基于图像融合分割的实木地板表面缺陷检测方法
2014-09-20张怡卓许雷丁亮曹军
张怡卓, 许雷, 丁亮, 曹军
(1.东北林业大学 机电工程学院,黑龙江哈尔滨 150040;2.浙江大学 计算机科学与技术学院,浙江杭州 310058;3.东北林业大学理学院,黑龙江哈尔滨 150040)
其中,T1、T2为搜索邻域的阈值限定条件。
0 引言
实木地板表面缺陷直接影响着产品等级,基于计算机视觉的实木地板表面缺陷检测,对木质地板自动分选具有重要的现实应用意义[1-2]。
实木地板计算机视觉检测系统,首先由摄像头完成表面图像的信息采集;然后,运用分割算法检测表面缺陷区域;最后,应用分类算法对缺陷区域进行缺陷类别判断[3-5]。常用的颜色处理模型有RGB模型、HSV模型以及HSI模型[6];考虑到处理时间,作为面向硬件的RGB模型更为适用,前期试验研究实验表明R分量图像可有效抑制纹理噪声[7]。白雪冰、王林分别运用灰度-梯度共生矩阵和Gabor变换分割木材表面缺陷,这两种方法因计算量大导致分割速度较慢[8-9]。Du-Ming Tsai等利用小波变换分割物体表面缺陷,然而小波变换中没有基于邻界采样的滤波器组,而且重构之后还需对图像做进一步的处理[10-11]。应用数学形态学算法也可以对缺陷有效分割,但是形态学重构过程容易引入噪声[12]。陈永光利用分水岭算法分割木材表面缺陷,但方法对噪声极为敏感,易于产生过分割现象[13]。因此,如何对现有算法进行改进,以满足实木地板在线分选对分割速度和精确度有待进一步研究。
区域生长法是经典的图像分割算法,其思想简单、对具有清晰边缘的图像有较好的分割结果;但是简单的搜索八邻域会消耗大量的时间,且搜索时间和精确度受噪声影响[14-15]。因此,过滤图像噪声,完成种子点优选,制定快速搜索策略是亟待解决的关键问题。针对上述问题,提出一种基于图像融合的缺陷快速定位与禁忌快速搜索方法。方法通过对缺陷图像进行缩小,完成图像的去噪与缺陷的快速定位;然后,运用插值法对缩小图像进行原始图像规模的放大,通过对放大图像的缺陷边缘检测获得标记参考图像;最后,在标记图像作用下,对原图像边界进行禁忌搜索。
1 分选系统概述
实木地板缺陷检测的计算机视觉系统组成如图1所示。系统由传送平台、CCD摄像头、镜头、摄像头支架、光源系统、图像采集卡及缺陷检测软件组成。CCD摄像头为德国Oscar F810C IRF;为了提高图像采集的清晰度,选用两片LED平行光源对检测地板进行照明;采集的地板图像大小影响着图像处理时间与辨识效果,且二者是一对矛盾体,前期研究表明:在512×512,256×256和128×128三类图像中,256×256既能保证处理时间又能有效避免误识率[12],所以选用256×256的实木地板图像进行后期识别处理。
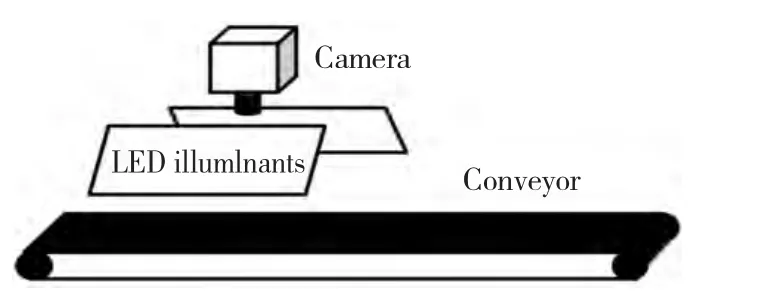
图1 实木缺陷检测的计算机视觉系统Fig.1 Computer vision system for defects detection of wood plates
2 基于图像融合的缺陷分割流程
参与缺陷分割的图像有两幅,第一幅图像是直接采集的实木地板表面缺陷图像;第二幅图像是由第一幅图像经过图像预处理、图像缩小、缺陷定位、图像放大、缺陷边缘检测所得到的标记图像。原始图像在标记图像作用下进行缺陷的边界搜索,完成缺陷的快速、完整分割。具体流程如图2所示。
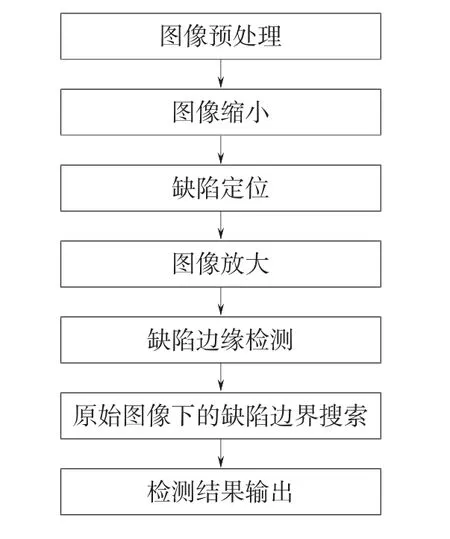
图2 实木地板缺陷分割流程Fig.2 Flow chart of wood plates defects segmentation
2.1 图像预处理
选用面向硬件设备的RGB颜色模型,由于R分量图像不仅对纹理有很好的去噪效果,而且R分量转换为灰度图像的时间较R、G、B模型要低[4],因此,在图像预处理部分,首先从RGB模型中提取R分量,然后进行灰度图像变换。
2.2 图像缩小与缺陷定位
由于噪声分布随机且面积小,图像缩小既可以实现缺陷粗定位又能够过滤噪声。选用等间隔采样完成图像缩小,若原图像中的点f0(x0,y0)在缩小后的图像中对应点f(x,y),则其中,kx、ky分别为x、y轴方向的缩放倍数。
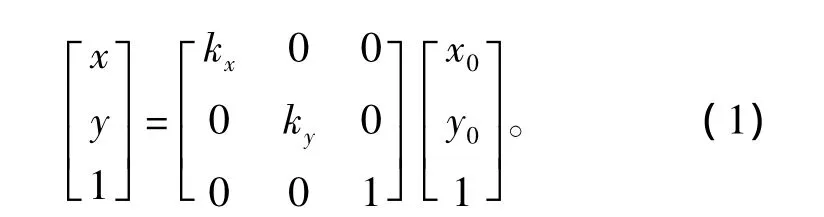
等间隔采样是通过提取子块中的一个像素点来代替整个子块,进而组合成一幅图像。设原图为f(x,y),缩小后的图像为g(x,y),则

如果在低维空间搜索缺陷点,计算量将为原来的1
kxk
,既提高运算速度,又减小图像分割时间。在低维空间搜索缺陷点,并将缺陷置“1”,完成缺陷的初步定位。
2.3 图像放大
图像放大是生成与原始图像大小一致的图像,为缺陷图像的融合分割提供标记图像。图像放大需要在处理效率与结果的平滑度和清晰度上做一个权衡。
梯度插值方法拥有较高的信噪比,且可以很好地保护图像边缘。采用差分算法在原始图像S(m,n)上计算每一点的梯度。在差分网格上,令网格点(i,j)处的梯度为

y
对于插值点(i,j),令在待插值点(i,j),令插值方向为左右方向,即按行插值。

2.4 创建标记图像
标记图像是针对原始图像的缺陷区域所创建的参考图像。对于原始输入大小为256×256的R分量图像I-im,定义Neighbor(I-im(x,y))为点I-im(x,y)的八邻域。对于图像中某一区域R,N(R)表示不属于R,但是又和R中某一像素相邻的集合:

定义标记图像Sign,其大小与原图像一致,满足式(7)、式(8),即
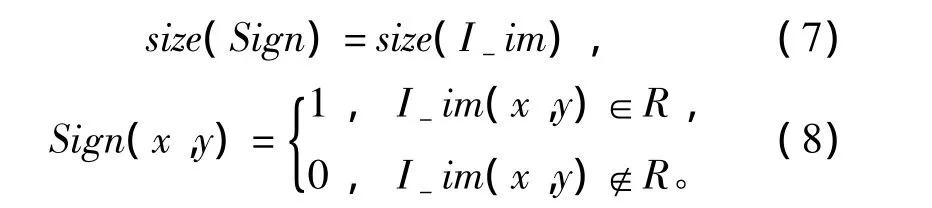
其中,size返回图像的大小。
如对于某个像素,满足点I-im(m,n)∈N(R)且I-im(m,n)∈Neighbor(I-im(i,j))要将I-im(m,n)合并到区域R中,必须满足条件

其中,T1、T2为搜索邻域的阈值限定条件。
2.5 缺陷的边缘检测
边缘检测是在标记图像上找到缺陷边缘,确定边缘种子点图像seed(x,y),原图像将以种子点进行向外搜索,进一步提高分割速度和精确度。
小波变换不但能够检测边缘,还可以将图像细节以不同程度的尺度呈现,从而实现多类型边缘的检测。
选取小波函数为

其中θ(x,y)≥0是光滑函数且满足:

二维图像f(x,y)所对应的小波变换为:
在尺度2j下,梯度的相角和模分别为
模M2jf(x,y)在φ2jf(x,y)方向的极值点对应图像的边缘点。
边缘检测的具体步骤为:
1)构造小波函数;
2)对图像f(x,y)做小波变换,计算模M2jf(x,y)与相角 φ2jf(x,y);
3)沿相角搜索模的极值点,生成图像的边缘P2jf(x,y);
4)将P2jf(x,y)中模、相角相似点连接,得到单像素的图像边缘D2jf(x,y);
5)对D2jf(x,y)中的边缘,计算P2j-1f(x,y)中的匹配区域,得到下一尺度j-1的边缘图像D2j-1f(x,y)。
2.6 边缘的禁忌搜索
禁忌搜索是参照标记图像Sign(x,y),从种子点seed(x,y)出发,利用阈值限定生长条件,避开标记点向外搜索缺陷边界,直到缺陷分割完成。
基于图像融合的缺陷分割过程的示意如图3所示。A图是标记图像,黑色部分为标记位置,B图为原始图像,C图表明标记缺陷小于实际缺陷。将C图虚线框放大,如D图所示。D图中的黑点是提取的种子点,a环表示标记图像边缘,b环表示缺陷边界。
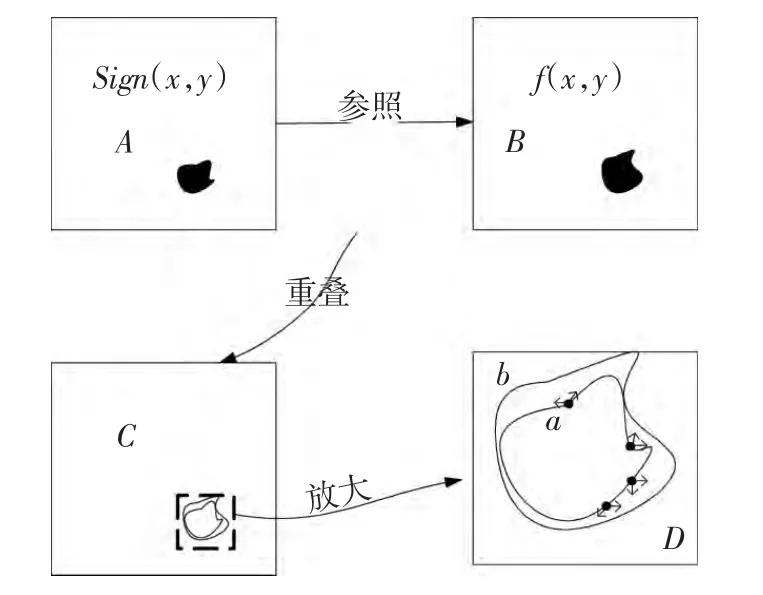
图3 基于图像融合的缺陷分割过程的示意Fig.3 The diagram of defects segmenting
3 实验结果与分析
3.1 实例说明
图像处理平台为MATLAB 2011b,采用32位PC机,其主频2GHz,内存2G。实验分割步骤如图4所示,(a)图是大小为256×256的原始R分量图像,对其均匀采样得到低分辨率图像(b),其大小为32×32;在低维空间搜索缺陷点,得到图(c);然后将其映射到256×256的高维空间,利用形态学方法腐蚀完成缺陷定位,如图(d)所示;提取缺陷边缘点为种子点,如图(e)所示,由种子点出发向边缘进行禁忌搜索完成缺陷的分割,分割结果如图(f)所示。表1是各个步骤CPU耗用时间,总消耗时间为12.006 ms。

图4 分割步骤Fig.4 Segmentation steps
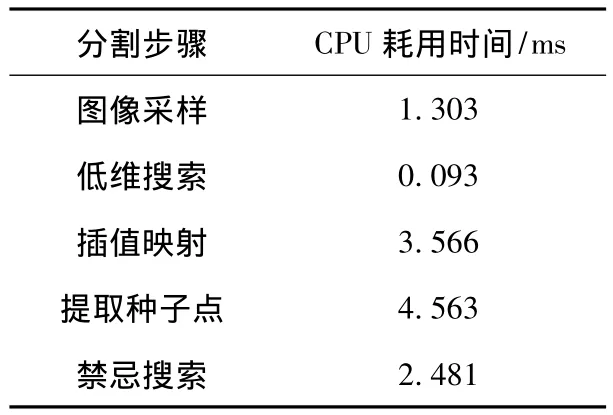
表1 各分割步骤耗用时间Table 1 Elapsed time of each step
3.2 噪声实验分析
运用区域生长方法对图4(a)进行分割,分割结果如图5(b)所示。区域生长算法虽然可以完整分割出节子,但受纹理噪声的干扰,图中圆圈内部为误分割的噪声区域。区域生长算法与本方法的分割参数如表2所示,计算面积时可以将分割结果的缺陷部分标记为‘1’,面积计算公式(16)为

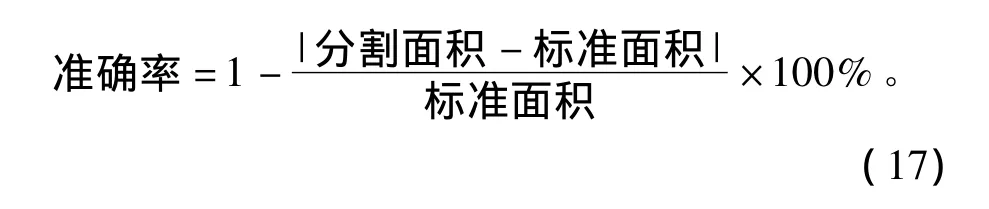
其中,R是像素为1的点的坐标。准确率计算公式为其中,标准面积由人为勾勒缺陷区域得到,图4(a)的标准缺陷面积为698。分割结果表明,本方法的分割准确率明显优于区域生长方法。

图5 两种算法分割结果Fig.5 Segmenting results by two algorithms

表2 传统方法与本文方法分割结果对比Table 2 Comparison of segmentation results by traditional methods and the proposed methods
图6是应用本文所提算法分别就实木地板中常见的活节、死节和裂纹进行的分割检测试验。对20幅样本图像进行分割实验,该方法对缺陷区域的平均分割准确率达到96.8%,而传统方法仅为84.4%.
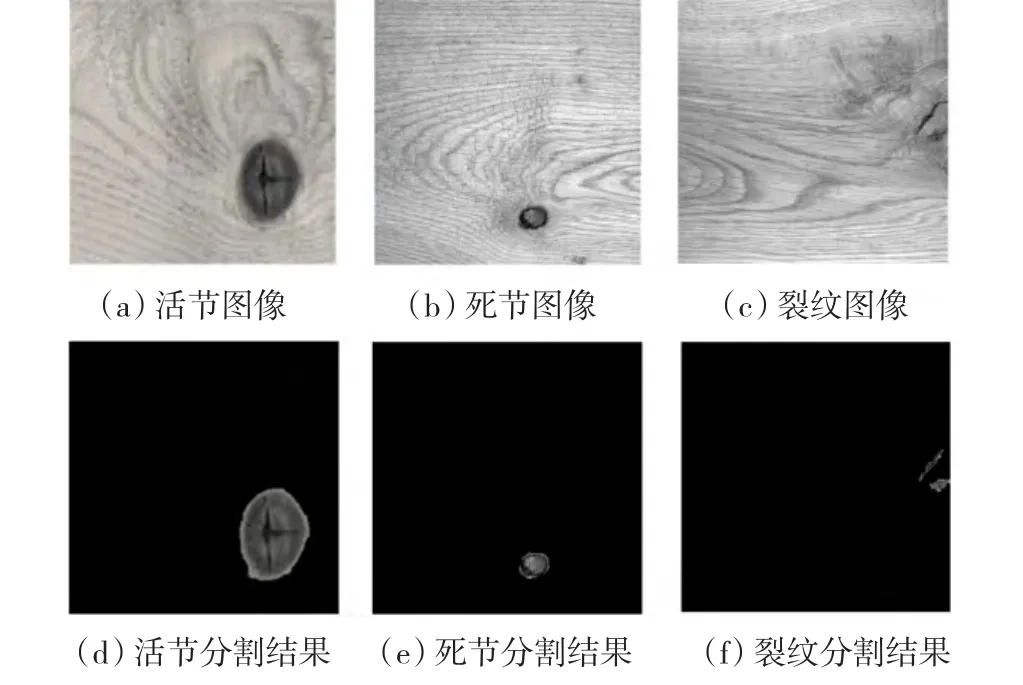
图6 部分样本分割结果Fig.6 Segmentation results of part of sample images
值得说明的是,在通过图像缩放虽然可以实现缺陷的快速定位,但是会丢失图像的部分信息。由于实验中每隔8个像素点采一次样,因此当缺陷的面积小于8×8个像素点时将很难采样到缺陷点。如图7是对较小缺陷的分割结果,(a)图是原始的R分量图像,(b)图是分割结果,可以看出(a)图红色圆圈内圈起来的3个小虫眼并没有被分割出来,其主要原因就是在采样时丢失了它们的信息。

图7 小缺陷分割结果Fig.7 Segmenting results of small defects
3.3 分割时间分析
针对图4(a)的分割时间进行了记录与比较,时间对比如表3所示。图8是两种方法搜索的区域面积随时间变化的曲线。虚线是基于图像融合分割的时间曲线。其中2~5 ms内,是低维空间向高维空间插值映射过程;5~10 ms内完成种子点提取;10~12 ms内进行缺陷边缘细搜索。实线是区域生长的分割时间曲线,10 ms左右的波谷是过滤噪声、优选种子点引起的。对20幅样本图像进行分割实验,该方法平均分割时间为13.21 ms。

表3 两种算法时间对比Table 3 Elapsed time of two methods

图8 区域面积随时间变化曲线Fig.8 Area of versus time
4 结语
针对于区域生长算法存在的分割速度慢、分割不准确的问题,提出了基于图像融合的缺陷定位方法,方法通过图像缩放实现了缺陷快速定位的同时有效克服了噪声干扰;运用小波变换有效的提取了缺陷边缘,通过对边缘制定的禁忌搜索策略,完成了缺陷精确分割。缺陷分割的时间、精确度和抗扰能力明显优于区域生长方法。
[1]RUZA Gonzalo A,PABLO A Estevez,PABLO A Ramirez.Automated visual inspection system for wood defect classification using computational intelligence techniques[J].International Journal of Systems Science,2009,40(2):163-172.
[2]PHAM D T,ALCOCK R J.Automated grading and defect detection:A Review[J].Forest Products Journal,1998,48(3):34-42.
[3]IRENE Y H G,RAUL Vicen.Automatic classification of wood defects using support vector machines[C]//International Conference of Computer Vision and Graphics,November 10-12,2008,Warsaw,Poland.2008:356-367.
[4]PHAM D T,ALCOCK R J.Automated visual inspection of wood boards:selection of features for defect classification by a neural network[J].Journal of Process Mechanical Engineering,1999,213(4):231-245.
[5]RUZA Gonzalo A,PABLO A Estévez,PEREZ Claudio.A neurofuzzy color image segmentation method for wood surface defect detection[J].Forest Products Journal,2005,55(4):52-58.
[6]OLLI Silven,MATTI Niskanen,HANNU Kauppinen.Wood inspection with non-supervised clustering[J].Machine Vision and Applications,2003 13(2):275-285.
[7]ZHANG Yizhuo,TONG Chuan,Wood board defects sorting based on method of possibilistic C-means improved support vector data description.Applied Mechanics and Materials,2012,128-129:1288-1291.
[8]白雪冰,邹丽晖.基于灰度-梯度共生矩阵的木材表面缺陷分割方法[J].森林工程,2007,23(2):16-18.
BAI Xuebing,ZOU Lihui.Segmentation method of timber surface defects based on gray level-gradient Co-occurrence matrix[J].Forest Engineering,2007,23(2):16-18.
[9]王林,白雪冰.基于Gabor变换木材表面缺陷图像分割方法[J].计算机工程与设计.2010,31(5):1066-1069.
WANG Lin,BAI Xuebing.Image segmentation method of surface defects of wood based on Gabor transform[J].Computer Engineering and Design,2010,31(5):1066-1069.
[10]TSAI Duming,BO Hsiao.Automatic surface inspection using wavelet reconstruction[J].Pattern Recognition,2001,34(6):1285-1305.
[11]HAN Yanfang,SHI Pengfei.An adaptive level-selecting wavelet transform for texture defect detection[J].Image and Vision Computing,2007,25(8):1239-1248.
[12]张怡卓,佟川,于慧伶.基于形态学重构的实木地板缺陷分割方法研究.森林工程[J].2012,28(2):14-17.
ZHANG Yizhuo,TONG Chuan,YU Huiling.Research on wood floor defects segmentation based on morphological reconstruction[J].Forest Engineering,2012,28(2):14-17.
[13]陈永光,王国柱,撒潮,等.木材表面缺陷边缘形态检测算法的研究[J].木材加工机械.2003,3:18-22.
CHEN Yongguang,WANG Guozhu,SA Chao,et al.A study of morphology arithmetic for lumber surface defects’edge detection[J].Wood Processing Machinery,2003,3:18-22.
[14]金立生,王荣本,高龙,等.基于区域生长的智能车辆阴影路径图像分割方法[J].吉林大学学报:工学版,2006,36:132-135.
JIN Lisheng,WANG Rongben,GAO Long,et al.Shadow path mark segmentation method based on region growing for intelligent vehicle[J].Journal of Jilin University:Engineering and Technology Edition.2006,36:132-135.
[15]FRANK Y Shih,CHENG Shouxian.Automatic seeded region growing for color image segmentation[J].Image and Vision Computing,2005,23(5)877-886.
[16]尹奎英,刘宏伟,金林.快速的Otsu双阈值SAR图像分割法[J].吉林大学学报:工学版,2011,41(6):1760-1765.
YIN Kuiying,LIU Hongwei,JIN Lin.Fast SAR image segmentation method based on Otsu adaptive double threshold[J].Journal of Jilin University:Engineering and Technology Edition,2011,41(6):1760-1765.