光伏供电系统中母线电压控制的仿真研究
2014-09-19,
,
(福州大学 电气工程与自动化学院,福州 350108)
1 引言
当前太阳能供电系统有并网型和独立型,独立型供电系统主要依赖于蓄电池,效率低而且会增加了成本;而网型供电系统成本低,但是在电网检修或者故障的时候,需要避免孤岛效应而与电网切断,这时候就造成了浪费。微网既可与电网并网运行又可离网运行,相对于外部电网为单一的受控单元。它能够满足人们对供电质量,安全性及稳定性的要求[1]。光伏等分布式微电源多为直流电源,直流微网更适应于光伏等新能源供电。蓄电池作为光伏微网系统中不可缺少的储能设备,在离网情况下,蓄电池要通过充放电来跟踪微网中电源的功率和负荷的波动[2]。当直流型微电网工作在离网模式时,由于直流型微电网同公共电网失去联系,直流型微电网只能靠储能装置通过双向DC/DC电路与直流母线进行电能交换来稳定直流母线电压,并以直流母线为基础调节系统内电能供求平衡[3]。总之,直流母线电压稳定才能保证微电网离网情况下系统的正常供电运行,而且这也是并网前的基本要求。
2 供电系统的结构
供电系统的结构如图1所示,太阳能作为电源供电,蓄电池作为储能装置,又是电源又是负载,起到缓冲平衡功率的作用,当太阳能电源提供能量小于负载需求的时候,蓄电池作为电源跟光伏电池一起供电,同样当太阳能提供能量大于负载所需时,蓄电池吸收掉多余的电能。系统输出则是经过逆变器输送交流电供负载。太阳能光伏电池经过最大功率追踪后连接到直流母线;蓄电池通过双向DC/DC充放电电路接在母线侧,可以实现能量的双向流动。输出的工频电,既可以直接给重要负载供电,能量充足又可以实现并网。在离网情况下,能量的供需不平衡导致母线电压的波动,影响系统的正常运行和并网。这样系统结构使得多个直流微电源一起供电时能够方便的接入微网,直流母线的电压必须是稳定的。

图1 微电网系统结构
3 控制策略
光伏电池输出的最大功率点随温度和光照强度的变化而改变,呈非线性特点,但是有唯一确定的输出电压使得光伏电池的输出功率达到最大值。最大功率追踪基本原理就是在光伏电池和负载之间引入直流变换开关对阻抗进行变换,负载的等效阻抗跟随太阳能光伏电池的输出阻抗就得到了最大输出功率。对Buck电路和Boost电路在光伏最大功率跟踪中的应用做对比[4],研究发现对于光伏电池的能量转化效率Boost电路比 Buck电路的要高,因此选择Boost电路作为最大功率追踪的变流器比较合适。
最大功率追踪的控制策略比较多,但是在外界环境参数变化较缓慢的场合,并且需要光伏系统稳定长时间运行时,适合选用扰动观测法或者定步长导纳增量法控制[5],由于导纳法对传感器精度要求较高,所以采用扰动观察法比较合适。扰动和观察是一个迭代过程,不需知道太阳能光伏阵列的特性,所以是普遍使用的一种方法。但是普通的扰动法具有很好的动态跟踪性能,但是稳定时会在最大功率点附近震荡,造成功率损失。步长减小会减小震荡损失但会影响追踪速度,根据蓄电池P-U特性提出一中可以根据斜率改变步长的的方法,工作原理如图2所示,测量得到当前光伏电池的电压值Uk电流Ik,计算得ΔP、ΔU,如果ΔP变化很小,说明已经在最大功率点,不用再追踪了,否则继续追踪,通过ΔPΔU大于小于零情况判断工作点在左坡还是右坡,从而确定扰动的方向,是该加大电压还是减小电压。如果|ΔP/ΔU|>M,这时候距离坡顶比较远,用大步长追踪比较快,并且步长随着比值大小而改变,可以防止错过峰值;当离坡顶比较近的时候使用小步长,左右两侧陡峭程度不同,采用左右不同的步长追踪。

图2 最大功率追踪流程图


图3 平衡功率控制策略
4 实验结果分析
利用 Matlab/Simulink对离网情况系统运行进行仿真,光伏电池板采用CN-200S,其参数为:Pm =200 W、Isc =7.44 A、Im = 6.94A、Voc =35.4V、Vm =28.8V。仿真条件如下,采用3并13串的方法得到光伏阵列的短路电流为 22.32A,开路电压为424.8V,最大功率点电压345.6V,最大输出功率为9482W;直流母线参考电压为600V,储能蓄电池是额定电压 150V,额定容量 200Ah的铅酸蓄电池;逆变器额定输出功率8kW。仿真结果如以下各图所示。
图4(a)为普通扰动法最大功率追踪的曲线,(b)为改进后最大的功率追踪曲线,通过对比可以明显的看出新的控制策略不仅可以快速追踪最大功率,而且在稳定状态大大的减少了功率扰动损失,提高了对光伏电池的利用率。
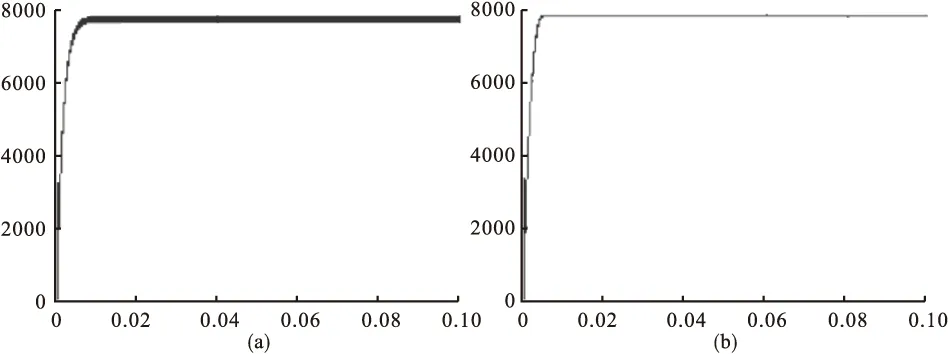
图4 改进前后的最大功率追踪
从图5中可以看出扰动法可以较快实现最大功率的追踪,并且在0.03s的时候光照强度增强,光伏系统能迅速追踪到最大功率,这时候光伏电池产生的能量大于逆变器所需的能量,这部分能量累计会使得直流母线电压升高;在0.07s时光照强度减弱,这时候光伏电池输出能量不足以支持逆变器消耗,系统的输出大于输入必然会导致母线电压下降。这都需要蓄电池来平衡功率,蓄电池的工作功率如图6所示,从中可以看出,在0.03s和0.07s的时候蓄电池进行了充电、放电来维持系统的功率平衡。直流母线电压的波形如图7所示,可以看出在任何情况下都可以维持稳定并且控制在600V左右。

图5 光伏电池最大功率追踪下的电压、电流、功率波形

图6 蓄电池工作的功率波形
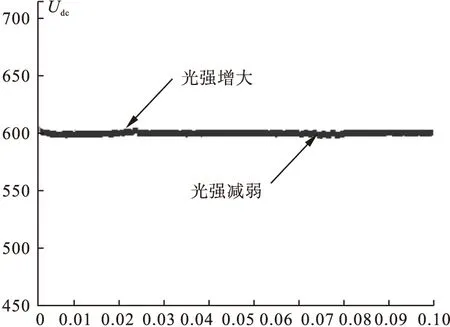
图7 直流母线电压波形
5 结论
本文通过分析接受光伏直流微电网结构模型,改进扰动观察法对光伏阵列进行最大功率点的追踪,通过双环控制由双向的DC/DC变换器对蓄电池充放电,从而实现对功率的平衡功能,光伏电源与蓄电池共同作用实现母线电压的稳定。通过控制策略理论分析和仿真实验,结果显示控制方法切实有效,为进一步研究分布式电源供电应用提供了依据。
[1]王成山,王守相.分布式发电功能系统若干问题研究[J].电力系统自动化,2008,32(20):1-4.
[2]郭天勇,赵庚申,赵耀,等.基于风光互补的微网系统建模与仿真,电力系统保护与控制,2010,11(21).
[3]袁建华.分布式光伏发电微电网供能系统研究[D].山东大学,2011.
[4]I.Glasne.Advantage of Boost Vs Buck Topology for Maximum Power Point Tracker inPhotovoltaic Systems[C].Nineteenth Convention of Electrical and Electronics Engineer,1996:335-358.
[5]徐鹏威,段善旭,刘飞,等.几种光伏系统MPPT方法的分析与比较[D].华中科技大学.
