一种人力式垃圾清扫车的结构设计与分析
2014-09-14汤学华夏晨晨
汤学华, 夏晨晨, 蒋 政
(上海电机学院 机械学院, 上海 200240)
一种人力式垃圾清扫车的结构设计与分析
汤学华, 夏晨晨, 蒋 政
(上海电机学院 机械学院, 上海 200240)
介绍了一种针对小区等较窄路面的人力式垃圾清扫车的整体结构设计,该机具有结构简单、加工成本低、工作效率高等特点。对垃圾清扫车的滚刷轴辊进行了静力学分析,结果表明滚刷轴辊在清扫车工作过程中能够满足其设计刚度的要求。
垃圾清扫车; 结构设计; 轴辊分析
随着社会经济和城市化建设的发展,城市的保洁工作变得越来越重要。由于每个地区的城市化水平并不相同,故其所使用的保洁方式也不同。一线城市多使用较为先进的自动化清扫车完成了大部分城市公路的清扫工作。而对于经济较为落后的地区,则多使用人力的方式传统的扫帚进行清扫[1-2]。根据这一城市道路清扫的情况,笔者设计了一种适用于城市街区、公园、小区、学校等道路的人力式小型垃圾清扫车,减轻环卫工人的劳动强度,提高清扫效率。
1 工作原理
本文设计的垃圾清扫车采用人力推动的方式使垃圾车运动,配置48V蓄电池,对提供清扫装置的运转提供动力。在清扫时,使用者将手控杆向下按到指定位置并扣住,由于机构的联动作用,此时盘刷向前倾斜一定角度[3],滚刷向下移动一定距离,使得此时盘刷、滚刷都与地面有一定接触。当启动清扫装置电源时,左右盘刷均由外侧向内侧旋转,将垃圾逐渐向垃圾清扫车中部收集,此时滚刷由地面向上旋转。左右盘刷收集在内侧的垃圾在滚刷旋转的作用下,垃圾沿滚刷切线方向产生一定的初速度,部分垃圾能够沿一定角度飞溅[4]。由于盘刷倾斜一定角度,腾空的垃圾碰撞到盘刷后,在盘刷旋转作用下,沿着不确定的角度“跃入”垃圾仓内。而部分没有“跃入”垃圾仓内的垃圾便掉到地面上,继续在盘刷与滚刷的作用下进行往复运动。在倾倒垃圾时,操作人员将垃圾仓抽出进行倾倒垃圾。利用防扬尘装置防止垃圾车在工作时所引起的尘土飞扬,优化环卫工人的工作环境。垃圾清扫车如图1所示。

图1 垃圾清扫车Fig.1 Road sweeper
2 结构设计
该垃圾清扫车主要由扶手、蓄电池、车体、车轮、滚刷组合、盘刷组合、万向轮、空气过滤装置、手控杆等组成,其结构如图2所示。
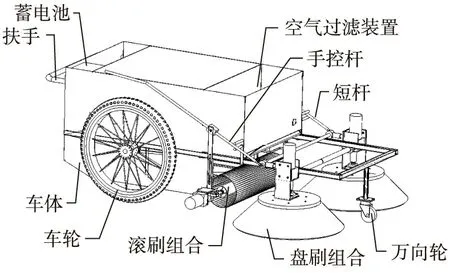
图2 垃圾清扫车结构示意图Fig.2 Structure of the road sweeper
部分技术参数如下:
(1) 盘刷电动机48V,额定功率110W,转速60r/min;
(2) 滚刷电动机48V,额定功率40W,转速30r/min;
(3) 鼓风机 48V,额定功率 30W,风速 0.92m3/min,风压150Pa,回转式风机;
(4) 工作速度vmax=5km/h;
(5) 清洁宽度(主刷+边刷)1.569m。
清扫装置是由盘刷和滚刷两部分组合,盘刷的底圆直径约为713mm,盘刷组合的最大宽度约为1.569m,大于车体的最大宽度,便于清扫台阶角落处的清扫盲区。滚刷的刷辊直径为 70mm,苗高70mm,最大外圆直径为210mm。在清扫时,使用者将手控杆向下按到指定位置并扣住,在连杆机构的作用下,使盘刷向前倾斜约15°,与地面接触的刷毛长度约45mm;滚刷向下移动约 40mm 的距离,与地面形成宽度约为 30mm 的接触面积[5]。而在不清扫时可将手控杆抬起到原来位置并扣住,此时盘刷与滚刷都处于悬空状态,减少非工作状态时垃圾车与地面的摩擦力,增加垃圾车运动的灵活性[6-10]。
运动装置由2个大轮和1个万向轮组成,这3个轮子同时承担整个车体的质量,由于万向轮的灵活性,适合清扫较为不平的路面。
防扬尘装置是由喷水装置和空气净化装置组成。喷水装置由水箱、水泵、水管、喷头组成。水泵将水箱中的水抽出并在喷头处喷出,因为喷头的孔较小,所以形成雾化环境;喷头安装位置在滚刷的上方,由于雾化作用,粉尘被吸附到小水珠的表面,防止扬尘。空气净化装置由过滤器、鼓风机和管道组成,位于车体的前方,由于鼓风机的吸力,车体内部的空气经过过滤器被排到外部,形成车体内部、外部的空气循环与净化的过程(见图3,图中箭头表示空气循环方向)。

图3 垃圾箱内除尘气体循环Fig.3 Air circulation inside the bin
收集垃圾的装置是可抽拉式垃圾仓,在垃圾仓底部有一定数量的小孔,方便垃圾中的泔水流出,在垃圾仓的前部有一块固定的倾斜板,用于引导垃圾向垃圾仓的深处移动,避免垃圾堆积在垃圾仓的前部,垃圾仓底部有4个滑轮,便于操作人员将垃圾仓抽出进行倾倒垃圾[11-15]。
3 有限元分析
通过上文的工作原理及结构设计分析可知,垃圾清扫车的主要功能部件为清扫装置。其中滚刷主要功能是将垃圾卷入垃圾箱内,由于其跨度较大,主要承受来自于电动机的转矩,为易变形件。其可靠性是否满足要求直接影响垃圾清扫车完成工作的质量。故对其进行静力学分析。
垃圾清扫车滚刷轴辊的设计长度为1.350m。对其受力分析,将工作时状态的轴辊简化为简支梁,简化力学模型约束点间距离为1.050m且两约束点轴对称分布[16]。轴辊主要负载是滚刷自身重力、滚刷工作时毛刷与地面的摩擦力。作用在两支点上的力均为29.6N,其极限摩擦力是105N。查阅《机械设计手册》,根据轴的刚度校核中弯曲变形许用值(见表1),计算轴辊允许最大弯曲变形值为0.165mm。

表1 轴的变形许用值Tab.1 Allowable axial deformation values
轴辊材料为45钢,具有较高的强度和韧性(见表2)。对于其强度和刚度是否满足设计要求,使用NX软件建立了滚刷轴辊的三维模型并导入ANSYS WORKBENCH软件中进行有限元分析。

表2 45钢材料属性Tab.2 Material properties of #45 steel
在NX软件中对滚刷轴辊模型进行理想化模型处理,将轴辊上的螺纹以及退刀槽忽略。再导入ANSYS WORKBENCH软件中进行网格划分,由于轴辊的横截面为圆形,其直径为28mm,故选择单元类型为Solid186(三维6面体20节点的结构单元),划分网格大小为10mm,节点数为 8718 个,网格数4433个[17]。
滚刷轴辊主要的载荷为其自身的质量、刷毛与地面之间的摩擦力,摩擦力的方向为轴辊的切线方向。由于轴辊安装在支撑架轴承上,通过对其工作时的状态进行受力分析。由于滚刷在工作时轴向游动较小,可近似忽略,故轴辊两端可简化为固定端约束,然后在ANSYS WORKBENCH环境下对其施加重力与摩擦力载荷,得到应力云图(见图4)与位移云图(见图5)。
从轴辊有限元分析云图可以看出,轴辊应变最大值位于轴辊中部,最大形变位移为0.01mm,远小于轴辊允许最大弯曲变形值0.165mm。且形变关于轴辊中心对称,符合简支梁在本文简化模型中受力形变的效果,符合设计要求。
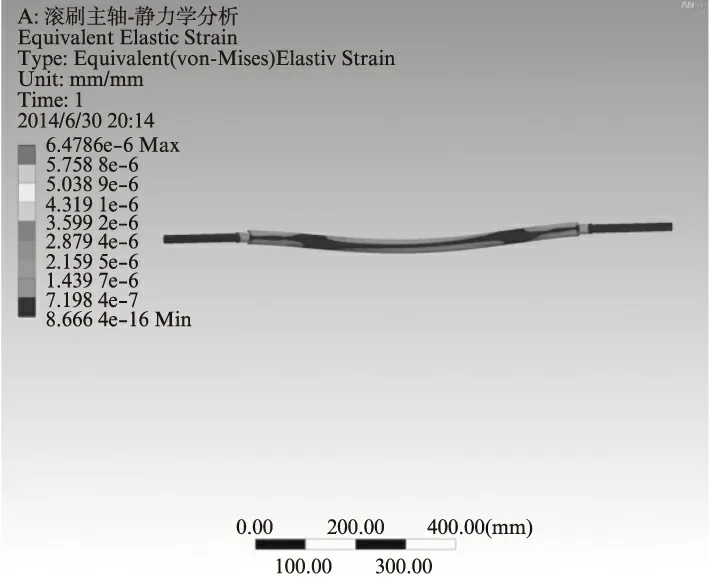
图4 应力云图Fig.4 Equivalent elastic strain

图5 位移云图Fig.5 Total deformation
4 结 语
使用NX软件垃圾清扫车建立了三维模型,并使用ANSYS WORKBENCH软件对垃圾车清扫装置的主要工作部件滚刷轴锟进行了静力学分析。通过以上分析,垃圾清扫车满足其功能要求,结构简单。并以此制作了工作样机,进行了垃圾清扫测试。在人力推动的情况下,垃圾车清扫装置工作正常,能够达到对地面清扫的标准。
[1] 杜木伟,韩屹丽,刘晨敏.我国路面清扫车技术现状与发展趋势[J].工程机械文摘,2013(2): 65-67.
[2] 罗立炎,于今,李源.我国道路清扫车的发展趋势[C]∥易树平.2010年机械工程学会年会论文集.北京: 机械工业出版社,2010: 88-89.
[3] 徐会敢,任国涛,赵金鹏.清扫车盘刷工作参数试验研究[J].建设机械技术与管理,2013(4): 107-111.
[4] 徐会敢,任国涛,赵金鹏.清扫车盘刷清扫效率试验研究[J].工程机械与维修,2013(7): 185-186.
[5] 朱龙英,鲁迎波.基于ANSYS的扫路车盘刷刷丝与垃圾的接触特性研究[J].制造业自动化,2012,34(11): 104-107.
[6] 吴刚,张棉好,杨仲辉,等.小型电动清扫车的研制[J].科技资讯,2011(15): 34-36.
[7] 叶静波.手推式地面清洁机造型设计[D].长春: 吉林大学,2013: 10-18.
[8] 杨启勇.纯扫式街道垃圾清扫小车的设计[J].机械与电子,2010(10): 71-73.
[9] 徐小六,白甫停,余雨.小型手推式落叶清扫车的研制[J].科技资讯,2013(33): 50-51.
[10] 薛艳敏,胡静,张纪军.基于人机工程学的小型道路清扫车造型设计[J].包装工程,2008,29(5): 109-112.
[11] 王琳.一种多功能清扫装置机械结构设计与研究[J].机械工程师,2013(8): 54-56.
[12] 简洁.电动清扫车清扫作业装置的设计与研究[D].南京: 南京理工大学,2012: 34-38.
[13] 魏崇斌,王文静,王海红.新型清扫车的设计[J].机械工程师,2006(4): 135.
[14] 张争艳,胡吉全,陈定方,等.一种集洗扫拖于一体的新型轻便垃圾清扫车[J].武汉理工大学学报,2012,36(4): 787-790.
[15] 杨启勇,郭维春,张业民.纯扫式街道垃圾清扫小车的设计[J].建设机械技术与管理,2010(9): 96-97.
[16] 薛继明,吴晓庆,王焕功,等.有限元分析中轴对称问题研究与应用[J].机械工程师,2014(4): 126-128.
[17] 唐良兵,王伟.基于ANSYS的汽车传动轴的有限元分析[J].计算机应用技术,2013,40(1): 45-51.
Construction Design and Analysis of Human-Powered Road Sweeper
TANGXuehua,XIAChenchen,JIANGZheng
(School of Mechanical Engineering, Shanghai Dianji University, Shanghai 200240, China)
This paper describes the design of a human-powered road sweeper to be used for narrow roads in residential areas. It has a simple structure, low processing cost, and high efficiency. Statics analysis of the roller of a rolling brush is carried out, showing that the roller can meet the stiffness requirement.
road sweeper; structure design; shaft roller analysis
2014 - 08 - 20
汤学华(1963-),男,教授,博士,主要研究方向为机电一体化技术,E-mail: tangxh@sdju.edu.cn
2095 - 0020(2014)05 -0259 - 04
U 418.324
A
