基于前馈解耦的三相逆变器双环控制器设计
2014-09-21杨光明王俊炎
杨光明,王俊炎
(海军驻武汉四三八厂军事代表室,武汉 430060)
0 引言
传统的PWM逆变器电压电流环控制通过采用输出电压有效值外环维持输出电压有效值的恒定[1]。这种控制方式一般只能保证输出电压有效值恒定不能保证输出电压的波形质量,特别是在非线性负载条件下输出电压谐波含量大,波形严重失真;另一方面,电压有效值外环控制的动态响应过程十分缓慢,在突加、突减负载时输出波形波动大,恢复时间一般需要几个甚至几十个基波周期[2]。
为了提高供电系统的稳定性和供电质量,研究开发应用高性能PWM逆变电源备受关注[4,5]。电压外环电流内环的双环控制方案是高性能逆变电源的发展方向之一,本文采用标幺值法和前馈解耦的双环控制策略,扩大了逆变器控制系统电流内环的带宽,使得逆变器动态响应加快,非线性负载适应能力加强,输出电压的谐波含量减小。
1 双环控制器原理分析
逆变器的双环控制分两类:一类是以滤波电容电流为内环被控量的电容电流内环电压外环控制,一类是以滤波电感电流为内环被控量的电感电流内环电压外环控制。如果在电容电流内环电压外环控制系统中增加电流限幅环节,只能限制电容电流大小,负载电流和电感电流完全不受其约束,不能通过限流实施对逆变电源的保护。因此,对逆变器的双环控制选择电感电流内环电压外环控制方式。
1.1 三相逆变器的双环控制
从图1所示的LC滤波器的在dq坐标系下的数学模型可以看出,旋转3/2变换在系统的d轴和q轴之间引入了强耦合,系统d,q轴输出电流imd,imq除受控制量vd和vq影响外,还受耦合电压ωbLmimq、-ωbLmimd扰动和输出电压vfd,vfq扰动的影响。同理,系统d,q轴输出电压vfd,vfq除受输出电流imd,imq控制外,还受耦合电流ωbCfvfq、-ωbCfvfd和输出负载电流igd,igq的扰动影响[5]。因此,如果不对d轴和q轴进行解耦控制,采用电流闭环控制时d轴和q轴的电流指令跟踪效果不是很理想。

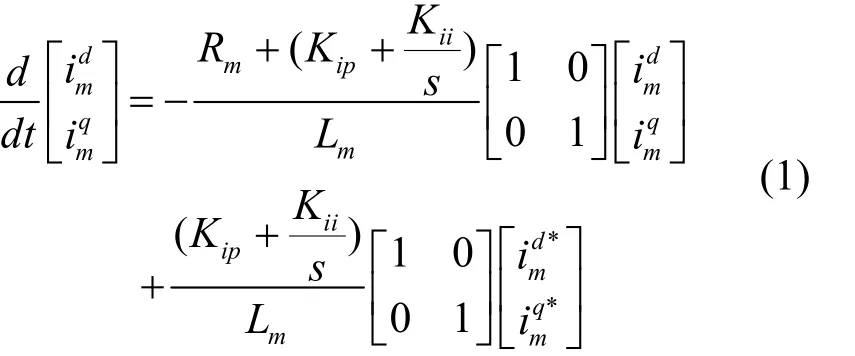
为此采用前馈解耦控制策略,当电感电流内环采用PI调节时,状态方程为:
当电容电压外环环采用 PI调节时,状态方程为:

由式(2)可以看出,基于前馈的控制算法使的三相逆变器vfd,vfq实现了解耦控制,控制结构如图3所示:

由式(1)可以看出,基于前馈的控制算法使的三相逆变器内环imd,imq实现了解耦控制,控制结构如图2所示:

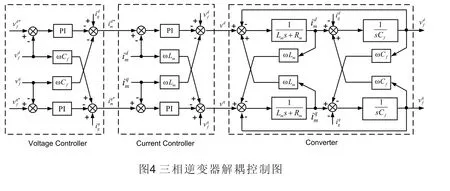
由式(1)、(2)可以看出,基于前馈的控制算法使的三相逆变器实现了解耦控制,整体控制结构如图4所示:
2 双环控制器设计
采用双环控制的逆变器电路结构控制框图如图5所示,假设主电路实际系统参数为:Lm=125μH;Cf=125μF;Rm=2mΩ;Ts为采样周期(即亦为PWM开关周期);KPWM为逆变桥PWM等效增益,dq坐标系下KPWM=Vdc=710;Kc=1/Ibase=1/1148为电流采样变比;Kv=1/Vbase=1/326为电压采样变比;α为负载电流前馈解耦系数;β为电容电压前馈解耦系数。

Rm的确定由实验中实测得到。假定逆变器实测效率为94%,则有功损耗占输出功率的5%,即

设计中 Lm= 1 25 μH ,解得Rm= 2 mΩ 。
下面讨论前馈解耦问题。
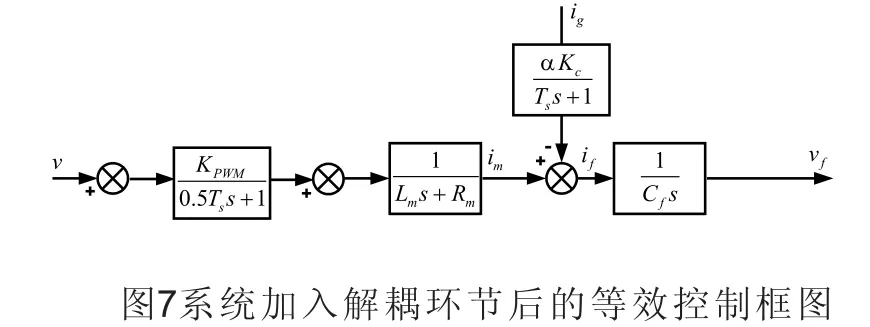
在设计控制器的过程中,考虑了逆变器的数学模型Kpwm/(0.5Tss+1)环节。设定直流母线电压Vdc=710 V , 则Kpwm=Vdc/√3=409.9Vdc, 取β=326/409.9。下面讨论在加入逆变器的数学模型Kpwm/(0.5Tss+1)环节后,β=0.8时,电容电压正反馈的完全解耦问题。为讨论方便,不考虑电流和电压环,实际系统加入解耦后的框图如图6所示:

对应传递函数为:

而在完全解耦的前提下,理想的控制框图如图8所示:
对应传递函数为:

针对图6与图7所示框图画出其伯德图如图8所示:图中线1为与图6所对应的伯德图,线2为与图7所对应的伯德图。可以看出加入解耦后,实际设计系统的伯德图与理想情况完全解耦后的伯德图在中高频率段完全重合,因此本文忽略了两者在高频段的差异,在后续设计中,按照完全解耦的情况进行控制器的设计。

在理论上可以完全消除负载扰动电流ig对输出电压Vf的干扰,实现完全前馈补偿,考虑到环节在实际中难以实现,为简单起见和易于实现,通常近似取α=1。此时的控制效果即相当于电流内环取电容电流为反馈量,但通过对电感电流指令进行限幅,仍然可以实现软件限流功能。至此讨论了前馈解耦问题,确定了前馈解耦系数,画出全系统框图如图9所示。


3 控制器参数设计及性能分析(电流内环设计)
为简化分析,将PI调节器传递函数写成零极点的形式,即:

由于采样保持环节的存在,给反馈信号带来了延迟,为了平衡这一延迟,在给定信号通道中,加入相同的延迟环节,进行滞后校正。实际上就是要求反馈电流信号检测和无功指令电流信号检测相一致将小时间常数0.5Ts、Ts合并,得简化的电流内环结构,如图10所示。

当考虑电流内环需获得较快的电流跟随性能时,可按典型 I型系统设计电流调节器,从图 10可以看出,只需要以PI调节器零点抵消电流控制对象传递函数的极点即可,即τi=Lm/Rm。校正后,电流内环的传递函数为:
由典型 I型系统参数整定关系,当取阻尼比ξc=0.707时,
求解得

式(9)即为电流内环PI调节器控制参数计算公式。
电流内环闭环传递函数为

当开关频率足够高,即Ts足够小时,由于s2项系数远小于s项系数,因此s2项可以忽略,则Wci可以简化成
当电流内环按照典型 I型系统设计时,电流内环可近似等效成一个惯性环节,其惯性时间常数为3Ts。显然,当开关频率足够高时,电流内环具有较快的动态响应。当闭环系统的闭环增益减少至-3 dB或者其相位移为-45°时,该点频率可定义为闭环系统频带宽度fb。对于按照典型I型系统设计的三相逆变器系统,由于电流内环可以等效成一阶惯性环节,因而电流内环频带宽度

电流内环开环系统的伯德图,如图11所示。在伯德图上,用来衡量系统稳定程度的指标是相角裕度Pm和以分贝表示的幅值裕度Gm。一般要求Pm=30°~60°,Gm>6 dB,可见,电流内环满足稳态指标。

电流内环闭环系统阶跃响应图如图12所示。可以看出,电流内环闭环系统稳定,响应速度快。

4 结论
本文基于前馈解耦控制策略对三相逆变器的双环控制方法进行了分析,详细阐述了前馈解耦双环控制中电流内环和电压外环的设计方法,并利用仿真对控制效果进行了分析。结果表明采用前馈解耦的双环控制策略,扩大了逆变器控制系统电流内环的带宽,使得系统动态响应加快,非线性负载适应能力加强,输出电压的谐波含量减小。
[1]彭力, 白丹, 康勇, 陈坚.三相逆变器不平衡抑制研究[J].中国电机工程学报, 2005, 24(5): 174-179.
[2]Yao Guijun, Phillips S, Norum L.Three-phase inverters-analysis of ability to maintain symmetrical output voltages [C].IEEE Proceeding of the IECON’ 93,November Maui, Hanaii, USA, 1993.
[3]姚志垒, 肖岚, 陈良亮.三相SVPWM并网逆变器的改进解耦控制方法[J].电力系统自动化, 2012, 36(20):99-103.
[4]陈江辉, 谢运祥, 黄敏俊, 明宗峰, 陈劲峰. 基于双环控制的Buck DC—AC逆变器[J].华南理工大学学报(自然科学版), 2009, 34(2):147-151.
[5]马莉, 周景海, 吕征宇.一种基于d-q变换的改进型谐波检测方案的研究[J].中国电机工程学报, 2000, 20(10):55-58.
[6]胡寿松. 自动控制原理[M]. 北京: 国防工业出版社,1994.