超声波传感器在沙子料位检测中的应用*
2014-09-25曲春英
曲春英, 卞 之
(海南师范大学 物理与电子工程学院 自动化系, 海南 海口 571158)
0 引 言
在工程建筑行业,如果混凝土质量不过关,会存在重大的安全隐患。因此,在生产混凝土时,混凝土各组成物料的精确计量是混凝土质量的基本保证,为此,《GB 10172—1988混凝土搅拌站(楼)技术条件》对生产混凝土的搅拌设备规定了具体的计量精度要求[1]。而沙子是混凝土各组成物料之一,不言而喻,沙子的精确计量是保证混凝土质量的重要因素。
目前,砂石料的计量方式大都是称量式,此方法由于沙子含水量等问题,计量误差较大,且结构复杂、笨重[2]。而超声波系统具有精度高、恶劣环境适应能力强、设备轻便、安装与调试简单,易于读数和测量时不与被测介质直接接触等特点[3]。仅在物位测量方面,在多种物料中获得成功应用,例如:煤仓煤位监测和液位检测。
本文提出了一种新的容积法,即将超声波传感技术应用到混凝土搅拌设备中,对沙子料位进行连续计量,进而得出沙子的用量。
1 超声波测量沙子料位的理论依据
超声波测距有时间差法、相位法等,由于时间差法成本低、实现简单、应用的测距范围大,故本文选用该法。见图1,即将超声波发射端和接收端同时装在盛沙料斗顶部,发射端发出超声脉冲,遇到沙子界面反射回来,电子单元计算发射端发出信号和接收端收到信号的时间差t,得沙子界面到料斗顶部距离h=vt/2,进而得到料位L=H-h,其中,v为超声波在空气中的传播速度[4],L为料位高度,H为料斗高度 。
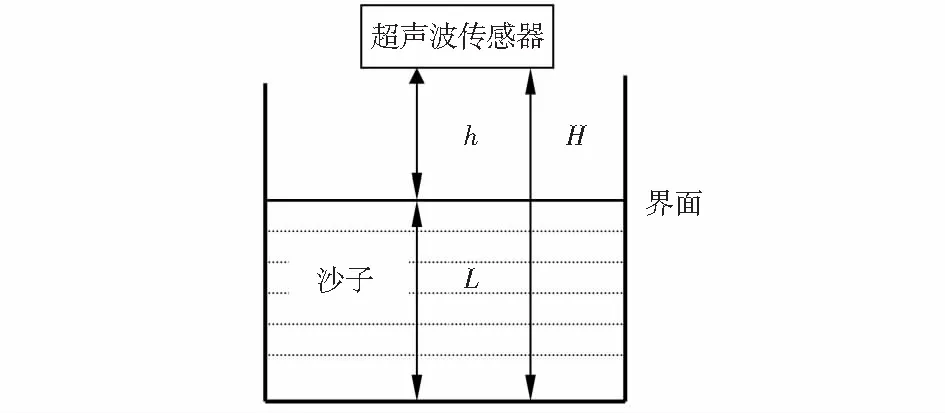
图1 超声波测料位示意图
2 提高整体精度关键
2.1 温度补偿设计
温度是影响超声波测量误差的一个主要原因,在空气中超声波传播速度因温度不同而不同,所以,在设计中需要温度传感器测出料斗上方环境温度,进行声速补偿。
经查资料,超声波声速与温度的关系v=331.45+0.607T(m/s),其中,v为补偿后的声速,T为料斗环境温度,℃[5]。
另外考虑到在实际应用中有时料斗较大,测量距离也较大,难于测量温度分布,此时可加装自动校准装置。需要注意校准装置的适当安装,避免校准回波和主回波混迭[6]。
2.2 自动增大回波幅值
虽然此系统用于料斗出料时测量沙子用量多少,可以避免超声波传感器受到测量方向上的阻碍物、测量介质堆积形状等的影响。但沙子界面凸凹不平,极为粗糙,反射波信号微弱,另外,远距离测量时回波也会减弱[7]。所以,在这里采用了自动增益控制电路,使接收回波的幅值基本保持不变,再通过整形电路输出,以提高测量精度[8]。
3 系统硬件设计
采用台湾华邦公司生产的高速单片机W77E58测量超声波的传播时间,测量分辨率为0.1 μs。环境温度20 ℃时超声波速度为343.6 m/s,1 mm距离的传播时间为2. 91 μs。因此,采用W77E58计时,完全可以保证1 mm的测量精度。测量沙子料位下位机系统设计见图2。
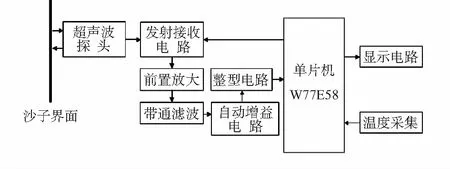
图2 系统设计框图
3.1 超声波发射与接收模块
超声波换能器种类繁多,有的要求被测物表面光滑、平整,有的盲区大,精度不高;综合考虑采用T/R40—16型收发分体式压电陶瓷超声波传感器,其工作电压是5 V,正常工作时电流为30 mA,最大电流是50 mA[9]。输入触发信号最小为10 μs TTL电平脉冲;回波信号为TTL电平正脉冲,脉宽与距离呈比例。它的声压能级、灵敏度在40 kHz时最大,测量距离2 cm~3 m,W77E58通过P1.0和P3.2控制T/R40—16。在TRIGGER引脚给T/R40—16一触发信号后,它将发射超声波。当超声波投射到物体而反射回来时,ECHO引脚输出一返回信号,给单片机一个中断,单片机开始读取测时时间,之后完成距离的计算。
3.2 测温模块
温度测量使用Dallas公司的数字型单总线温度传感器DS18B20设计,其占用单片机的资源少,读写操作方便。DS18B20测量范围是-55~+125 ℃,在-10~+85 ℃间,测量精度达±0.5 ℃,而在整个温度测量范围内具有±2 ℃的测量精度[10],最大转换时间为200 ms[11]。DS18B20采用+5 V电源供电,其数据总线DQ直接与W77E58的P3.1引脚相连。
3.3 自动增益控制模块
自动增益控制电路由放大器AD620,数字电位器MCP41100,通过单片机控制实现增益可调,见图3。

图3 自动增益控制电路
4 系统软件设计
主程序是整个控制系统的核心,通过调用模块子程序来驱动各个模块的硬件电路正常工作,以此来达到实时测量显示沙子料位的功能。实际中通过计算可以显示沙子用量多少,并加以控制。主程序流程图见图4,其中自动增益电路的软件实现采用逐步逼近的方法[12,13]。

图4 系统主程序流程图
5 实验结果
在实验室用了一个形状规则的圆筒作为模拟料斗进行多次测量,随着料斗不断地出料,显示器显示出了不同料位。
为了尽可能地减少测量误差,安装时传感器尽可能地与地面平行,且安装高度不能过低;为减小超声波旁瓣的影响,超声波传感器的2个探头之间的距离要大于3 cm,实验时距离为5 cm。在室温25 ℃的情况下,测量超声波探头到料面距离h数据见表1。
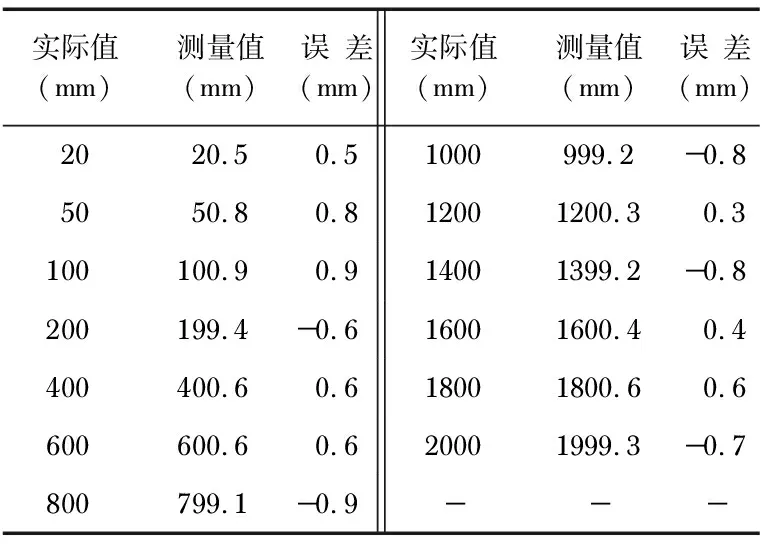
表1 超声波探头到料面距离h数据与误差
通过实验可得,此系统测得距离h精度达到1 mm,且重复性好。20 mm以内为测量盲区,相对较小。
显然,料位高度L乘以料斗有效面积S得到沙子的体积V,沙子的体积乘以沙子的密度即得到料斗内沙子质量G。所以,既可以通过计算机监控料斗内沙量剩余多少,也可以通过计算监控沙子用料多少,进而实现各种场合中沙子的精确配比。
6 结束语
1)本文设计了一基于超声波传感器的测距系统,用于沙子料位的连续测量;采用了高速单片机自动增益电路。经过测试,系统精度较高,测量误差达到了mm级。该系统还可与上位机进行通信,扩展成具有存贮、打印输出、越位报警等各种功能。
2)此料位测量系统适用于大多数固体料位,如水泥和谷类等极干燥和多尘的材料,甚至动态条件下的料位测量。
3)为进一步提高精度,应考虑环境的湿度,因为超声波在液体和固体中的传播速度更快;同时还应考虑基准误差,实际测量距离应当是压电晶片到障碍物之间的距离,由于压电晶片在探头内部,导致了基准的误差[14]。
参考文献:
[1] 吴康雄,李自光,陈 颖.基于电容传感原理的低成本砂石计量技术[J].中国工程机械学报,2006,4(1):102-105.
[2] 刘 伟.连续式沥青混合料搅拌设备的计量控制[J].建筑机械化,2004(8):68-70.
[3] 贾伯年,俞 朴,宋爱国.传感器技术[M].南京:东南大学出版社,2000.
[4] 张攀峰,王玉萍,张 健,等.带有温度补偿的超声波测距仪的设计[J].计算机测量与控制,2012,20(6):1717-1732.
[5] 时 玮,孟 军,刘 波.温度修正的超声波测距控制设计[J].机械工程与自动化,2005(6):85-87.
[6] 贺桂芳.一种高精度超声波测距系统的设计[J].传感器与微系统,2010,29(4):111-113.
[7] Wang Jinjin,Yuan Dong,Cai Ping.Range resolution of ultrasonic distance measurement using single bit cross correlation for robot-s[C]∥International Conference on Information,2010:917-923.
[8] Yamashita K,Katata H,Okuyama M,et al.Arrayed ultrasonic microsensors with high drectivity for in-air use using PZT thin film on silicon diaphrams[J].Sensors and Actuators A:Physical,2002,97/98:302-307.
[9] 渠笑纳.超声波测距在泊车辅助系统中的应用[D].大连:大连理工大学,2010.
[10] 张淑清,靳世久,李 隽.提高超声波物位检测精度方法的研究[J].传感技术学报,2007(7):1652-1654.
[11] 朱向庆,陈志雄.带温度补偿的360°超声波测距测速系统设计[J].压电与声光,2011,33(2):315-319.
[12] Huang Kenung,Huang Yupei.Multiple-frequency ultrasonic distance measurement using direct digital frequency synthesizer-s[J].Sensors and Actuators A,2009,149:42-45.
[13] 邹 轶.近距离高精度超声测距系统的设计[D].大连:大连理工大学.2009.
[14] 杨辉媛,涂成军,谭伟杰.超声波测距系统的设计[J].重庆科技学院学报:自然科学版,2009,11(3):163-166.