基于信标和DVB信号的对星伺服控制系统
2014-09-18刘光伦陈玲玲
刘光伦,陈 志,陈玲玲
(四川九洲电器集团有限责任公司第四研究所,四川 绵阳 621000)
卫星通信系统是集天线与微波技术、微电子技术、自动控制技术、数据采集及信号处理技术、计算机仿真技术、精密机械设计技术、卫星通信技术和机电一体化技术等多学科和多项技术有机结合的产物[1]。高精度天线跟踪控制技术是实现高质量卫星通信的前提。最初的对星方式均是由人手动对星,后来随着技术的发展,出现了依靠自动控制技术进行自动对星。目前无论是便携站还是固定站的卫星对星技术均基于卫星信标信号的方式,手段比较单一,在遇到卫星上信标信号比较弱或是没有信标信号时,基于信标的跟踪方式就无能为力了。本文讨论的系统不仅可以用卫星信标信号来进行自动对星,也能用卫星上DVB电视信号来进行自动对星,这样控制系统就能应用在没有信标信号或是卫星信标信号比较差(受干扰)的卫星上。这种采用双信号跟踪的方式,解决了目前单一依靠信标信号来进行自动对星的问题,使对星方式更加灵活,不仅系统的可靠性更高,而且应用的范围也更广。
1 控制部分原理设计
在整个系统中,伺服控制部分有着至关重要的作用,天线控制系统必须保证天线波束主轴准确指向卫星而且对准卫星的下行发射波束,通信系统才能够正常工作。为达到这一目标,在进行系统设计时除了在机械结构、传感器选择、硬件设计方面应充分考虑可能带来的影响和精度误差外,还必须设计合适的信号跟踪方式以提高系统的指向精度[2]。
本系统通过将GPS、数字罗盘、天线控制器、执行电机,结合信标信号和DVB信号电平反馈形成系统大闭环控制,完成抛物面天线准确对准指定卫星的发射波束。如图1为整个伺服控制系统的硬件原理框图。
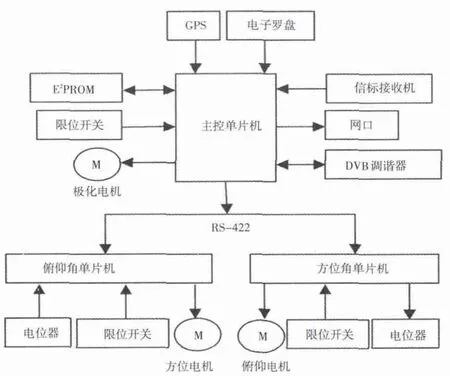
图1 伺服控制系统硬件原理框图
对星控制装置的工作原理为:在系统上电后首先通过电子罗盘获取抛物面天线本身的姿态信息,然后通过GPS接收机获取接收天线所在地的高度、经度和纬度,再读取E2PROM配置芯片里面的对星参数,E2PROM里的对星参数是通过手持端机把对星参数发送给主控单片机,由主控单片机把对星参数写入E2PROM。单片机程序再根据这些数据信息计算出天线对准该卫星所需要的理论方位角、俯仰角和极化角。主控单片机先控制极化电机转动相应的极化角,然后通过RS-422发送指令给方位角控制单片机和俯仰角控制单片机转动俯仰角和方位角到指定位置完成天线初始对准。初始对准完成后,主控单片机程序控制方位角和俯仰角电机在一个20°范围内进行梯形扫描并开始搜索卫星信号,此时信标接收机和调谐器不断输出信号电平值到主控单片机进行信号强度判断。如果采用卫星信标信号对星则信标接收机输出对应卫星的信标信号电平到主控单片机,如果采用DVB信号对星,则主控单片机读取调谐器的信号电平值,一旦主控单片机接收到的电平值达到一个设定的阈值时,说明天线已进入了卫星的波束范围。此时主控单片机程序进入卫星极大值定位程序,再分别控制方位角电机和俯仰角电机转动使其达到信号最强的位置,即实现了天线对卫星的精确对准。在整个对星的过程中,手持终端实时地接收和显示天线转台的当前方位角、俯仰角以及信号强度值。
2 天线指向角计算
天线指向角就是根据卫星位置信息、接收天线位置信息以及接收天线的姿态信息计算出极化角、俯仰角和方位角。主控单片机根据计算出的极化角、俯仰角和方位角来控制电机转动天线到相应位置,完成天线的粗对准[3]。
考虑接收天线的方位角、俯仰角、倾斜角,所以地理坐标系和载体坐标系重合,接收天线指向卫星的角度计算涉及到三个坐标系的转换,如图2所示。

图2 坐标系转换
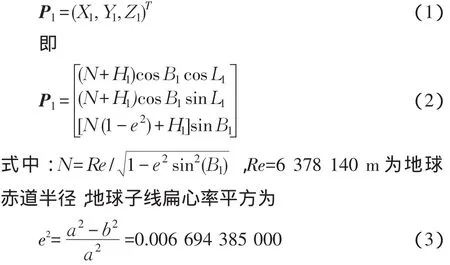
假设地面接收天线的大地坐标系即经度、纬度、高度,表示为(L1,B1,H1),飞机的大地坐标系即经度、纬度、高度,表示为(L2,B2,H2)。由接收天线的大地坐标系计算接收天线在地心直角坐标系中的坐标为
由卫星的大地坐标系,计算卫星在地心直角坐标系中的坐标为

计算卫星在接收天线的地理坐标系中的坐标为

式中:T1是从地心直角坐标系到地理坐标系的转换矩阵。即


通过方位角和俯仰角的计算公式,得到接收天线的指向角。方位角公式为
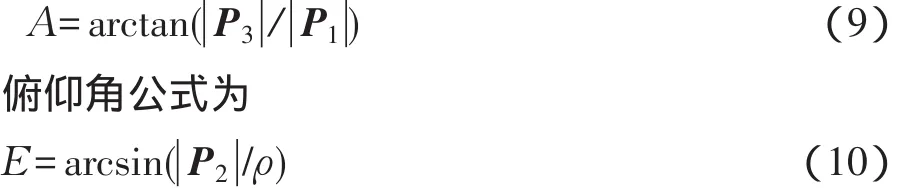
接收天线指向飞机的向量为

由于俯仰角定义在[0°,90°],和反正弦的主值区间相同,所以实际俯仰角就等于E,方位角定义在[0°,360°],和反正切函数的主值区间不一致,故应判断实际方位角所在的象限(以逆时针为正)。
X1>0,Z3>0时,方位角 A=2π-A ;X1>0,Z3<0时,方位角A=-A;
X1<0,Z3>0时,方位角 A=π-A;X1<0,Z3<0时,方位角A=π-A。
为了达到好的接收效果,除调整天线的方位角和俯仰角外,还应根据极化角的数值来调整馈源矩形波导口的方向,使得极化振子调整到与电磁波一致的方向,此时极化完全匹配与卫星传送来的极化,振子感应的信号强度最大,接收效果最佳[4-5]。不同地理位置的接收天线其极化角也不同,令ϕ1,θ1,ϕ2分别表示接收天线的经度、纬度和静止卫星的在轨经度,则接收天线对准目标卫星所需的理论极化角θ为

ρ为接收天线到卫星的距离公式为
3 最大值定位算法设计
采用粗对准算法能够大致对准卫星所在的方向,但是还不能对准卫星发射信号波束,此时无论是卫星信标接收机的信标电平值还是DVB调谐器输出的信号电平值都是一个很低的值。此时在转台走到初始对准位置后,以初始对准位置为圆心,在一个很小的范围内进行梯形扫描或十字扫描。在扫描的过程中,实时监测DVB调谐器或信标机输出的信号电平值,如果输出的信号电平值达了设定的阈值,则说明接收天线进入了卫星的发射波束,但此时,接收天线还没有准确对准,信号电平值还不是最大值,最后再用最大值定位算法来找准信标电平的最大值或DVB调谐器输出的信号最大值。最大值定位算法程序先进行水平方向的最大值定位,再进行俯仰方向最大值定位。图3为最大值定位算法的基本原理。
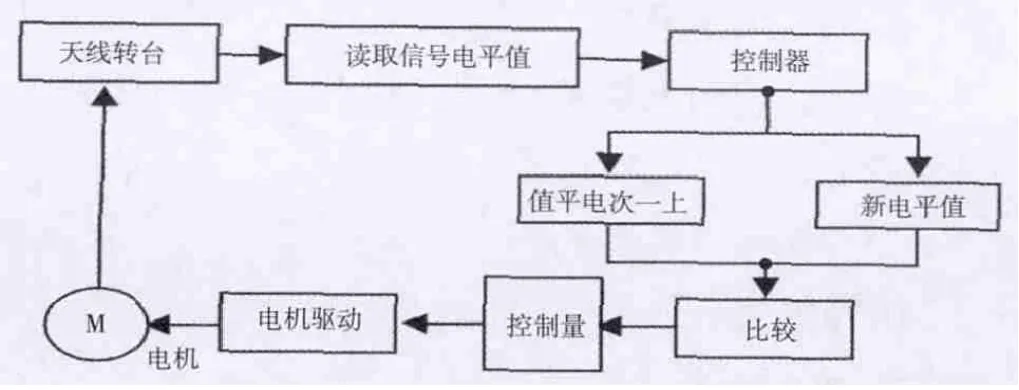
图3 最大值定位算法原理图
最大值定位算法,主要思想是用前后两次读取到的信号电平值来决定转台走的方向和步进电机走的步数。如果当前读出的电平值比前一次读出的电平值高,说明还要继续往前走才是信号最大值的位置,此时转台继续往本次前进的方向上走N步,走完后,读取当前的信号电平值,该电平值又与前一次的电平值进行比较,如果此次的电平值还大于前一次的电平值则继续往前走N步,否则,转台往回走K(K=N/2)步,以此类推,只要是往回走,走的步数都是上次所走步数的1/2,直到走的步数为0。此时,接收天线转台就停在信号电平最大值的位置。俯仰方向的最大值定位,再重复以上的步骤。经过水平方向的最大值定位和俯仰方向的最大值定位后,接收天线就准确对准卫星的发射波束。
4 实验验证
整个伺服系统在1.2 m的便携式卫星地面站上进行了户外的对星测试,图4为对星测试的天线转台和对星测试控制软件的主界面。
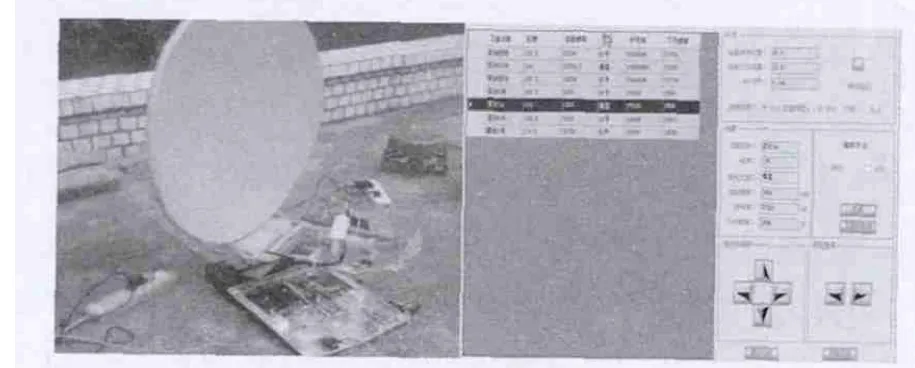
图4 对星测试平台和测试软件界面(截图)
伺服控制系统在不同地点、不同时间进行了多次多颗卫星的对星测试。每次进行测试时,首先对每颗卫星先进行10次以上垂直极化的卫星信标信号对星,再进行10次以上的水平极化的信标信号对星,然后再进行10次以上不同节目的DVB信号对星。判断是否对准卫星发射波束的标准,一是通过便携式频谱仪进行信标信号的强度测量,二是通过卫星上的电视节目清晰度和流畅性来直观判断。测试分别对亚洲3号、亚太5号、中星6A、亚太2R、亚太6号共5颗卫星上的信标信号和DVB信号进行了对星测试,对星准确率都达到了100%,实验也充分证明在卫星上没有信标信号的情况下或信标信号被干扰的情况下,用卫星上的DVB信号也能准确对星[6]。
5 结论
本文提出的一种基于卫星信标信号和卫星DVB信号的对星伺服控制系统,采用了信标和DVB两种对星方式,与传统单一的对星方式不同,两种对星方式互为补充,进一步提高系统的可靠性,同时也拓宽了适用卫星的范围,既适用于有信标信号的卫星,也适用于没有信标信号的卫星或是信标信号被干扰的卫星。系统经过室外反复的对星测试,无论是采用信标对星方式还是采用DVB对星方式,都能准确地对准卫星波束而且找到信号电平最大值,达到了设计目标。
:
[1]曹志刚.移动卫星通信天线自动跟踪方法[D].重庆:重庆大学,2005.
[2]魏海涛.一种新型的便携式卫星通信地球站[D].南京:南京邮电大学,2006.
[3]孙兴邦.卫星天线自动跟踪算法的研究[D].大连:大连海事大学,2008.
[4]康春锁,何彪.卫星地球站天线极化的调整[J].广播与电视技术,2000(1):104-106.
[5]叶修怡.卫星电视的极化及其调整与测量[J].广播与电视技术,2001(2):96-100.
[6]申宇.移动卫星电视接收伺服系统的研究与实现[D].西安:西安电子科技大学,2006.
