变频空调驱动电机的弱磁控制
2014-09-20陈宁张跃桂卫华喻寿益
陈宁, 张跃, 桂卫华, 喻寿益
(中南大学信息科学与工程学院,湖南长沙 410083)
对永磁转矩分量进行变换得到
0 引言
由于宽调速范围要求,内埋式永磁同步电机的弱磁控制日益受到人们的关注[1],IPMSM以其高功率密度、高功率因数、结构紧凑、调速范围宽等优点,广泛应用于变频空调、机床、机器人等数控系统[2]。PMSM的转子励磁磁场由永磁体产生,无法在高速下进行恒功率运行。即使是由正弦波PWM逆变器驱动,利用电流相位角削弱永磁场的PMSM,高速下的输出功率也会随着速度的增加而迅速下降,无法获得较宽的高速恒功率调速范围。这一缺陷严重限制了扩展PMSM的高速应用范围,扩大其恒功率弱磁运行能力,已经成为变频空调领域研究中的一个重要课题。
弱磁控制使电机能够在逆变器容量不变的情况下提高系统的最高速度运行能力;在最大调速范围不变的条件下,降低电机的额定容量和逆变器容量[3-6]。文献[7]提出了弱磁控制的公式计算法,它完全依赖于电机数学模型,只具有理论研究意义,很少在实际工程中直接应用。文献[8]提出了查表法,查表法依赖大量的实验数据,实现起来较为复杂。文献[9-10]提出了利用电压极限椭圆的梯度下降法,但是此方法弱磁调速区域的确定需要计算恒转矩曲线和电压极限椭圆的夹角,计算量大,实现较复杂。文献[11]提出了负d轴电流补偿法,从数字化控制系统的特点入手,分析了电流失控的原因,利用限幅后的负d轴电流进行弱磁控制,当d轴电流饱和后对q轴电流进行弱磁补偿,达到了一定的弱磁扩速效果,但是在电机高速运行时损失了较大的电磁转矩。
本文基于无位置传感器控制系统,提出一种利用q轴电压来调节d轴电流设定值的弱磁控制方法,对d轴电流设定值进行改进的控制方法,该方法控制精度高,鲁棒性好。
1 IPMSM的数学模型
IPMSM的矢量控制基于转子磁场定向的旋转两相d-q坐标系,在此坐标系下建立IPMSM的数学模型是最简单有效的。IPMSM在定子两相旋转d-q坐标系下的电压方程为

其中:Ld,Lq分别为d,q轴电感;id,iq分别为d,q轴电流;ud,uq分别为d,q轴电压;rs为定子相电阻;ψf为转子永磁磁链;ωe为电角速度。
输出的电磁转矩方程为

其中,p为磁极对数。
2 弱磁运行区域分析
2.1 最大转矩电流比曲线
由于IPMSM的d轴电感小于q轴电感,负d轴电流可以增加磁阻转矩分量。最大转矩电流比(maximum torque per ampere,MTPA)控制算法[12-16]目的就是在基速以下的恒转矩区域内由给定的转矩控制使得定子电流幅值最小。

其中,λ为拉格朗日乘子。对式(3)求偏导并令其为零,可解得

式(4)体现在d-q坐标轴下是一条双曲线,如图1中AB曲线所示。这条曲线上的点在给定电流矢量的基础上能输出最大转矩。随着电机转速的升高,电机将沿着曲线BC和最大转矩电压比曲线MTPV运行。随着转速的升高,转矩的输出能力逐渐减小[17]。
2.2 电压极限环和电流极限环
由式(1)可知,当PMSM运行在稳定状态时,d-q坐标系下的电压方程可以表示为

考虑到逆变器的输出能力和电机的额定参数,定子电流Is和定子端电压Vs的约束方程为

其中:Ism为逆变器能承受电流的最大幅值;Vsm为逆变器输出电压的最大幅值。
通过控制d轴和q轴电枢电流,可以使得电机在基速以上恒功率弱磁区域运行时的定子端电压等于逆变器输出的极限电压,即Vs=Vsm。
如图1所示,在d-q平面上,电流约束方程是一个以Ism为半径的圆,圆心在(0,0)点。B点是电流极限圆和MTPA曲线的交叉点,电机电流指令工作在这一点的速度ωb就称为基速。

图1 IPMSM运行时电流、电压轨迹图Fig.1 Trajectory of current and voltage of IPMSM
此外,忽略定子电阻压降,由式(5)得到d轴电流id为
电压约束椭圆可以改写以成定子电流id和iq作为约束条件的不等式为

3 基于龙贝格观测器的弱磁控制
3.1 IPMSM龙贝格观测器的设计
IPMSM的磁场定向控制算法要求准确地获得转子磁场的角度与位置信息,以便达到精准控制。在无位置传感器控制方法中,提出一种基于龙贝格观测器[18]的α-β参考坐标系下的位置、速度的估算方法,观测器的输出就是转子电位置角θr以及转子机械转速ω,二者之间的关系为θr=pωt=ωet。在α-β坐标系下PMSM的数学模型为

式(10)可化简为

式中:状态变量x=[iαiβeαeβ]T;输入矢量u=[uαuβ]T;输出变量y=[iαiβ]T;A、Β、C分别为状态矩阵、输入矩阵及输出矩阵,表示为

其中:iα、iβ、uα、uβ分别为电机在静止坐标 α - β 系下的电流和电压;eα、eβ为反电动势状态变量;Ls为d轴电感Ld及q轴电感Lq的平均值,Ls=(Ld+Lq)/2。

图2 龙贝格观测器框图Fig.2 Block diagram of Luenberger observer
因此,所提出的龙贝格观测器可以写成^

化简得

将式(11)和式(13)作差可得误差状态向量的表达式为

估计得到反电动势eα,eβ后,利用下式便可准确估算出转子位置及速度为

3.2 IPMSM的弱磁控制算法
本文提出的控制方法的实际应用背景是变频空调压缩机驱动控制系统,对变频空调压缩机的控制要求算法简单、便于实现。建立基于龙贝格观测器的IPMSM弱磁算法控制系统模型,算法框图如图3所示。
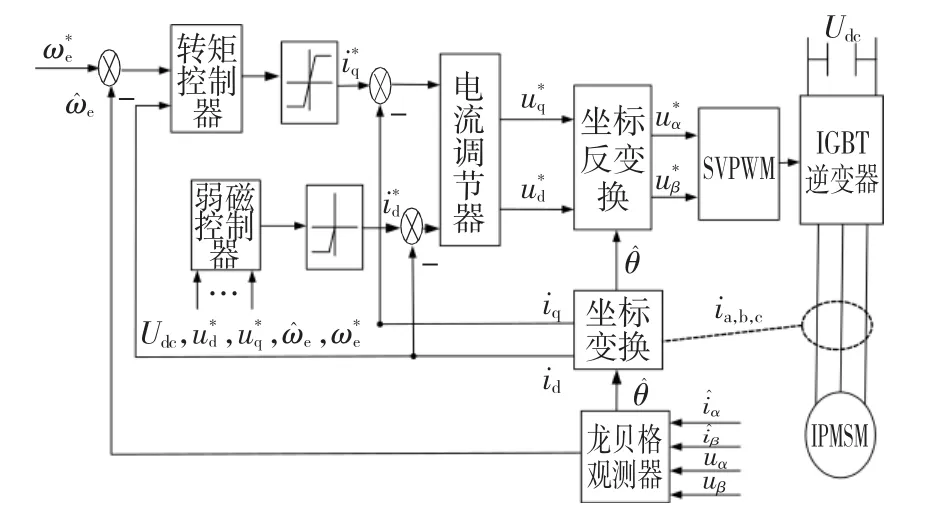
图3 IPMSM控制系统弱磁算法框图Fig.3 Block diagram of flux weakening method of IPMSM control system
图3所示为基于转子磁场定向矢量控制算法框图,电机在基速以下运行时,从转矩控制器的输出可以获得q轴电流设定值,而d轴电流设定值设为0;基速以上,反电动势的幅值会越来越接近逆变器输出的最大电压Vsm,为了减小定子绕组上反电动势的大小,需要获得一个负的弱磁电流id,它产生的磁场方向与转子永磁磁场方向相反。
式(8)表明:系统稳态时用q轴电压uq可以控制id。为了计算d轴电流设定值,在任意时刻须考虑q轴电压所能达到的最大值uqm,q轴电压最大值应受约束关系为
系统稳态时,q轴电压最大输出值uqm和重构设定值u*q可以分别写成
其中,ide为d轴电流误差,ide=-id。
q轴电压误差定义为

由式(17)~式(19),将q轴电压的输出最大值与重构设定值相减,求解可得到d轴电流设定值的误差信号为

对误差信号进行PI运算求得d轴电流设定值,推出d轴电流设定值可求得为


图4 弱磁控制器框图Fig.4 Block diagram of flux weakening controller

图4 为弱磁控制器的框图,将d轴电流id,速度设定值与速度反馈值,直流母线电压Udc,d轴电压参考值,q轴电压参考值,作为弱磁控制器的输入,控制器输出经过限幅环节得到d轴电流设定值。速度误差Δω=-及d轴电流作为转矩控制器的输入,速度误差信号的PI运算可得转矩参考值,控制器输出得到q轴电流设定值。在d轴电流不为零的情况下,利用转矩解耦方法,式(2)输出的电磁转矩可分为永磁转矩分量Teψ和磁阻分量Ter,其中
对永磁转矩分量进行变换得到

由式(22)、式(23)解得


本文设计的弱磁控制器可以通过利用电压误差uqe实现对弱磁电流的控制,当弱磁控制器收敛时,定子电压幅值接近母线电压所能提供电压的极限值Vsm,实现了对母线电压的充分利用。
4 系统实验及结果分析
4.1 系统仿真实验
为验证基于龙贝格观测器的内埋式永磁同步电弱磁控制方法的准确性,用Matlab/SIMULINK仿真软件对算法进行仿真验证。电机参数为:电机极对数p=3,单相绕组rs=0.49 Ω,d轴电感Ld=6.5 mH;q轴电感Lq=11.8 mH;感应电压常数为Ke=26.9 V/(1 000 r·min-1);转矩常数为Kt=0.474;转动惯量为J=0.000 63 kg·m2;额定转速为1 000 r·min-1;PI控制参数为Kp=7.5,Ki=0.001。

图5 转速上升、转矩阶跃变化时转速、电流的响应曲线Fig.5 Speed,current response curve when speed rise and torque step
图5为驱动电机速度从0加至1 000 r·min-1,1.2 s之后继续升速到2600 r·min-1,3.15 s时负载转矩从1 N·m加倍后d轴与q轴电流的响应波形,由图5(a)可知在给定转速的条件下,电机转速响应良好。由于负载转矩的突然加倍,而闭环系统输出力矩的调节需要一定的响应时间,所以在负载转矩加倍后的0.15 s内速度有短暂地波动,波动幅度小于50 r·min-1,控制算法对负载大幅突变有较好的稳定性;驱动电机先采用MTPA控制后引入弱磁控制,由图5(b)、(c)知1.2 s以后,d轴电流负向变大,q轴电流也适当地减小;当负载转矩在3.15 s时刻翻倍之后,为了保持驱动电机的平稳运行,d轴与q轴电流模值也变大。
4.2 系统实验平台开发
控制系统用一台1.5匹变频空调压缩机驱动电机电机作为实验对象。压缩机额定转速4500 r·min-1,其他参数同4.1节,控制系统实验平台整体设计如图6所示。实验平台的硬件主要包括主电路电源及电机控制单元、检测与通信电路、控制电路(以意法半导体公司的32位ARM芯片STM32F103R8T6为核心、逆变器采用功率集成模块TGF7NC60HD)等;工作台由计算机、数字示波器、接线板等构成。软件开发环境为IAR Systems公司开发的一个集成开发环境(IAR EWARM),采用C语言编写软件,功能上实现了对变频空调压缩机驱动电机的弱磁调速控制。

图6 基于ARM的变频空调用永磁同步电机弱磁控制系统实验平台Fig.6 Flux weakening control system experimental platform of IPMSM for air conditioner based on ARM
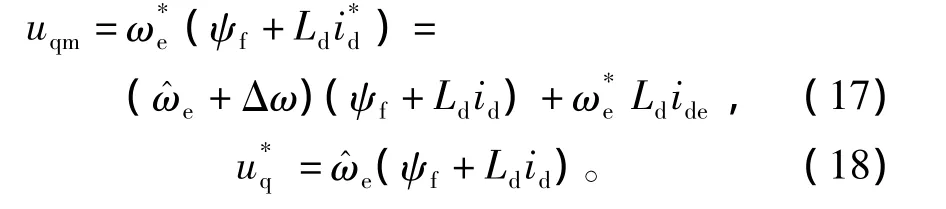
实验中AD采样频率为1 kHz,每个变量采集10 000个数据,实验结果的d轴电流、q轴电流、输出转矩、相电流波形如图7~图10所示。
从图7和图8可知,在最大转矩电流比控制下的d轴电流为-1.9 A,q轴电流为10 A,此时能输出最大转矩;5 s之后开始弱磁控制,随着速度的升高,d轴电流分量迅速变大,达到-6.2 A,弱磁能力较强,q轴电流相应减小。由图9为输出转矩曲线,随着弱磁强度的增加,输出转矩也随之减小,最终输出转矩稳定在约1.95 N·m。图10表明对于基于龙贝格观测器的驱动电机在逆变器容量不变的情况下变频空调可高频稳定运行并且位置观测正确。

图7 d轴电流曲线Fig.7 Current curve of d-axis
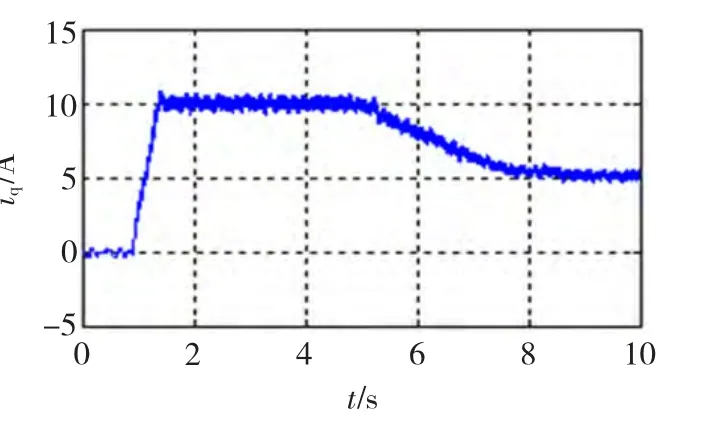
图8 q轴电流曲线Fig.8 Current curve of q-axis

图9 转矩变化曲线Fig.9 Torque change curve
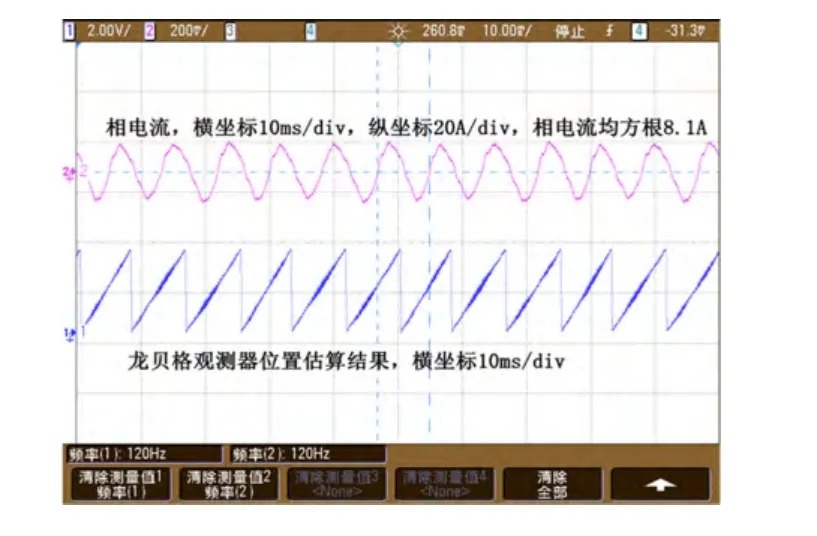
图10 变频空调120 Hz运行时相电流波形Fig.10 Phase current waveform when inverter air-condition running in 120 Hz
5 结语
针对变频空调压缩机驱动电机的无位置传感器控制系统,本文提出了一种基于电机转速和q轴电压的弱磁控制方法。在电机低速运行时,采用最大转矩电流比控制,以产生最大转矩;弱磁运行时,采用本文提出的弱磁算法曲线运行,通过调节弱磁控制器的PI参数,使电机在高速时稳定运行。该算法实时性能好,算法简单,进一步优化转矩脉动问题后,可在变频空调等领域推广及产业化。
[1]唐任远.现代永磁同步电机理论与设计[M].北京:机械工业出版社,1997:263-352.
[2]唐朝晖,丁强,喻寿益,等.内埋式永磁同步电机的弱磁控制策略[J].电机与控制学报,2010,14(5):68-72.
TANG Zhaohui,DING Qiang,YU Shouyi,et al.Research of flux weakening strategy of interior permanent magnet synchronous motor[J].Journal of Electric Machines and Control,2010,14(5):68-72.
[3]陈书锦,杨帅,杜煦.永磁同步电动机弱磁运行控制研究[J].江苏科技大学学报:自然科学版,2010,6(24):576-580.
CHEN Shujin,YANG Shuai,DU Xu.Weak flux control for permanent magnet synchronous motor[J].Journal of Jiangsu University of Science and Technology:Natural Science Edition,2010,6(24):576-580.
[4]喻寿益,曾国庆,高金生,等.37kW异步电机交流调速试验平台的研究[J].中南大学学报:自然科学版,2009,40(4):980-985.
YU Shouyi,ZENG Guoqing,GAO Jinsheng,et al.37kW asynchronous motor AC speed regulation experimental platform[J].Journal of Central South University:Science and Technology:Natural Science Edition,2009,40(4):980-985.
[5]冯江华,桂卫华,徐俊峰.考虑参数变化的永磁同步电动机弱磁控制研究[J].微电机,2008,41(4):20-31.
FENG Jianghua,GUI Weihua,XU Junfeng.Flux-weakening control research of permanent magnet synchronous machines considering parameters variation[J].Micromotors,2008,41(4):20-31.
[6]盛义发,喻寿益,洪镇南.一种新颖的永磁同步电机直接转矩控制方法[C]//第27届中国控制会议.昆明:中国自动化学会控制理论专业委员会,2008:71-75.
[7]PAN Chingtsai,SUE Shinnming.A linear maximum torque per ampere control for IPMSM drive over full-speed range[J].IEEE Transactions on Energy Conversion,2005,20(2):359-366.
[8]LENKE R U,DE Doncker R W,KWAK Mushin,et al.Field weakening control of interior permanent magnet machine using improved current interpolation technique[C]//37th IEEE Power Electronics Specialists Conference,June 18-22,2006,Jeju,Korea.2006:1-5.
[9]盛义发,喻寿益,桂卫华,等.轨道车辆用永磁同步电机系统弱磁控制策略[J].中国电机工程学报,2010,30(9):74-79.SHENG Yifa,YU Shouyi,GUI Weihua,et al.Field weakening operation control strategies of permanent magnet synchronous motor for railway vehicles[J].Proceedings of the CSEE,2010,30(9):74-79.
[10]唐朝晖,丁强,喻寿益,等.表面贴装式永磁同步电机弱磁控制策略的研究[J].控制工程,2011,18(3):384-387.
TANG Zhaohui,DING Qiang,YU Shouyi,et al.Research of flux weakening strategy of an surface mounted permanent magnet synchronous motor[J].Control Engineering of China,2011,18(3):384-387.
[11]朱磊,温旭辉,赵峰,等.永磁同步电机弱磁失控机制及其应对策略研究[J].中国电机工程学报,2011,31(18):67-72.
ZHU Lei,WEN Xuhui,ZHAO Feng,et al.Control policies to prevent PMSMs from losing control under field-weakening operation[J].Proceedings of the CSEE,2011,31(18):67-72.
[12]窦汝振,温旭辉.永磁同步电动机直接转矩控制的弱磁运行分析[J].中国电机工程学报,2005,25(12):117-121.
DOU Ruzhen,WEN Xuhui.Analysis of field weakening operation for the direct torque control of PMSM[J].Proceedings of the CSEE,2005,25(12):117-121.
[13]SIMANEK J,NOVAK J,CERNY O,et al.FOC and flux weakening for traction drive with permanent magnet synchronous motor[C]//2008 IEEE International Symposium on Industrial Electronic,June 30-July 2,2008,Cambridge,UK.2008:753-758.
[14]KWON Taesuk,SUL Seungki.A novel flux weakening algorithm for surface mounted permanent magnet synchronous machines with infinite constant power speed ratio[C]//2007 International Conference on Electrical Machines and Systems,Oct 8-11,2007,Seoul,Korea.2007:440-445.
[15]成秋良,朱熀秋.无轴承永磁同步电机增磁调压转速控制策略[J].中国电机工程学报,2009,29(3):91-95.
CHENG Qiuliang ZHU Huangqiu.Speed control strategy of bearingless PMSM by means of voltage regulating under flux enhancing operation[J].Proceedings of the CSEE,2009,29(3):91-95.
[16]刘春光,臧克茂,马晓军.电传动装甲车辆用永磁同步电动机的弱磁控制算法[J].微特电机,2007,35(4):27-30.
LIU Chunguang,ZANG Kemao,MA Xiaojun.Research on fluxweakening control of PMSM for electric drive armored vehicle[J].Small&Special Electrical Machines,2007,35(4):27-30.
[17]冷再兴,马志源.一种新的内置式永磁同步电机弱磁调速控制方法[J].微电机,2006,39(6):11-14.
LENG Zaixing,MA Zhiyuan.Space vector field weaking control of IPMSM drives[J].Micromotors,2006,39(6):11-14.
[18]LAGRIOUI A,MAHMOUDI H.Speed and current control for the PMSM using a Luenberger observer[C]//2001 International Conference on Multimedia Computing and Systems,April 7-9,2011,Ouarzazate,Morocco.2011:1-6.