干涉仪测向系统相位误差校准方法
2014-09-08何冠良
张 娟,刘 恒,何冠良
(中国船舶重工集团公司第七二四研究所,南京 211153)
干涉仪测向系统相位误差校准方法
张 娟,刘 恒,何冠良
(中国船舶重工集团公司第七二四研究所,南京 211153)
通过分析干涉仪测向系统的相位误差来源,对接收机各通道的相位不一致性、接收机前端无源部分的相位差异、工作环境温度变化及系统噪声引起的相位差变化进行了分析与探讨,并针对不同的误差来源提出了相应的校准方法和设计原则,对于工程实践具有一定的借鉴意义。
干涉仪测向;通道间相位差;动态相位校准;系统噪声;测向精度
0 引 言
干涉仪测向系统一般由天线、接收和处理机构成。干涉仪天线一般由按一定方式排列的天线阵列构成;接收和处理机通过比较各天线单元接收到的信号的相位差来获得目标信号的到达方位信息[1]。由于设计、工艺等方面的影响,接收机前端无源器件很难做到相位一致;接收机无源器件的相位会随着工作时间、温度等的影响产生漂移。上述因素会对系统相位差的计算带来系统相位误差。对上述系统相位误差存在的原因进行分析,并进行系统相位误差校准对提高系统的测向精度具有重要的现实意义。
1 干涉仪测向系统测向误差来源分析
一个两天线单元阵进行干涉仪测向的系统模型如图1所示。图中,d为天线1与天线2之间的基线长度,θ为入射波的到达角度, 则相位差为
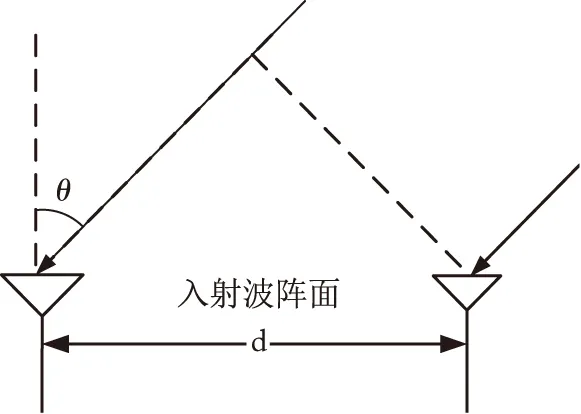
图1 干涉仪测向系统模型

(1)
式中,λ为入射波波长,d/λ=n,则
φ=2πnsinθ
(2)
根据入射波到达天线时的相位差φ可计算出入射波到达方位:

(3)
对电磁波到达方位θ的测量精度进行分析,得到如下公式:
(4)
式中,σθ为测量方位θ的标准偏差,σφ是测量相位差φ的标准偏差,σλ是测量电磁波波长(或频率)的标准偏差,σd是测量基线长度的标准偏差。假定各误差源相互独立,一般而言,电磁波波长λ(或频率)和基线长度d都能加以精确测定,所以在式(4)中主要的误差来源是等号右边的第一项。而引起σφ的主要误差源是接收通道的相位不一致性、热噪声引起的随机相位抖动,以及数字处理引入的相位噪声(主要是量化噪声)等。天线单元相位中心的移动既可造成基线长度的变化,又可引起通道相位不一致,但一般可以做到足够小。随着数字A/D采样芯片位数的提高,数字处理引入的相位噪声(量化噪声)已经很小。因此,要想保证整个干涉仪测向系统的测向精度,接收通道的相位一致性及稳定性显得尤为重要。本文主要从接收通道相位一致性和稳定性等方面入手,对各方面的系统相位误差校准方法进行分析和探讨。
2 接收通道的相位不一致性校准方法
要减小接收机各通道的相位不一致性引起的相位误差,最直接的办法就是提高接收机各通道的相位一致性。随着侦测雷达向更高宽频段发展,从硬件上来实现接收通道的相位一致性已不太现实,单纯依靠工艺来实现的话,调试起来也比较繁杂;又由于接收机中的有源器件和滤波器等器件的相位变化随环境、时间推移等存在差异,需要采用一种动态的校准方式才能满足系统长期工作的需要。针对这种情况,可采用图 2的校准方式来解决[2]。

图2 通道相位不一致性校准框架
如图2所示,在每个通道前加入一级开关控制,开关的两个输入端分别连接到天线阵元和校准信号源,用于选择通道的信号来源。校准信号源内置于接收系统中,通过终端操控产生校准所需的校准信号。校准信号经功分器功分,输出几路同频同相信号给不同的接收通道。同频同相信号经接收通道后产生相位差ξ,ξ即为由接收通道的相位不平衡性引起的相位差。
当接收到的信号通过两路通道测相输出时,相位差中包含了通道不一致性引入的相位误差,即

(5)
(6)
当校准信号源通过功分器功分后产生同频同相信号,通过两路通道测相输出时得到两信道的相位误差中也包含了通道不一致性引入的相位误差,即
(7)
(8)
两者相减后即可消除该组测相通道因通道相位不一致性引入的相位误差,得到信号到达前的真实相位差,即
校准信号源内置于接收系统中,通过终端操控随时产生校准所需的校准信号。系统可根据实际情况随时对接收机进行自动校准,整个校准过程快速便捷,校准后既消除了接收通道开关以后部分的系统误差,也消除了部分随机误差。
3 接收机前端无源部分相位差校准方法
图2中的通道相位校准方案只能对接收通道开关以后部分引起的相位差ξ进行校准,对开关前的通道相位误差β不能进行校准,同时引进了校准源中的功分器及后端线缆引起的相位误差α。这两部分相位差由无源的天线、线缆及功分器引起,开关的相位不平衡性也会带来一定的相位差。由于这部分相位差都是信号频率的函数,可把这部分相位差作为系统差进行校准。因此,这部分相位差可与天线一起进行辐射校准。
辐射校准示意图见图 3所示。自检源进行校准时,测得的相位差为
△φ=(ξ2-ξ1)+(α2-α1)
(11)

图3 辐射校准示意图
辐射校准时,假定辐射信号均为平面波,且到达接收天线时同频等相,则此时测得的相位差为
△φ′=(ξ2-ξ1)+(β2-β1)
(12)
假设待测信号到接收天线前的相位分别是θ1、θ2,则待测信号经整个接收系统后测得的相位差为
△φ″=(θ2-θ1)+(ξ2-ξ1)+(β2-β1)
(13)
而待测相位差为
(14)
△φ、△φ′、△φ″均可通过干涉仪测向系统的测相部分测得,在终端可直接读出这部分数据。实际使用过程中,可通过操控终端控制信号源按既定频点自动扫描,实现自动化校准,大大节省了校准调试时间。这种方法校准的难点在于保证辐射源的信号波为平面波,同时还要保证测试电磁环境相对比较干净,且信号在进入天线前等相位。
4 温度变化引起的相位误差校准
受工作环境及系统功耗影响,系统工作温度存在较大起伏,温度起伏将引起接收通道相位的改变。由公式(4)可知:在干涉仪测向系统中,系统只关心接收机通道间的相位差变化。当各接收通道相位变化随温度变化不一致时,将引起通道间的相位差变化[3]。针对温度变化引起的这部分相位差,可采用以下几种方法来解决:
(1) 尽量选用稳相同批次的器件及线缆,尽量保证接收通道在工艺上的一致性,使接收通道的相位变化随温度变化尽量趋向一致;
(2) 通过一些散热恒温装置,使系统工作温度尽量保持恒定;
(3) 必要时在接收机内部加入相位补偿。根据需要划分为不同的温区,在实验室里得出接收通道随温度变化时的相位变化数据,利用温度传感器得到系统的工作环境温度,调用相应的数据加以补偿。
5 系统噪声对相位测量的影响分析
当存在噪声时,相位合成矢量将偏离原信号矢量的相位[4],如图4所示。
根据正弦定理,由图 4可得
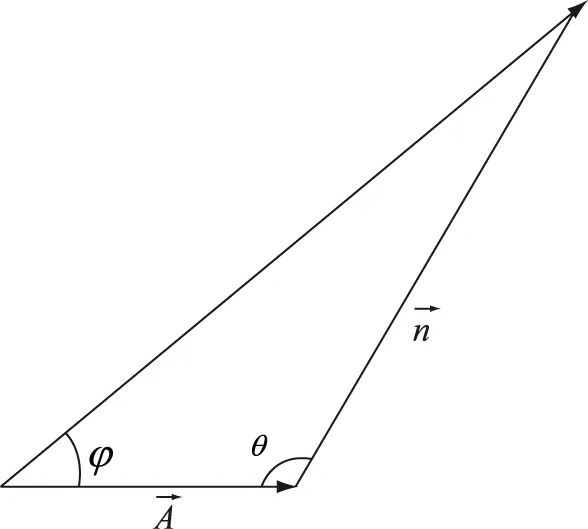
图4 噪声引起的相位偏差

即
n(sinφcosθ+cosφsinθ)=Asinφ
在系统噪声n比较小的情况下,即φ接近于零,sinφ≈φ,cosφ≈1,ncosθ与A相比可忽略不计。
n(φcosθ+sinθ)=Aφ
其中φ为奇函数,其均值为0,方差为
其中,A为被检测信号电压,n为噪声电压,θ为被检测信号电压矢量与噪声电压矢量的夹角,N为噪声功率,S为被检测信号功率。其均方根值为

(15)
由公式(14)可得出信噪比对相位差测量的影响,信噪比越大,它对相位测量的影响越小。为减小相位测量的误差,应尽量提高系统的信噪比。提高系统信噪比的主要方法有[5-6]:
(1) 尽量提高天线增益和接收机前级的增益;
(2) 采用相对小的信号处理带宽,抑制带外噪声,增加信噪比;
(3) 采用多次测量,测量值进行二次处理。
6 结束语
本文对干涉仪测向中各个环节的相位误差来源进行了分析与探讨,并对误差产生的原因进行了详细分析。针对不同的误差来源,提出了相关的校准方法和设计原则,有助于系统设计者在实际工程应用中找到一种合适的方法来消除各个环节引入的系统相位误差,在工程应用上具有一定的指导意义。
[1] 潘琳. 干涉仪测向与相位差变化率定位技术[M].西安:西安电子科技大学,2009:17,26.
[2] 李川.干涉仪测向体制误差性能分析[J].电子测量技术,2011,34(6):116.
[3] 张文旭,司锡才,蒋伊琳.相位干涉仪测向系统相位误差研究[J].系统工程与电子技术,2006,28(11):1632.
[4] 熊立志,漆兰芳,张元培.一种新的天线阵列位置误差校正算法[J].电波科学学报,2004,19:192-194.
[5] 冯成燕,吴援明,刘刚,等.基于改进NLMS算法的通道校正技术研究[J].信号处理,2005,21(6):649-652.
[6] 贺志毅,张峋,郝祖全.一种宽带雷达幅相误差分析与校正方法[J].系统工程与电子技术,2003,25(11):1351-1354.
Phase error calibration methods of direction-finding system of an interferometer
ZHANG Juan, LIU Heng, HE Guan-liang
(No. 724 Research Institute of CSIC, Nanjing 211153)
With the analysis of the sources of the phase error of the direction-finding system of the interferometer, the inconsistent phases in each channel of the receiver, the phase differences in the passive part of the front end of the receiver, the temperature change of the working environment, and the phase difference change caused by the system noise are analyzed and discussed. The corresponding calibration methods and design principles are proposed for different error sources, having a certain reference significance for the engineering applications.
direction finding of interferometer; inter-channel phase difference; dynamic phase calibration; system noise; direction-finding precision
2014-06-12;
2014-07-02
张娟(1982-),女,工程师,硕士,研究方向:雷达信号接收;刘恒(1982-),男,工程师,研究方向:雷达总体;何冠良(1985-),男,硕士,工程师,研究方向:雷达信号处理。
TN957.5
A
1009-0401(2014)03-0023-04
