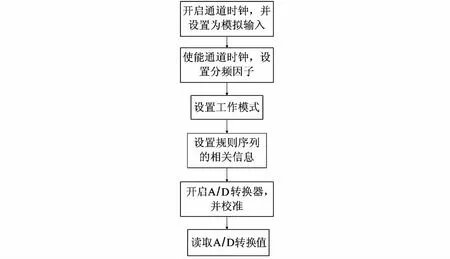
图6 A/D转换设置步骤
3.2 nRF24L01的配置
nRF24L01可以设置为五种工作模式: Power Down Mode;Tx Mode;Rx Mode;Standby-1Mode;Standby-2 Mode。使用过程中最为常用的模式为Tx Mode和Rx Mode两种,即发送与接收模式,故在此只介绍这两种工作模式的配置方法。
nRF24L01使用步骤如下:
1)配置nRF24L01,配置内容详见表1。2)清除状态标志位。3)写CONFIG寄存器,0x0e为发送模式,0x0f为接收模式。发送模式下装载数据后写CONFIG寄存器并置CE为高并延时10 μs;接收模式下写CONFIG寄存器并置CE为高并延时至少130 μs。4)IRQ中断信号来临后进行相应处理,进入下一个循环。IRQ 引脚会在以下三种情况变低:Tx FIFO 发完并且收到ACK(使能ACK 情况下);Rx FIFO 收到数据;达到最大重发次数。将IRQ 接到外部中断输入引脚,在遇到上述三种情况时,IRQ 引脚变低,MCU通过中断对数据进行处理。
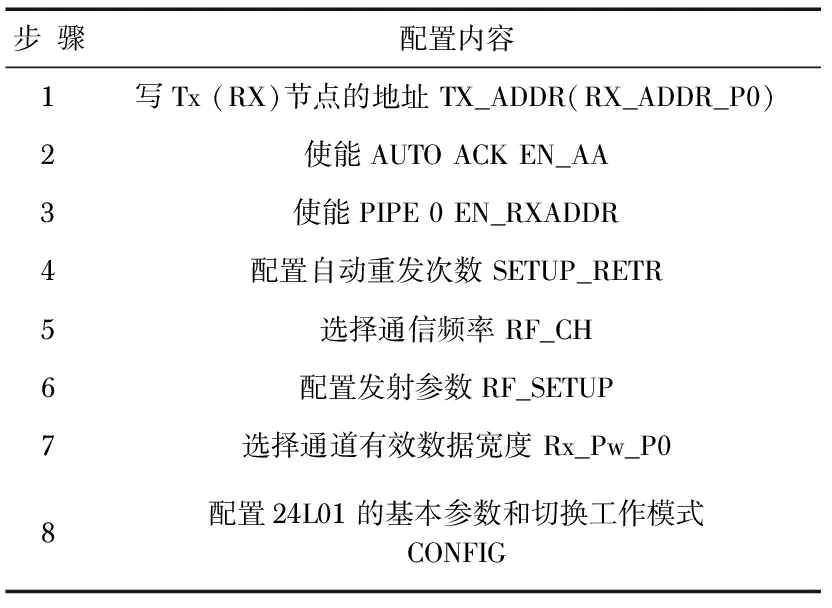
表1 nRF24L01配置步骤
3.3 MCU软件
系统上电后,初始化MCU;初始化nRF24L01,包括写发送地址(本地地址)及数据宽度、设置通道频率、使能自动重发、设置自动重发次数、使能接收等;初始化A/D转换相关参数。初始化结束后系统进入循环运行模式,首先采集A/D信号,使能nRF发送,如发送成功则进入下一次循环,发送不成功则进入自动重发,自动重发失败与成功都进入下一次循环,流程如图7。
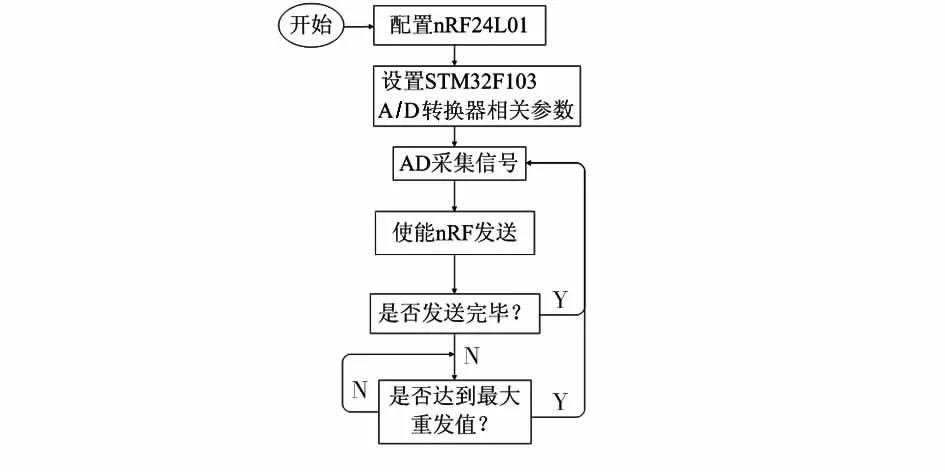
图7 主控芯片流程图
4 实验验证
为验证本设计的无线光电传感器的实用性与准确性,用一个激光平面发射器对设计的无线光电传感器进行测试,激光器转速为3 000 r/min,即激光扫描频率为50 Hz。
经过测试发现,AD采集与无线发送数据速度可达10 μs,即采集频率可高达100 kHz,无线发送模块nRF24L01在没有大型障碍物遮挡情况下发送距离可达50 m,外接增益天线后可具有一定的穿越障碍能力,可以满足吊装场合要求。测量距离与误差分析见图8,测量距离为4 m时最小可达0.25 mm,随后测量误差附着距离增大而增大,测量距离在11 m时测量误差为0.35 mm。这是因为当距离增大时,激光由于发散导致系统精度降低。

图8 测量距离与误差分析图
5 结 论
本文设计了基于STM32的无线光电传感器,利用硅光电池将激光信号转换为电流量,然后通过信号调整电路将其调整为可供采集的电压信号,利用STM32内部集成的A/D转换器采集并通过nRF24L01发送。通过测试发现,该无线光电传感器采集、发送数据周期最短可达10 μs,即采集频率可高达100 kHz,同时在外接增益天线后的nRF24L01的穿越障碍、发送距离以及误差等参数均满足吊装场合要求。
参考文献:
[1] Arc Second,Inc.Constellation-3D error budget and specifica-tion[R/OL].White paper 063102,[2002—01—10].http:∥www.arcsecond.com/PDFs/wp_Error_Budget.pdf.
[2] Arc Second,Inc.Constellation-3D indoor GPS for metrology[R/OL].White paper 071502,[2002—01—11].http:∥www1.cs.columbia.edu/~drexel/CandExam/ARCSecond_Indoor_GPS_Technology_for_Metrology.pdf.
[3] 乔勇惠.光电传感器原理及应用[J].可编程控制器与工厂自动化,2008(5):103-106.
[4] 李 娜,牛晓飞,许海峰,等.基于STM32的智能家居无线激光报警系统[J].激光杂志,2013,34(5):60-62.
[5] 袁开鸿,魏丽君,唐冬梅.基于STM32平台的CAN总线车载式漏电流数字传感器[J].传感器与微系统,2014,33(3):118-124.
[6] 赵 轩,马 建,曹仁磊,等.基于 nRF24L01 的无线式模型车运动状态监控系统[J].科技导报,2010,28(2):63-66.
[7] Johnson D E,Hilburn J L.有源滤波器的快速实用设计[M].北京:人民邮电出版社,1980:171-196.