小型光电吊舱的模块化结构设计
2014-09-06,,,
, , ,
(1.天津航天中为数据系统科技有限公司,天津 300301;2.中国石油集团渤海钻探工程技术研究院,天津 300457)
小型光电吊舱的模块化结构设计
李创1,郗小鹏1,吴宏宇1,孙颖2
(1.天津航天中为数据系统科技有限公司,天津 300301;2.中国石油集团渤海钻探工程技术研究院,天津 300457)
0 引言
光电吊舱是光电稳定平台的一种,它是一个集光、机、电于一体的复杂系统,可以实现在载体运动过程中,包括载体受到冲击、振动时,消除扰动,准确跟踪位置指令,输出稳定的视频图像,被广泛用于军事领域以及公安、消防和环境监测等民用领域[1]。光电吊舱的结构形式受限于其稳定精度以及所搭载的传感器种类和数量的要求,其体积、重量以及整机的结构形式都会有所不同。鉴于上述特点,在光电吊舱结构设计、材料选取和机加装配等环节,都有其特殊的要求。设计中,在保证高的结构刚度和稳定性前提下,力求重量轻、体积小。
1 总体设计与技术指标
根据某型号无人机的载重要求以及飞行特点,不适合挂载重量和体积大的光电吊舱,结合其对稳定精度的要求,选择两轴两框架主体结构形式,选择力矩电机作为方位、俯仰轴系动力源,选择绝对式光电编码器组成位置环闭环反馈元件[2],与控制器一起组成各轴系的位置闭环控制系统,选择双轴光纤陀螺仪作为惯性测量元件,组成惯性稳定回路控制系统。另外,传感器选择高清摄像机和非制冷型红外热像仪组成双光载荷的光电吊舱系统。
根据某型号无人机的性能和对环境监测的能力要求,光电吊舱主要技术指标为:工作范围,方位为360°连续,俯仰为+20°~-85°;方位和俯仰最大角速度为60(°)/s,最大角加速度为90(°)/s2;回转直径为180mm,重量不超过6 kg(不包括传感器);平台稳定精度为0.1mrad,测角精度为1mrad。
2 模块化结构设计
2.1 系统模块划分
光电吊舱的整体结构形式为两轴两框架结构,两框指的是内框架和主框架。内框架(俯仰框架)主要用来承载任务载荷,包括常用的光电传感器,其结构形式随着任务载荷的类型和数量不同而变化;主框架(方位框架)主要承载内框架部件,并实现平台的方位转动,其结构特点决定了吊舱整体的外部形态。两轴指的是方位轴系(垂直轴)和俯仰轴系(水平轴),轴系的回转精度是影响光电吊舱稳定精度的因素之一,也是结构设计过程中的关键考虑因素之一。针对光电吊舱的结构特点,为了提高结构设计的效率,简化设计流程,在吊舱结构设计过程中,采用模块化设计思想,将其整体结构分为俯仰轴系(俯仰左轴端和俯仰右轴端)、方位轴系、内框架、方位支撑和基座5个组件,两轴两框架光电吊舱模块化结构如图1所示。

图1 两轴两框光电吊舱模块化结构
2.2 轴系结构设计
光电吊舱的整个轴系结构设计坚持轴向尺寸尽量小的原则,这样对于俯仰轴系所牵连的内框架,其内部可以有较大的空间,使内框架所携带的任务载荷和其他元器件有更多的选择空间。另外,空心轴的设计在满足结构强度要求的前提下,内孔直径尽量大,有利于整个吊舱线路布局以及编码器和导电滑环等的选型。两轴两框光电吊舱的轴系结构如图2所示。俯仰轴系由俯仰左端轴组件和右端轴组件组成,左端轴组件为俯仰轴系的动力源组件,主要由法兰、力矩电机、轴承、左端轴和轴端挡圈等零件组成。轴承采用四点夹紧固定方式,法兰通过螺钉与方位支撑固定,将左端轴组件固连在主框架上,其详细结构如图3所示。
俯仰右端轴组件主要由法兰、光电编码器、轴承、右端轴、编码器支撑和轴端挡圈组成。右端轴与轴承单向固定,一端游走,法兰通过螺钉与方位支撑固连在一起,其详细结构如图4所示。

图2 两轴两框光电吊舱的轴系结构

图3 俯仰左端轴组件 图4 俯仰右端轴组件
方位轴系通过轴承与基座连接,通过螺钉与方位支撑固连,从而带动整个主框架回转,方位轴系与俯仰轴系的垂直度要求通过方位支撑的结构设计、加工精度来保证。由于方位轴系承受较大的轴向载荷,所以方位轴承选用精密交叉圆柱滚子轴承,而且可以同时承受轴向载荷和径向载荷。另外,方位需要完成360°连续回转,因此,选用导电滑环来实现电气连接。方位轴系组件由方位编码器、消隙齿轮、方位轴、力矩电机、导电滑环和交叉圆柱滚子轴承等组成,其详细结构如图5所示。
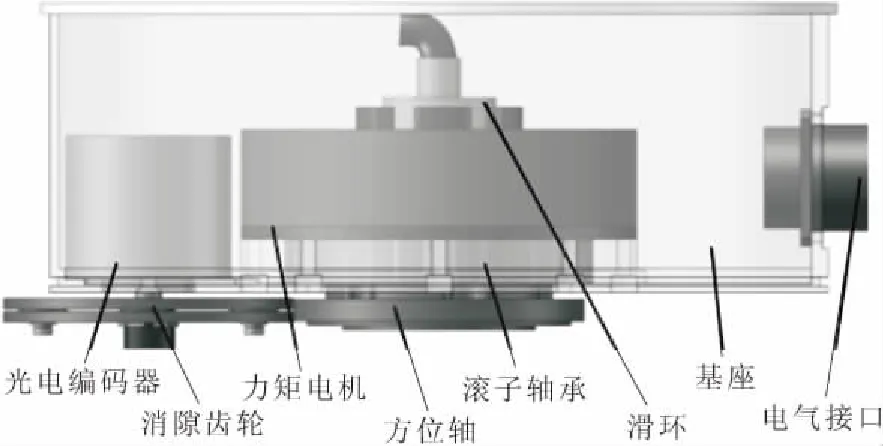
图5 方位轴组件结构
2.3 消隙结构设计
方位轴系的数据反馈模块受到整体结构布局的限制,方位编码器与方位轴系通过一级齿轮传动实现数据同步。为保证其数据采集精度,数据反馈模块在采用小模数6级齿轮精度设计的基础上,设计了一种小型精密、操作简单的齿轮消隙结构,可以消除齿轮传动侧隙,实现无空回转动。
齿轮消隙结构采用双片齿轮与主齿轮啮合,通过双片齿轮的轴向旋转,消除传动侧隙,详细结构如图6所示。
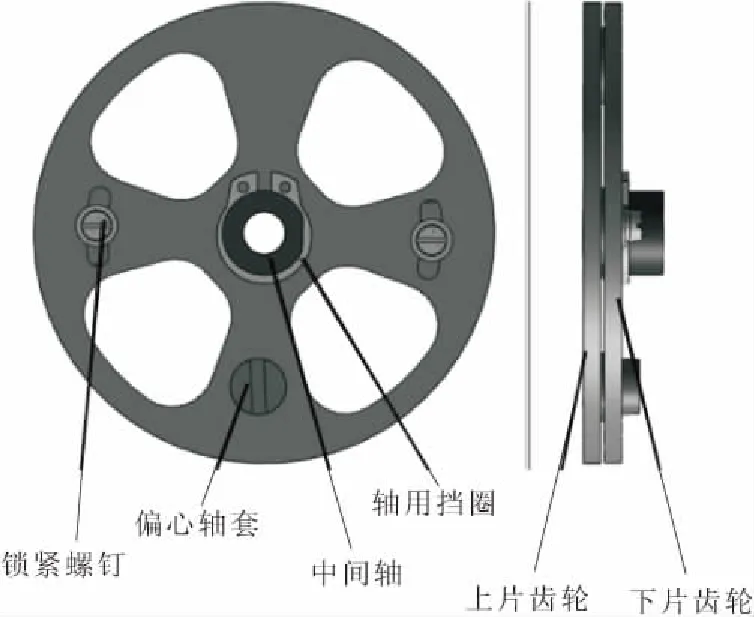
图6 齿轮消隙结构
2.4 整体造型设计
方位支撑是连接俯仰轴系和方位轴系的关键零件,是吊舱两轴转动的载体,因此,它的结构刚度直接决定了整个吊舱轴系的刚度[3],同时它的结构形式也决定了整个吊舱的基本外部形态。对方位支撑的结构采用整体式设计,整个结构由一块原材料直接加工而成,一方面可以保证整体的结构刚度,另一方面可以保证俯仰轴系和方位轴系的垂直度要求。详细结构如图7所示。
此外,光电吊舱的整体造型设计,要结合吊舱的使用要求和飞行要求综合考虑,在满足结构稳定性要求的前提下,还应满足任务载荷视场探测范围的需要,造型设计尽量美观。建立整机三维模型,如图8所示。相比传统的球形转塔结构,该造型结构紧凑,刚度更好,适合中小型光电吊舱。

图7 方位支撑结构 图8 光电吊舱模型
2.5 关键零部件强度校核
光电吊舱轴系的主要承载部件为方位支撑、俯仰轴系左右法兰等零件。根据吊舱的设计要求,方位支撑的最大变形量不能超过0.01mm,左右法兰的最大变形量不能超过0.005 mm,因此,有必要对这些关键零部件进行结构强度和刚度校核。通过有限元分析软件ANSYS对其进行力学仿真。关键零件的材料选择铝合金,密度为2.8×10-6kg/mm3,弹性模量E为69 GPa,泊松比为0.33[4-5]。光电传感器负载为860g,方位转动部分总重为3.8 kg,俯仰转动部分总重为2kg。
首先对方位支撑、左右法兰的模型进行简化处理,去除对力学分析影响不大的小孔、圆角和尖角,简化有限元分析软件对模型的网格的划分操作,提高网格的品质。经ANSYS分析计算后,模型的应力、应变及变形结果如表1所示。
表1 零件仿真结果

零件名称最大应力/MPa最大变形/mm屈服强度/MPa允许变形量/mm左法兰0 153 2×10-525~300 005右法兰0 034×10-625~300 005方位支撑0 1482 7×10-425~300 01
3 结束语
根据某型号无人机的使用要求,设计了一款两轴两框架小型光电吊舱。结合光电吊舱的结构特点,提出了光电吊舱模块化的结构设计与整体造型设计流程。利用三维造型软件和有限元分析软件,对吊舱进行了结构造型和关键零部件的力学仿真分析,验证了其结构设计的合理性和有效性,对后续光电吊舱以及光电稳定平台的设计具有一定的参考价值。
[1] 尹 远,郑 荣.轻型光电稳定平台结构设计[J].机械设计与制造,2011(4):47-48.
[2] 吴凤高.天线座结构设计[M].西安:西北电讯工程学院出版社,1986.
[3] 李明智.直升机载光电测量吊舱结构设计分析[J].光电对抗与无源干扰,1999(2):3-5.
[4] 杨洪涛.四框二轴光电稳定平台框架有限元分析有结构优化[D].长春:中国科学院长春光学精密机械与物理研究所,2006.
[5] 甘至宏.光电吊舱内框架减振系统设计[J].光学精密工程,2010,18(9):2036-2043.
Modular Structure Design of Small-sized Electro-optical Pod
LIChuang1,XIXiaopeng1,WUHongyu1,SUNYing2
(1. CAST Tian jin zhong Wei Aerospace Data System Technology Co., Ltd.,Tianjin 300301,China;2. CNPC Bohai Drilling Engineering Technology,Tianjin 300301,China)
随着光电吊舱应用领域的不断拓宽,对其稳定精度的要求越来越高。同时,对吊舱的整体造型和局部结构设计也提出了更高的要求。在两轴两框架主体结构的基础上,通过模块化结构设计和整体造型设计,设计了一款体积小、重量轻、刚度好的光电吊舱;针对吊舱的精度要求,对数据链传动模块进行了消隙设计;利用CAD软件进行了三维建模,在ANSYS软件中完成了关键零部件的力学仿真校核。该吊舱挂载于某型号无人机上,在环境监测领域得到了成功应用。
光电吊舱;结构设计;模块化设计;力学仿真
Currently,with the rapid development of the application of electro-optical pod,stabilization precision requirements are also increasingly improved,the ability of global modeling and local structure become more and more important. According to modularization structure design and global modeling design,a small volume,good stiffness and light weight type of electro-optical pod is designed on the Basis of the major structure of double axes and double frame. Three-dimensional of electro-optical pod structure and mechanical simulation by three-dimensional and ANSYS software are completed. This electro-optical pod has already been applied in environmental monitoring and control areas.
electro-optical pod; structure design; modular design; mechanical simulation
2014-04-14
TH16;TN29
A
1001-2257(2014)09-0039-03
李创(1984-),男,河南南阳人,硕士研究生,工程师,研究方向为精密伺服系统设计。
