基于吊丝悬架的地面微重力补偿实验系统设计
2014-09-06,,,
, ,,
(中国科学技术大学工程科学学院 ,安徽 合肥 230027)
基于吊丝悬架的地面微重力补偿实验系统设计
李君山,许旻,张世武,褚家如
(中国科学技术大学工程科学学院 ,安徽 合肥 230027)
地面微重力补偿实验系统越来越多地应用于智能助力设备上。ITER装置内受损零件的更换由操作员通过遥操作机器人主机械手操控从机械手完成,为了使操作员操控省力,需要对主机械手进行重力补偿。基于吊丝悬架的微重力补偿方案,设计了一种吊丝摆角测量装置,能够方便有效地实现吊丝摆角的测量。首先对系统进行总体设计,然后对吊丝摆角测量装置进行理论计算及ADAMS运动学仿真,得出了该装置对吊丝摆角测量的放大倍数,接着设计了系统的控制方案,最后对系统进行相关补偿实验,验证了该设计的可行性。
ITER装置;主机械手;吊丝悬架;重力补偿;吊丝摆角测量装置;运动学仿真
0 引言
近年来,地面微重力补偿实验系统不单单用于空间机器人的地面模拟试验,在智能助力设备上也受到越来越多的应用。ITER装置[1]是一个巨大的托克马克,它能够产生大规模的、可以控制的核聚变反应,该装置内受损零件的更换由操作员通过遥操作机器人[2]主机械手操控从机械手完成。为了使操作员操控主机械手省力,需要一套切实可行的微重力补偿实验系统帮助主机械手实现重力补偿。目前,在地面上实现重力补偿的方法主要有以下3种类型[3]:浮力实验系统[4-5],自由落体实验系[6],吊丝重力补偿实验系统[7]。浮力实验系统是采用空气浮力或水体浮力支撑物体,进而补偿物体自身的重力影响,但该方法维护费用较高且实验时需要保证系统整体的密封性。自由落体实验系统是在重力塔内研究物体的失重状态,自由落体法成本高,实验时间很短。吊丝重力补偿实验系统通过吊丝连接的配重块来补偿物体的重力影响,其费用低,便于维护但补偿精度较低。浮力法、自由落体法不适合遥操作机械手的重力补偿,而参考文献[7-8]提及的吊丝重力补偿使用多根吊丝和配重块的被动重力补偿,其设计较复杂,控制不易,补偿精度较低。微重力补偿实验系统采用单根吊丝-拉压力传感器对物体进行主动重力补偿,同时设计了吊丝摆角测量装置对吊丝摆角进行测量,从而实现二维坐标内对物体的位移补偿,设计较简单,易于控制,补偿精度较高。
1 系统机械设计
1.1 系统总体设计
地面微重力补偿实验系统由竖直重力补偿系统及二维水平随动系统[9-11]2部分组成,拟定系统参数如下:
a.二维水平随动系统最大跟踪速度为0.2m/s,移动范围为1.5m×1.5m。
b.竖直重力补偿系统额定提升质量为20kg,最大提升高度为1.5m,最大提升速度为0.2m/s,响应时间为1s。
系统总体三维图如图1所示。地面微重力补偿实验系统主要工作过程:初始状态下,吊丝处于垂直状态;系统工作时,吊丝产生的摆角通过吊丝摆角测量装置测得,二维水平随动系统在伺服电机的驱动下产生对物体的跟随运动,当吊丝再次处于垂直状态时运动停止,实现位移补偿;此时,通过拉压力传感器检测的吊丝拉力与物体重力做比较,伺服电机驱动卷筒转动,从而保持吊丝拉力与物体重力相平衡,实现重力补偿。

图1 系统总体三维
1.2 吊丝摆角测量装置设计
1.2.1 装置设计及理论计算
二维水平随动系统的补偿精度对总体补偿精度有重要影响[12]。因此,设计吊丝摆角测量装置测量吊丝摆角,如图2所示。装置测量原理如图3所示,其中,OC为物体悬挂高度;OA为角度传感器安装高度;AB为角度传感器测量臂长;β为角度传感器转动角度;α为吊丝摆角;CD为物体水平位移;EB为对应CD的传感器位移。

图2 吊丝摆角测量装置
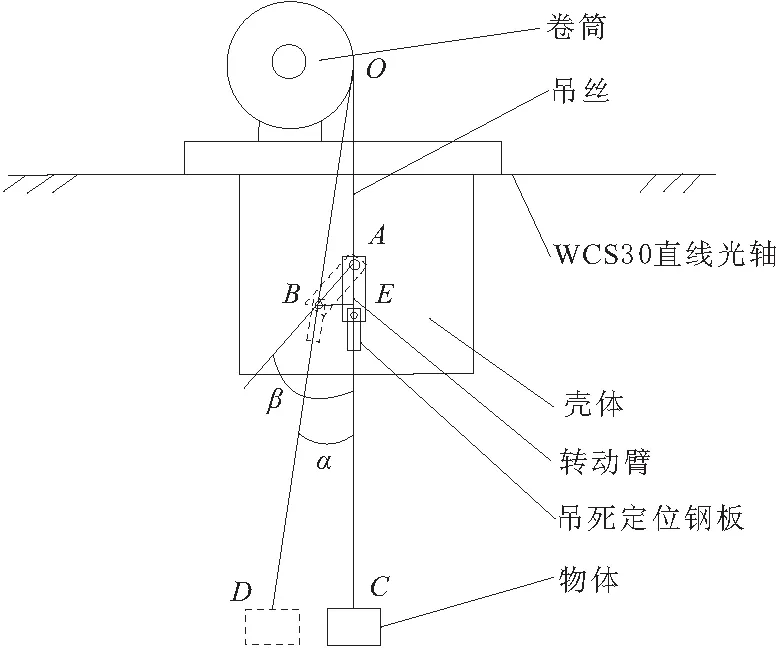
图3 吊丝摆角测量原理
当物体在二维水平面内移动时,对应位移为CD,由图3可得:
(1)
OE=OA+AE
(2)
EB=ABsinβ
(3)
AE=ABcosβ
(4)
综上得到:
(5)
上式即为物体水平位移与角度传感器转动角度的关系式。


(6)
如图2所示,吊丝摆角测量装置包含2个角度传感器,对比测量原理图3可以看出,角度传感器1和角度传感器2的OA不同,AB相同,分别对其进行计算。
a.角度传感器1,OC=1500mm,OA=81mm,AB=8mm,计算结果如表1所示。系统角度传感器1测量值的放大倍数约为11.13倍。

表1 角度传感器1计算数据表
b.角度传感器2,OC=1500mm,OA=56mm,AB=8mm,计算结果如表2所示。系统角度传感器2测量值的放大倍数约为8倍。
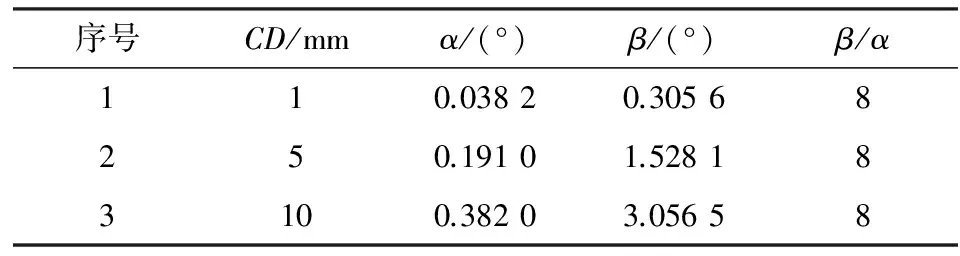
表2 角度传感器2计算数据表
1.2.2 装置仿真分析
利用MSC-ADAMS软件对装置进行运动学仿真分析,为了分析系统的主要特征,去掉对仿真影响很小的零件,采用刚性圆柱杆件代替吊丝,建立物理虚拟样机[13]。
给予吊丝一定的初始角速度,对吊丝和角度传感器进行角度测量,仿真时间为1s,仿真步长为500步,得到如下结果:吊丝摆动终了角度为0.3821°。角度传感器1测量得到的角度值为4.2404°,对应放大倍数为11.10倍;角度传感器2测量得到的角度值为3.049 3°,对应放大倍数为7.98倍。传感器的理论倍数与仿真倍数对比如表3所示。

表3 理论倍数与仿真倍数对比表
由表3可得,吊丝摆角测量装置具有放大倍数,其理论计算值与仿真值相吻合。因此,该装置能够方便有效地实现吊丝摆角的测量。
2 系统控制方案设计
地面微重力补偿实验系统在硬件上采用计算机作为控制芯片,通过PCI数据采集卡采集传感器数据;在软件上采用LabVIEW编写控制程序,具体如下所述。
2.1 竖直重力补偿系统
吊丝拉力由闭环控制,拉力的控制由卷筒、拉压力传感器、计算机和伺服系统构成力电反馈闭环控制系统。吊丝拉力经拉压力传感器反馈到计算机,计算机对给定的拉力值与实际拉力值的差值进行比较,调整输出处理后的控制电压信号,伺服驱动器根据接收的控制电压信号,对电机产生相应的转速控制,如图4所示。
图4 竖直重力补偿系统程序流程
2.2 二维水平随动系统
二维水平随动系统程序流程如图5所示。吊丝摆动一定角度,吊丝摆角测量装置中角度传感器测量得到初始角度电压信号,伺服系统驱动伺服电机工作,从而带动同步带运行,当角度传感器测得电压与初始值相同即吊丝再次处于垂直状态时,伺服电机停止运动,实现位移补偿。

图5 二维水平随动系统程序流程
3 系统整体实验
系统做竖直重力补偿实验,拉压力传感器测量数据曲线如图6所示。图6a中,0~2s,系统保持初始状态,2s时物体有向上移动趋势,拉压力传感器数值(吊丝拉力)变小,2~3s为系统响应过程,3~10s伺服电机向上运动提升负载补偿物体重力,补偿精度为96%,10s时物体运动停止,10~11s为系统停止过程。图6b中,0~2s,系统保持初始状态,2s时物体有向下移动趋势,拉压力传感器数值(吊丝拉力)变大,2~3s为系统响应过程,3~10s伺服电机向下运动降落负载,补偿精度为97%,10s时物体运动停止,10~11s为系统停止过程。
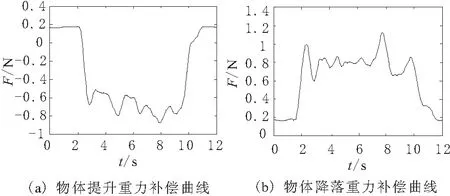
图6 物体竖直重力补偿曲线
对系统进行二维水平位移补偿实验,角度传感器1,角度传感器2测量数据曲线如图7所示。
角度传感器1初始角度为89.856°,1s时,吊丝偏转一定角度,1.7~3s,二维水平随动系统进行位移补偿,角度传感器1最终角度为91.116°,补偿精度为98.5%。
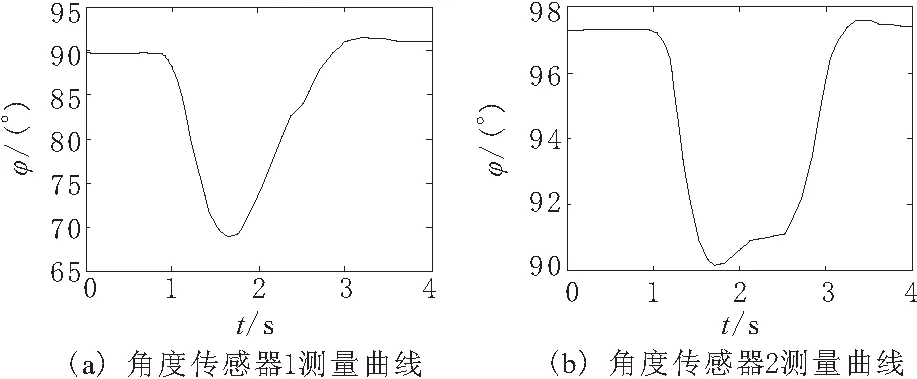
图7 角度传感器测量曲线
同理,角度传感器2初始角度为97.344°,补偿最终角度为97.416°,补偿精度为99%。
综上可得,地面微重力补偿实验系统竖直重力补偿精度为97%,二维水平位移补偿精度为99%,满足设计要求。
4 结术语
提出了一种基于吊丝悬架的主动微重力补偿实验系统,并设计了一种结构简单、精度较高的吊丝摆角测量装置。实验结果表明,系统具有较高的补偿精度,在智能助力设备特别是ITER装置遥操作机械臂上具有一定的应用价值。
[1] 冯开明.可控核聚变与国际热核实验堆(ITER)计划[J].中国核电,2009,2(3):212-219.
[2] 李会军.空间遥操作机器人虚拟预测环境建模技术研究[D].南京:东南大学,2005.
[3] 徐文福,梁斌,李成,等.空间机器人微重力模拟实验系统研究综述[J].机器人,2009,31(1):88-96.
[4] Papadopoulos E.On the design of zero reaction manipulators[J].Transactions of the ASME Journal of Mechanical Design,1996(118):372-376.
[5] Menon C,Aboudan A,Cocuzza S,et al.Self-balancing free flying 3D underactuated robot for zero-gobject capture[C]//54th International Astronautical Federation Congress.Germany:Bremen,2003.
[6] Putz P.Space robotics in Europe:A survey[J].Robotics and Autonomous Systems,1998,23(1):3-16.
[7] Yuichi Sato,Arata Ejiri,Yoshitaka Iida,Shinji Kanda,Tsugito Maruyama,Takashi Uchiyama.Micro-G emulation system using constant-tension suspension for a space manipulator[C]//Proceeding of the 1991IEEE International Conference on Robotics and Automation Sacramento,California-April 1991.1893-1900.
[8] 孙汉旭,王凤翔.加拿大、美国空间机器人研究情况[J].航天技术与民品,1999(4):33-35.
[9] 庞振基,黄其圣.精密机械设计[M].北京:机械工业出版社,2009.
[10] 邓星钟,朱承高.机电传动控制[M].武汉:华中科技大学出版社,2001.
[11] 成大先.机械设计手册[M].北京:化学工业出版社,2004.
[12] 林旭梅,梅涛.地面失重实验系统的控制器设计[J].中国科学技术大学学报,2008,38(5):542-548.
[13] 李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2006.
Design of Ground Microgravity Compensation Experiment System Based on the Suspension Spring
LIJunshan,XUmin,ZHANGShiwu,CHUJiaru
(School of Engineering Science,University of Science and Technology of China,Hefei 230027,China)
In recent years, the ground microgravity compensation experiment system is increasingly used in intelligent assist devices.The replacement of the damaged parts inside ITER device is completed by the teleoperation robot.In order to reduce the operation force of the main manipulator,the need for the main manipulator for microgravity compensation should be concerned.This paper proposes a kind of microgravity compensation system based on the suspension spring and designs an angular measuring device to measure angle of the suspension spring effectively.Firstly,the overall design for the system is done.Secondly theoretical calculation and ADAMS kinematics simulation are carried out to establish the mathematical relationship of the angle of suspension spring and the angular measuring device.Thirdly the control strategy of the system is proposed.The feasibility of the system is verified by the finally compensation experiment.
ITER device;master manipulator;the suspension spring;microgravity compensation;angular measuring device;kinematics simulation
2014-04-15
TP271.4
A
1001-2257(2014)08-0034-04
李君山(1989-),男,安徽六安人,硕士研究生,研究方向为智能材料与机器人。
