基于ARM的便携式PID参数自整定控制器设计
2014-09-10陈子珍阎威武
陈子珍,阎威武
(1. 宁波职业技术学院 海天学院,浙江 宁波 315800;2. 上海交通大学 自动化系,上海 200030)
过程控制系统是一类应用较广泛的调节系统,对工业生产过程中的工艺参数进行自动控制。而PID控制是工业过程控制中应用较广泛的控制规律[1],其结构简单、稳定性好、工作可靠、调整方便。当被控对象的结构和参数不能完全掌握,得不到精确的数学模型,或者控制理论的其他技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来实现,这时应用PID控制技术最为方便。即当使用者不了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,PID控制技术是最适合使用的控制技术[2]。现在的工业过程控制领域仍有近90%的回路应用PID控制策略[3-4],但是PID参数的整定有一定的难度。因此,针对各种工业过程控制的实际需求,笔者研制了一种适用于工程现场,结构简单、使用方便的便携式PID参数自整定器[5],具有重要的理论意义和使用价值。
1 PID参数自整定算法设计[6-7]
由于理想继电反馈在有负载扰动时使系统能对称输出,会导致整定的PID参数存在误差,而且理想继电反馈也不能得到控制过程的静态增益。因此,笔者引入1个输入滞环继电环节来辨识控制对象的传递函数,从而能够获得控制对象的静态增益,减小辨识误差。具有输入滞环继电环节控制系统如图1所示。

图1 具有输入滞环继电环节控制系统结构示意
假设被控对象是二阶加滞后模型,即:
(1)
PID控制器:
(2)
系统的传递函数:
(3)
可以得到PID控制器的3个参数为
(4)
(5)
(6)
式中:a=T1T2;b=T1+T2。通过设定参数τ,可以方便调节PID控制器参数。
2 系统硬件设计
2.1 自整定器结构及工作原理
文中所设计的PID参数自整定控制器主要针对SISO系统[6],系统结构如图2所示。由图2可以看出,当自整定器工作时,需要将自整定器接入到PID控制器的前端,为使参数整定过程对生产过程造成的干扰尽可能小,自整定时采用的是闭环在线整定测试,即让PID控制器和被控对象组成1个内部回路,自整定器作用于该内部回路,避免了开环测试对被控对象平稳运行造成的影响。
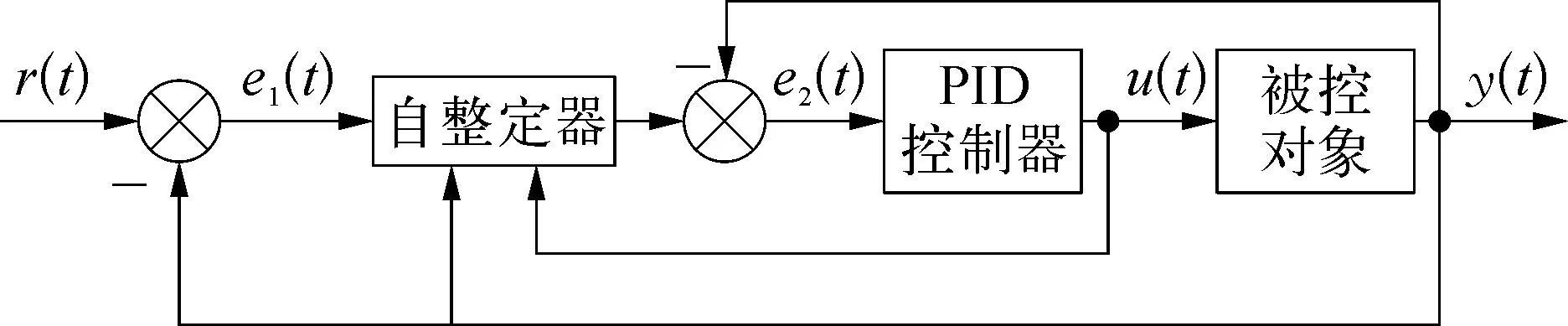
图2 基于ARM微控制器的PID参数
2.2 系统硬件结构与功能分析
便携式PID参数自整定器根据PID参数自整定的原理和实现的功能,能够自动整定PID参数。基于ARM微控制器设计的系统硬件结构如图3所示,其软硬件具备以下功能:
1)完成PID自整定算法。
2)采集2路4~20mA电流信号。
3)根据PID自整定算法的要求,输出4~20mA的电流控制信号。
4)人机接口。通过键盘进行参数的设置、修改,并能够将一些实时信息以及整定的结果等通过LCD显示出来。
5)采用电池供电。
6)可以与微机通信进行功能扩展。
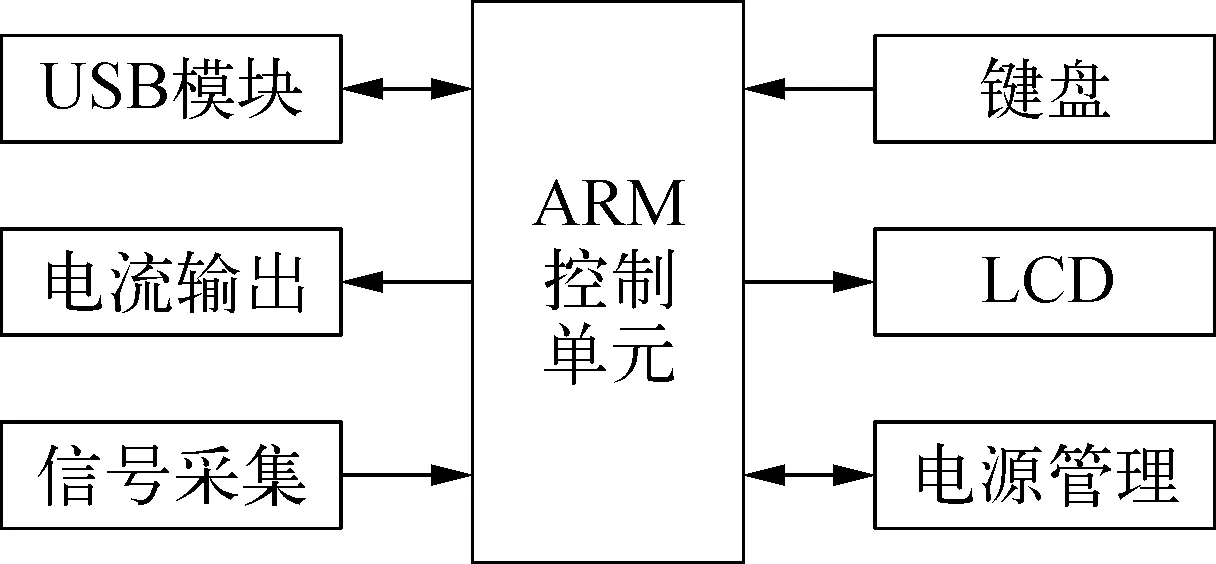
图3 PID参数自整定器硬件结构示意
3 自整定方法的实现
自整定工作模式分为手动模式和自动模式。在手动模式下,用户设定SP值和控制量MV值,设定的SP值与采样的输出量PV值不断进行比较,根据比较结果选择改变MV的值。在自动模式下,用户只需输入设定值SP,系统执行自整定功能。
3.1 系统平衡态获得过程
1)设定SP值。MV的值从1V自动增加。
2)比较PV与SP值。如不相等,PV以±0.03V的幅值进行不断调整。
3)调整PV值。连续采样5个PV值与SP值比较,误差若小于2%时,系统认为获得平衡态。
4)超调补偿(PV值大于SV值的情况)。通过修正MV值来获得平衡态。
平衡态的获得过程如图4所示。系统处于平衡状态后,通过平衡态点的输出噪声获得滞后宽度d,获得方法如图5所示。

图4 系统平衡态的获得过程示意
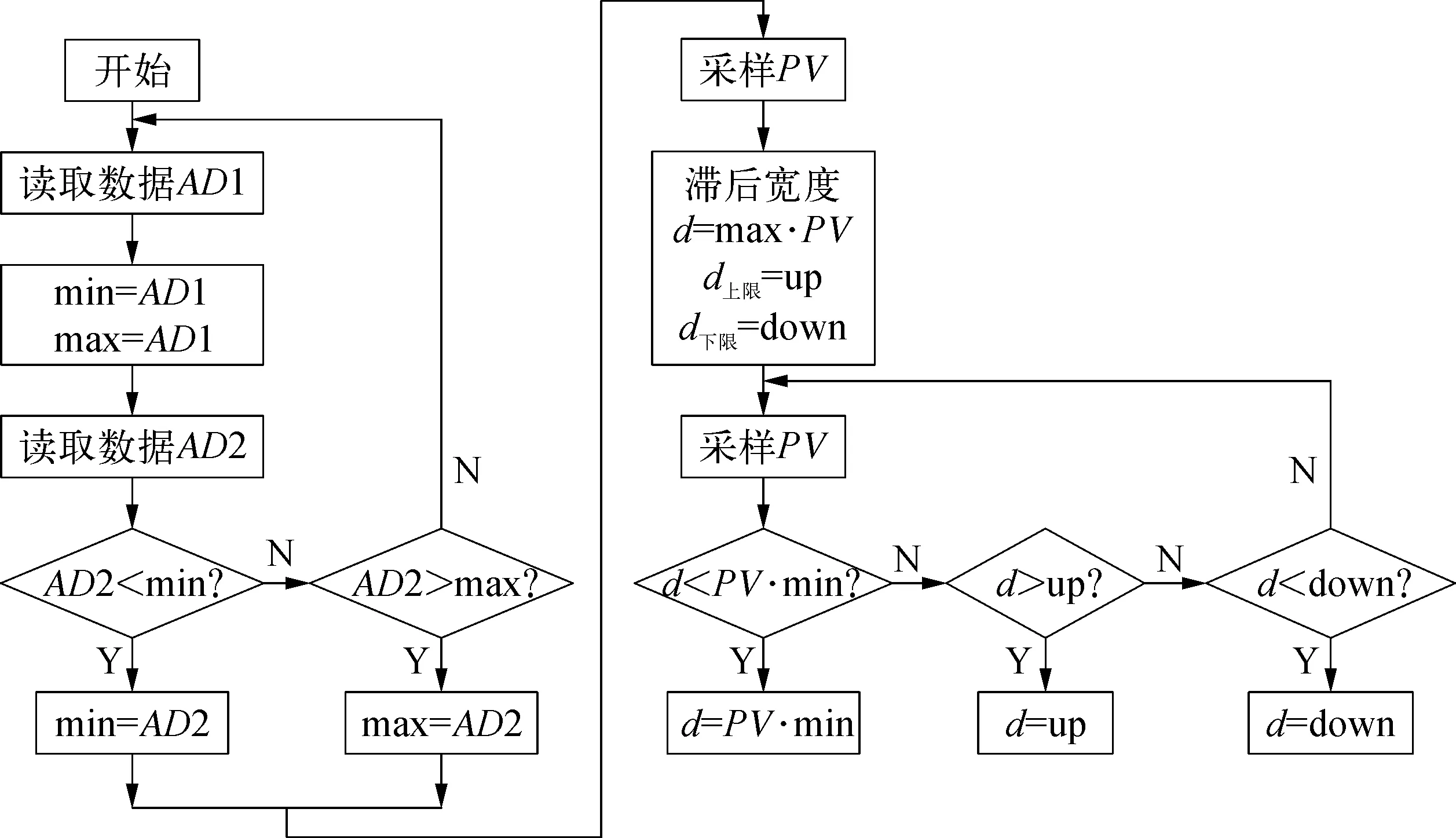
图5 继电器滞后宽度的获取方法
3.2 继电反馈自整定过程
1)自整定条件。系统处于平衡态,得到滞后宽度。
2)MV值调整。当系统处于平衡态,以MV的值为基础增加,增加幅值为MV值的5%或者0.1V(取两者中较小的值)。
3)PV值采样。采样的PV值与滞后宽度比较,若PV值不等于滞后宽度,通过调整MV值(增加或减小,调整幅值为继电器的幅值)调整PV值。
4)PV值确定。重复MV的调整过程,得到10个稳定振荡,由10个稳定振荡(振荡周期和PV的值用4~8次的5个振荡周期来计算)得到的PV值确定PID参数的Ku与Tu,实现参数自整定过程。算法流程如图6所示。

图6 算法流程示意
振荡周期的计算方法:取5个周期中采样值的平均值,然后用该平均值乘以采样周期。
4 结束语
PID是过程控制中最常使用的一种控制算法。而ARM是一种典型的嵌入式微控制器,具有性能高、成本低和能耗小的特点,适用于多种领域,能够支持Linux,Symbian OS和Windows CE等操作系统。文中结合PID自整定理论与ARM微控制器的丰富资源,设计了便携式PID参数自整定控制器,对常规的工程整定方法——Ziegler-Nichols整定法进行了研究,设计实现了使用继电反馈辨识法自整定PID参数,使系统工作在最优状态。
参考文献:
[1]方康玲.过程控制系统[M].武汉:武汉理工大学出版社,2002.
[2]张燕红.模糊自适应PID参数自整定控制器的研究[J].工业控制计算机,2012(8):58-59.
[3]韩曾晋.自适应控制[M].北京:清华大学出版社,1995.
[4]宋洪法,靳其兵,赵梅.基于改进遗传算法的PID参数整定策略[J].北京化工大学学报,2005,32(2):101-103.
[5]徐江华.自整定PID控制的理论、软件及应用研究[D].上海:上海交通大学,2004.
[6]李清泉,郭莉.智能PID调节器[J].自动化学报,1993,19(3):336-339.
[7]ASTROM K J, HAGGLUND T. The Future of PID Control[J]. Control Engineering Practice, 2001, 9(11), 1163-1175.
[8]郝晓弘,杜旭红,王永奇.模糊自适应PID控制的双闭环风压调节系统[J].自动化仪表,2012,30(10):34-38.
[9]张金焕.PID控制系统和模糊自适应PID控制系统的研究及比较[J].武汉理工大学学报(信息与管理工程版),2005(05):292-296.
[10]叶俊华.基于ARM11的嵌入式视频处理终端设计[D].长沙:中南大学,2009.
