一种4自由度三指灵巧手的设计和运动学分析与仿真研究
2014-09-19李正祥钱瑞明
李正祥,钱瑞明
(东南大学机械工程学院,江苏 南京211189)
0 前言
随着机器人应用领域的不断扩大,用单自由度夹持器作为机器人的末端执行器来应对日益复杂的作业环境和任务已经显得捉襟见肘。多指灵巧手无疑可以满足现代工程实际应用中各种复杂工况对机器人的要求,然而目前问世的多指手大多以实现高灵巧性为目标,自由度和关节数多,结构复杂、控制繁琐,且成本高昂,难以广泛应用于实际。为解决多指手过度复杂的难题,国内外学者研制出了多款新概念的多指手。欠驱动拟人多指手[1-2]以较少的驱动器获得较多的关节自由度,降低了装置对控制系统的要求,但其抓取能力有限;基于轮椅平台用来辅助残疾人的多指手[3]可控性强,但对复杂外形物体的适应性较差;文献[4-5]介绍了一种抓取能力卓越又结构组成简易的欠驱动三指灵巧手,为多指手的研究提供了新颖的思路。
本文提出并设计了一种4自由度、8关节三指灵巧手结构方案,借助力矩转换器实现各手指内、外两关节的逻辑运动以及对物体的单指节或两指节接触夹持,通过三指相对位置的调整可实现对回转类、多面体类以及复杂曲面形状物体的可靠夹持。该三指手结构在功能性上比简单夹持器强大,在实用性上比多自由度灵巧手优越。结合三指手的具体结构,对其进行运动学分析与仿真研究,可以为控制和抓取规划等工作提供理论基础和依据。
1 三指灵巧手的结构组成和工作原理
图1为4自由度、8关节三指灵巧手的机械结构组成。手指1、2结构相同,各有3个转动关节,其中两指的根关节轴线平行,共用一个电机驱动实现同步反向偏转;两指的内关节和外关节轴线平行,并与根关节轴线交错垂直,由一个电机经力矩转换器提供驱动,即两指内关节和外关节的动力来自同一个电机驱动,但在运动上存在逻辑关系。手指3有2个轴线平行的转动关节,其驱动同手指1、2的内关节和外关节。

图1 三指灵巧手的结构组成
每个手指中都使用了力矩转换器,其功能是实现单电机驱动下内关节和外关节的逻辑运动,目的是优化抓取效果,图2是力矩转换器的工作原理示意,电机的输出力矩由力矩转换器分配,再经传动实现各手指内、外关节的逻辑转动。

图2 力矩转换器工作原理示意图
当外指节先接触到物体时,根据外关节处传感器的反馈,内、外关节均被锁定,实现单指节抓握,这一过程中转换器持续对内、外关节输出力矩,即C处一直接通;当内指节先接触到物体时,力矩转换器切断内关节的驱动力矩,即C处断开,内关节被锁定,内指节保持与物体接触,此时电机的力矩全部传递给外关节,驱使外指节转动直至其与物体相接触,由此形成双指节接触的封闭抓握[4]。
灵巧手的结构参数如图1所示,3个手指的根部处于同一平面,H是此平面到手掌的距离;手指3的根部位于中间位置,手指1和手指2分布在其两侧,距离为R;A1、A2、A3是单个手指的指节长度尺寸,φ2、φ3是内指节和外指节在起始位置时的初始角度。
2 三指灵巧手运动学分析
2.1 坐标系的建立
为描述三指灵巧手各刚体间的相对位姿,在每个刚体上固定一个坐标系[6],如图3所示,包括手掌固定坐标系{ p alm},指根固定坐标系 { k 0},根指节坐标系,内指节坐标系{ k 2},外指节坐标系 { k 3},指尖坐标系 { k t},k=1,2,3 为手指编号。
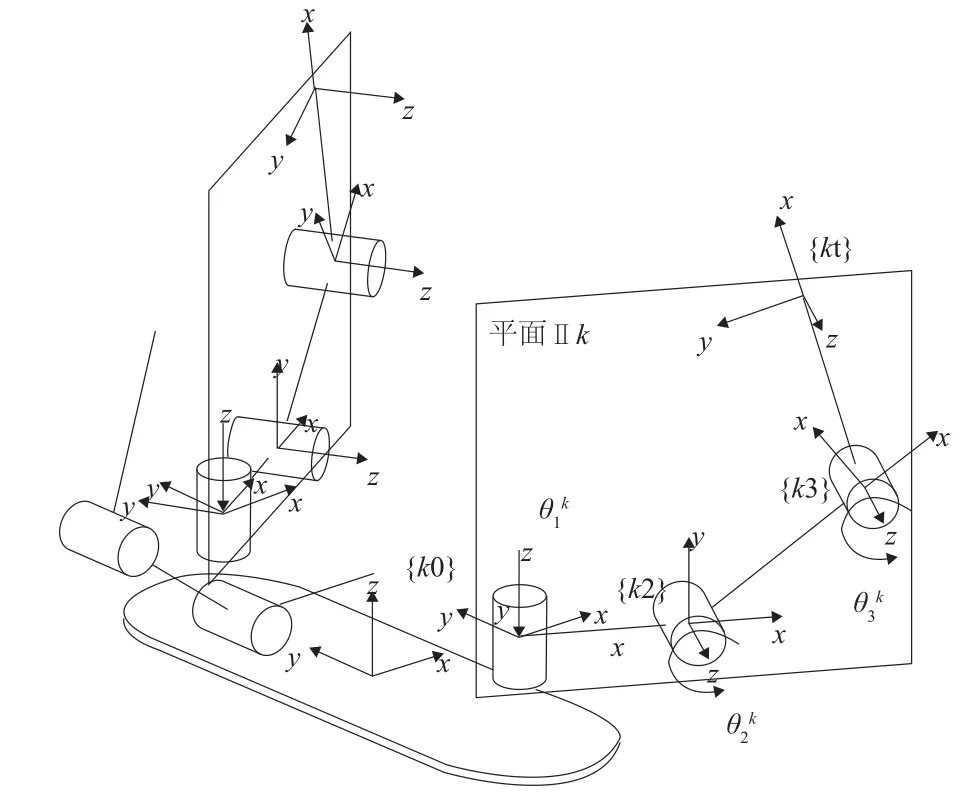
图3 三指灵巧手的坐标系设置
2.2 正运动学分析
从手掌坐标系 { p alm}到三个手指的指根坐标系的坐标变换矩阵为:
根据所建立的灵巧手坐标系,可确定相邻坐标系间的变换矩阵。

其中,对应 k= 1,2,3[ ],有 m= 1,1,0[ ]。
每一手指各关节的D-H参数见表1。鉴于此三指灵巧手在机械结构上的独特性,有为确定的常数(由机械结构确定)。但为了使下面的分析更具普遍性,暂时不考虑各关节转角的属性,仍认为各关节转角是独立的变量。

表1 单指D-H参数
相邻坐标系间的变换矩阵i-1为:

从各手指外关节坐标系 k3{ }到手指末端坐标系的坐标变换矩阵为:
有了数据作基础,技术作支撑,图书馆就可以关联一切可以关联的资源,把一个个信息孤岛整合成数据中心,从而激活资源,实现共享。

于是,从手掌坐标系 { p alm}到手指末端坐标系{kt}的变换矩阵即为各手指5个变换矩阵的乘积:

式(5)和式(6)描述了各手指指尖坐标系相对于手掌的姿态和位置,是灵巧手运动控制和抓取规划等研究的基础和依据。
2.3 逆运动学分析
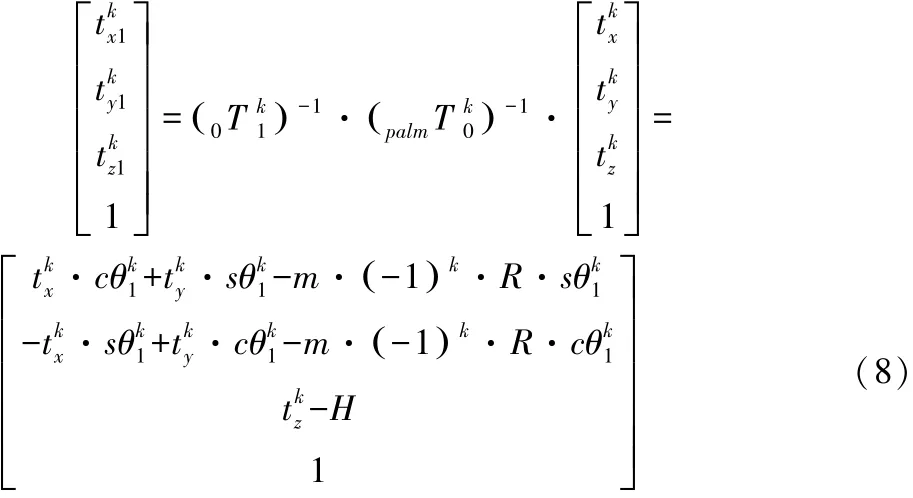
为了使灵巧手各指尖到达期望的位姿,需要进行逆运动学分析,来确定灵巧手各个关节的运动转角。若手指k的指尖位置在手掌坐标系中的表示为,对可以由综合分析方法求得其解析解[2]。
由式(6)的第一行和第二行,容易求得:

对于手指3,其根部与手掌固定,故=180°,求解出后,分析灵巧手几何关系求解和。
在手指k的根关节运动后,其内、外关节和内、外指节均在同一平面Πk内,如图3所示,坐标系 k1{ }的x-z平面与此平面重合,指尖位置在坐标系 k1{ }内的坐标为:
于是在平面Πk内存在如图4所示的几何关系。根据图4,可以利用几何关系求解出于是有:

至此,式(7)-式(10)给出了三指灵巧手的逆运动学解。

图4 单个手指几何关系简图
3 三指灵巧手运动仿真
为了建立仿真对象的几何模型,先确定灵巧手的结构参数数值。手指根部平面距离手掌表面H=8.1 mm;手指1和手指2的根部距离手指3根部R=50 mm;手指指节长度参数 A1=38.86 mm,A2=66 mm,A3=54.33 mm;内指节和外指节的初始角度 φ2=36.39°,φ3=18.73°。
将简化的三指灵巧手的三维模型导入ADAMS中[7],对各关节进行约束,模拟抓取动作设定各个关节转角随时间的变化函数,如式(11)~式(14)。分别表示手指1和手指2根关节从0 s到1 s以30°/s匀速对称转动;三根手指的内关节从0 s到4 s以15°/s匀速转动;三根手指的外关节从0 s到4 s以20°/s匀速转动,再从4 s到5 s以30 °/s匀速转动。

仿真计算后,可以得到三个手指指尖点的坐标变化曲线。
若将上述设定的灵巧手各关节角代入本文所建立的运动学正解方程,即式(5)-式(6),并用MATLAB进行计算[8],同样可以得到三个手指指尖点的坐标变化曲线。将仿真和计算所得曲线在同一张图中描绘,进行对比分析,如图5-图7所示。
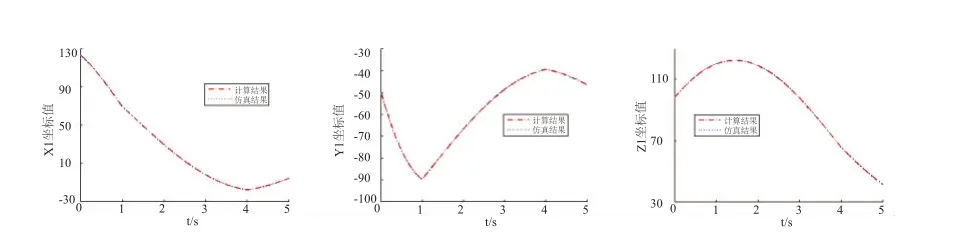
图5 手指1末端坐标变化曲线
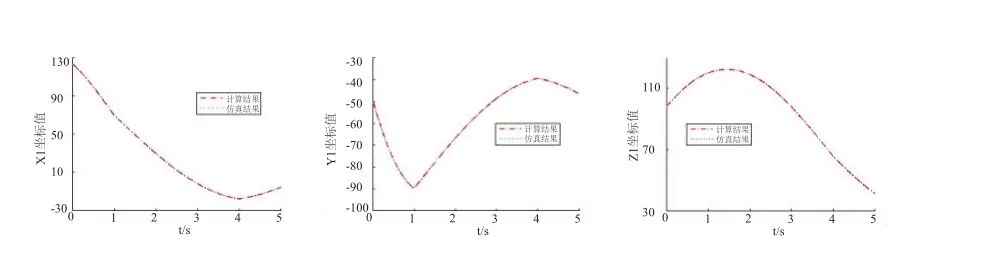
图6 手指2末端坐标变化曲线

图7 手指3末端坐标变化曲线
图中两条曲线完全重合,数学模型的计算结果和仿真结果是一致的,验证了所建正运动学模型的正确性。
对于逆运动学问题,可以取某一时刻的各指尖坐标,代入式(7)-式(10)进行计算,这里取任意的一组各指指尖位置:

用MATALB编程计算,所得结果如表2所示,将各角度代入正解方程,所得指尖位置与给定值一致,从而运动学逆解也得到验证。

表2 逆运动学计算各关节转角
4 结语
提出并设计了一种4自由度、8关节三指灵巧手结构方案,借助力矩转换器对关节运动的逻辑控制作用和对三指相对位置的调整,大大提高了对复杂外形物体抓取的适应性和可靠性。本文将三指灵巧手作为一个系统,建立了整体运动学模型和其正、逆运动学求解算法,并进行了数值计算和仿真验证。本文工作为该三指手的运动控制和抓取规划等进一步研究提供了基础和依据。
[1]张文增,马献德,黄源文,等.末端强力抓取的欠驱动拟人机器人手[J].清华大学学报(自然科学版).2009(02).
[2]李涛.基于欠驱动机构的仿人机器人手爪研究[D].合肥:中国科学技术大学2009.
[3]Maheu V, Frappier J, Archambault P S, et al.Evaluation of the JACO robotic arm: Clinico-economic study for powered wheelchair users with upper-extremity disabilities[C]//Rehabilitation Robotics(ICORR),2011 IEEE International Conference on.IEEE, 2011:1-5.
[4]Townsend W.The BarrettHand grasper–programmably flexible parthandling and assembly[J].IndustrialRobot: An International Journal, 2000:181-188.
[5]Corrales J A,Jara C A,Torres F.Modelling and simulation of a multi-fingered robotic hand for grasping tasks[C]//Control Automation Robotics&Vision(ICARCV),2010 11th International Conference on.IEEE, 2010:1577-1582.
[6]于靖军,刘辛军,等.机器人机构学的数学基础[M].北京:机械工业出版社,2008:278-308.
[7]贾长治,等.MD ADAMS虚拟样机从入门到精通[M].北京:机械工业出版社,2010.
[8]葛哲学.精通MATLAB[M].北京:电子工业出版社,2008.
