液压支架多机控制系统通信结构分析探讨
2014-09-13夏润生吴德生潘六寿
夏润生,吴德生,潘六寿
(1.中国矿业大学(北京)机电与信息工程学院,北京 100083;2.淮南矿业集团顾桥煤矿 机电安装队,安徽 淮南 232100)
0 引言
综采面液压支架计算机控制系统(简称:支架控制系统)是一种多计算机控制系统,每台液压支架均由一台计算机支架控制器,通过串口将工作面所有支架的控制器连接起来,形成局域通信网。控制器除了对本支架控制和监测,还可接收其它控制器的控制命令,或向其它控制器发送控制命令,实现本架控制、邻架控制、隔架控制、成组控制、采煤机位置自动控制等功能。目前,煤矿现场应用的支架控制系统主要有德国DBT,美国JOY 等公司的产品,不同公司产品的通信结构或协议是不同的。本文通过对常见几种多机通信结构进行分析,探讨适用于支架控制系统的通讯结构。
1 多机通信网络结构的特点
常见的多机通信网络结构如图1所示,有星型结构图 1(a)、 环形结构图 1(b)、 主从总线结构图 1(c)、 多主总线结构图 1(d)。
星形结构图1(a)采用集中式控制,所有的下位机均通过独立的通信线路连接到中心计算机(或集线器),彼此之间没有直接的通信线路,一旦集线器出现故障,则导致全网瘫痪,失去控制功能。因此,星型结构在高可靠性的应用领域受到限制,不适于支架控制系统。
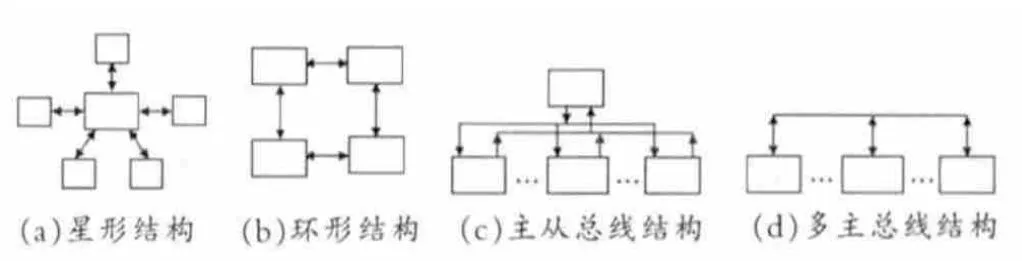
图1 多机通信网络结构
环行结构图1(b)实现非常简单,传输速度较快,但是每个下位机只能与相邻的下位机相连,不相邻下位机的信息传递必须通过中间下位机的传递才能实现,任何一个下位机出故障势必造成整个网络的中断,另外,环形结构节点的扩展和移动都不太方便。
主从总线结构图1(c)只有一个上位机,其余均为下位机。上位机发送的信号可被所有下位机接收,下位机发送的信号只能由上位机接收。任何一台从机发生故障不影响整个系统的正常工作。一旦上位机发生故障,将导致整个系统瘫痪,通常系统有两台上位机,一台工作一台备有,以增加系统的可靠性。但从机与从机之间只能通过上位机来实现间接的信息传递和控制,必然影响到系统的响应速度。美国JOY 公司的支架控制系统采用这种结构。
多主通信总线结构图1(d),就是在一根通讯总线上分布着多个节点,每个节点就是一个下位机。系统中的任何节点可作为主控节点控制其他节点,也可以作为被控节点被其他节点控制,节点是主控还是被控是随机的,比较灵活。节点之间直接传递信息,响应速度快。系统中任何节点发生故障时,不会影响整个系统的正常工作,可靠性高。强大的总线仲裁功能,可顺利解决信号冲突的问题。总线的电缆数量少,结构简单,易于扩充。
因此,对于节点之间要求互控性的支架控制系统而言,多主总线结构是最理想的选择。其中,CAN现场总线使用较为普遍。
2 多主通信总线在支架控制系统中的应用
液压支架在工作面中要求完成采煤过程中的支护顶板、收护帮板、降移升、推进机采设备等一系列动作,并要求液压支架、采煤机和刮板输送机三机动作相互协调。液压支架与这些机采设备的协调关系要求有一个通信结构可靠、合理的计算机控制系统。
根据采煤工作面运行工况以及满足液压支架与采煤机、刮板输送机的相互约束关系,由CAN总线的响应速度快、可靠性高、通信实时性好、纠错能力强等优点,本文就CAN总线结构的液压支架计算机控制系统进行重点分析。
3 系统原理结构与功能
3.1 系统原理结构
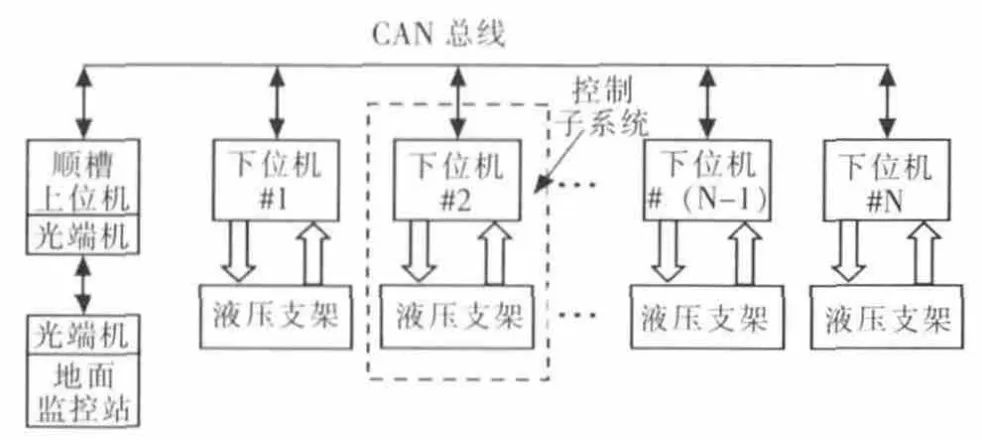
图2 多主总线通信结构原理
根据综采面支架之间互控的要求,认为支架控制系统采用多主总线通信结构最合理可靠。本文即采用CAN(Controller Area Network,控制器局域网络)总线结构,原理结构如图2所示。顺槽上位机和所有下位机的串行接口均挂接在CAN总线上,地面监控站与顺槽上位机通过光缆和光端机进行通信,每架液压支架均由对应的下位机进行检测和控制,构成控制子系统(如图2 虚线框所示)。顺槽上位机及各下位机主要完成对来自CAN总线数据信息的存储、信号的检测反馈、数据的历史查询,地面监控站主要完成工作面矿压、支架故障信息以及运行状态的实时显示,CAN总线是各控制机互相传递信息的纽带,各控制机均能作为其它控制机的上位机实现本架、邻架、隔架控制以及成组控制,达到互控的要求。
3.2 下位机结构原理
下位机的结构如图3所示,是以ARM 单片机为核心,扩展了控制放大电路,红外接收器,位移、压力、红外传感器,A/D 转换电路,LCD 显示器和键盘,构成了一个计算机闭环控制系统。CAN总线连接上位机与下位机,通过操作下位机键盘实现对本架支架的控制,通过单片机串口向其它下位机发出控制命令,控制相应的下位机完成预定的动作。显示器同步显示工作面状态,并及时报告故障位置,便于操作人员及时做出处理。
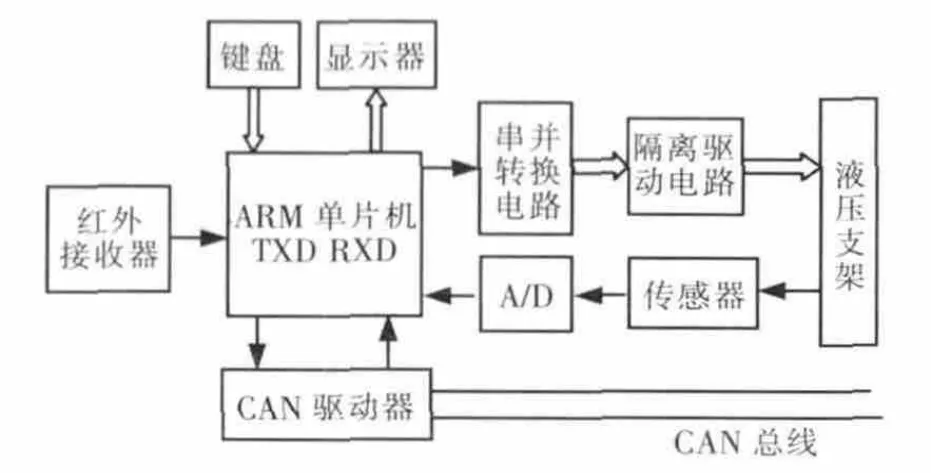
图3 下位机的硬件设计原理图
3.3 系统通信控制
CAN总线是一种典型的工业现场通信总线,通信方式灵活。根据CAN总线的通信协议,以及通信所必需的一些数据要求,制定了相应的工程报文格式,见表1,经验证可以完成各控制机之间的信息传递和相互控制。其中,字节4 到字节11位用于存储数据帧的实际传输数据,数据6、7、8为保留位,方便以后添加,用于传输一些检测到的数据。
4 结束语
综上分析可知,四种通信结构均可实现综采面液压支架的多机控制,但多主总线结构最合理、最可靠。本文以综采面液压支架作为研究对象,采用单片机串口通信技术对CAN总线多机控制系统进行了介绍。结果表明,多主机控制系统对控制命令响应迅速、可靠性高、纠错能力强、系统的可维护性好,减少了操作人员的数量,降低了工人的劳动强度,提高了生产效率以及安全保障,适用于综采工作面液压支架的联机控制。本文对研究其它液压支架计算机控制系统具有一定的参考价值。
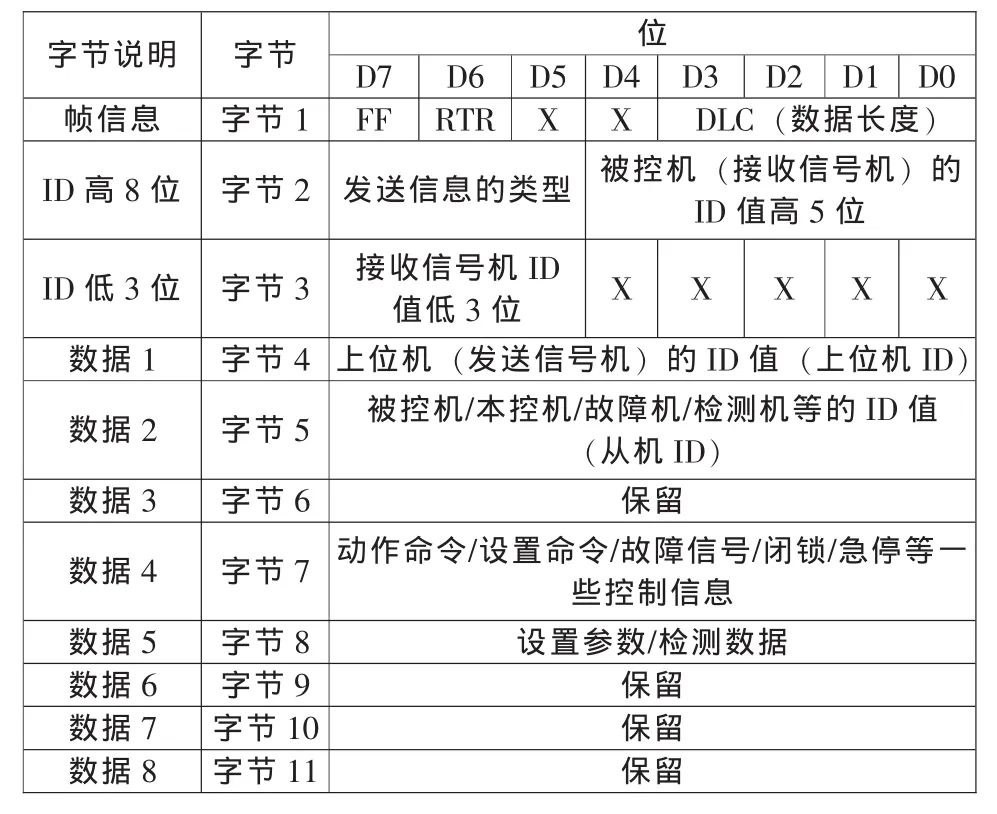
表1 工程报文格式
[1]李全利.单片机原理及接口技术[M].北京:高等教育出版社,2009.
[2]方慎权.煤矿机械[M].徐州:中国矿业大学出版社,1987.
[3]沙宝银,王勇,姜金球,等.基于CAN总线的液压支架分布式测控系统研究[J].工况自动化,2008,3.
[4]李首滨,韦文术,牛剑峰.液压支架电液控制及工作面自动化技术综述[J].煤炭科学技术,2007,5.
[5]张伟,张平,韩玉璞.多节点互控型计算机分布式控制系统的设计[J].计算机测量与控制,2002,4.