基于TDC-GP2的高速时栅位移传感器信号处理系统的研究*
2014-09-06冉扬洁江中伟杨继森李宏伟
冉扬洁,江中伟,杨继森,李宏伟
(重庆理工大学机械检测技术与装备教育部工程研究中心,时栅传感及先进检测技术重庆市重点实验室,重庆 400054)
基于TDC-GP2的高速时栅位移传感器信号处理系统的研究*
冉扬洁,江中伟,杨继森*,李宏伟
(重庆理工大学机械检测技术与装备教育部工程研究中心,时栅传感及先进检测技术重庆市重点实验室,重庆 400054)
随着时栅位移传感器的产业化发展,高速测量需求的趋势日益凸显,提出了一种基于TDC-GP2的时栅位移传感器信号处理系统。该系统采用STM32F4和AD9958产生时栅位移传感器所需的高稳定、高精度励磁信号,采用高分辨率TDC-GP2数字时钟转换器来测量传感器动、定测头的感应信号相位时间差,将测量结果送入微处理器中处理,以此到达以时间测量空间的目的。经实验表明:48对极时栅传感器整周(0~360°)的误差达到±2.3″,该方案优化了电路结构,提高了时栅位移传感器的测量精度。
时栅位移传感器;信号处理;TDC-GP2;AD9958
时栅位移传感器是一种“以时间测量空间”的思想为理论指导,以电磁感应原理为基础的新型位移传感器[1-3]。随着时栅传感器的产业化发展以及市场化竞争日益凸显传感器逐渐向高集成化,高智能化,高精度发展的趋势也越发明显。由时栅位移传感原理可知,当其采用的时间计数器精度越高,时栅位移传感器测得的角度精度越高。目前时栅位移传感器采用407 Hz的行波信号作为励磁信号,然后通过FPGA产生80 MHz插补脉冲最后通过计数脉冲个数从而达到测量角度的目的,该方案仅能够满足其低速条件下测量要求;在高速条件下,为了满足时栅位移传感器的响应速度需要,以及提高硬件电路稳定性。本方案在传统时栅位移传感器信号处理系统的基础上提出利用时间数字转换法,简称TDC,也称之为延时线法的测量原理[4-5],运用ACAM生产的通用型TDC测量芯片对传感器动、定测头的感应信号相位时间差进行精确测量,其测量时间的分辨率可达到65 ps,摆脱了高精度时间间隔测量对高频时钟的依赖,减小了电路设计及应用中的难度,可以将时栅位移传感器的激励信号的频率提高到4 kHz,满足了高速条件下测量需求[5],提高了时栅位移传感器的测量精度。
1 时栅位移传感器工作原理
时栅位移传感器工作原理如图1所示,在时栅位移传感器的定子引入同频率、等幅值、相位互差90°的高精度,高稳定性的正交激励电源us和uc,即:
us=Umsinω0t
uc=Umcosω0t
(1)
式中:Um为激励电源的幅值;ω0为激励电源频率。根据电磁感应原理,则会在时栅位移传感器的定子与转子间的气隙上激发出两层驻波磁场。这两个驻波磁场分别在转子绕组感应出驻波电势,分别为:
es=kUmωsinφcosω0t
ec=kUmωcosφsinω0t
(2)
式中:k为变比;Um为激励信号幅值;φ为电气角;ω0为激励频率;t为时间变量。

图1 时栅位移传感器原理图

图2 时栅位移传感器测量原理
根据叠加原理可知连续绕组的感应电势为时间行波的电动势[6]即:
e=es+ec=2kUmωsin(ω0t+φ)
(3)
由式(3)可知:时栅位移传感器动测头Pa输出信号是标准的带有相位的行波,定测头Pb的输出信号为:
e0=2kUmωsin(ω0t)
(4)
分别将Pa、Pb的输出Ua,Ub信号通过时栅位移传感器信号调理电路模块,调理为方波信号。分别对动测头和定测头感应的信号方波的上升沿进行定时捕获得到t1,t2以及信号周期T,然后根据测量获得的时间参数,计算出时栅位移传感器测得的角度θ为:
θ=(t2-t1)/T×W
(5)
式中W为时机位移传感器的对极节距值。时栅位移传感器测量原理图如图2所示。
2 系统方案
传统时栅位移传感器的信号处理系统是由信号激励模块通过复杂可编程逻辑器件(CPLD)采用DDS技术产生3路正弦信号,通过外接D/A转换器进行数字模拟转换,经放大、滤波后作为时栅位移传感的三相激励信号源。将时栅位移传感器感应出的动、定测头两路信号经过信号调理模块送入到FPGA中,对两路信号采用高精度时钟插补技术实现数字比相,然后将FPGA获得的数据输入到DSP进行数据处理和误差补偿。
基于TDC-GP2的高速时栅位移传感器信号处理系统采用STM32F4微控制器作为控制核心,AD9958数字频率合成器产生两路互差90°的高精度正弦激励信号,经过功率放大后驱动时栅位移传感器的定子激励线圈,传感器的动、定测头感应信号经过信号调理模块处理后,利用TDC-GP2时间数字转换器精确测量动、定测头的感应信号相位时间差,通过微控制器进行当量换算后求得位移测量值,系统的总体方案和流程如图3所示。
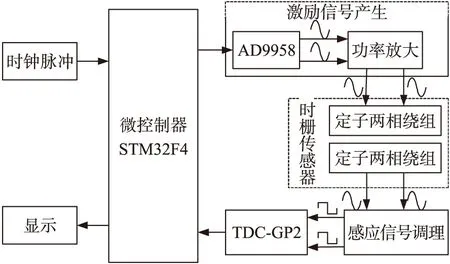
图3 系统总体设计框图
2.1 AD9958数字频率合成器
AD9958是美国ADI公司最新推出的一款双通道DDS高速直接数字频率合成器。该芯片内部集成了两个带DDS核,每个DDS通道能独立的控制频率、相位和幅度,通过一个共用时钟源,可对两个内部同步输出通道独立进行编程[7-9]。这种灵活性有助于纠正由于滤波、放大等模拟信号引起的不平衡。
AD9958的两个DDS核均由32 bit相位累加器和相位-幅度转换器组成。当相位累加器开始技术数并且相位增量(即频率控制字)大于0时,相位-幅度转换器把相位累加器的输出数据作为波形存储器的取样地址将相位信息通操作转换为幅值信息,从而输出数字正弦波[7]。其基本输出为:

(6)
式中:A为输出信号幅值;Φk为前一周期相位值;ΔΦ为相位增量。
根据AD9958主要特性可知

(7)

(8)

(9)
(10)
将式(7)~式(10)代入式(6)可知AD9958通过数字控制每个通道输出的正弦波形为:
(11)
式中:ACR表示幅度控制字;Vmax表示最大电压值;N表示相位累加器数据位数;FWT表示频率控制字;POW表示相位偏移字。
AD9958通过STIM32F4写入幅值、频率、相位控制字,根据式(11)可知,产生所需的相位差90°的两相交流信号。再通过低通滤波器进行调理,产生的两相电压信号作为时栅位移传感器的两相激励源。
2.2 TDC-GP2
TDC-GP2(Time-to-Digital-Converter)时间数字转换器,是德国ACAM公司通用型TDC系列的新一代产品。TDC-GP2主要由TDC测量模块,16位算术逻辑模块(ALU),温度测量模块以及4线SPI串行数据接口组成。具有两个测量范围,其测量时间的分辨率达到65 ps,其输入信号可以选择多模式触发方式,每个通道可以进行4次采样,且可通过寄存器配置选择计算任意2个采样之间的时间间隔。
TDC是以信号通过内部门电路的传输延时来进行高精度时间间隔测量的。测量过程中,只需计算出开始信号和结束信号之间所经过的逻辑门的个数,就可以精确的计算出Start信号与Stop信号之间的时间间隔[10]。
2.3 感应信号调理
由时栅位移传感器的原理可得,动测头和定测头均感应出同频率的感应信号,由于感应信号微弱且杂波较多,需对其进行信号调理,信号调理模块原理图如图4所示,其中包括:仪用差分放大、滤波、非线性放大、整形、光电隔离后得到方波信号。最后将整形后的方波送入微处理器进行处理[11-13]。

图4 信号调理模块原理图
时栅位移传感器感应信号通常都是幅值在几十毫伏的微弱正弦信号,并且杂波较多,因此需要通过信号调理模块进行调理。①采用仪用放大的目的是利用仪用放大电路来对感应信号进行放大处理,该仪用电路具有高阻抗、高共模抑制比、低噪声的特点。②滤波是利用带通滤波电路滤除感应信号中的其他频率成分的谐波,并且可以抑制噪声的干扰。③非线性放大:时栅位移传感器采用过零检测、高频时钟脉冲插补的方法来检测两路信号时间差,为了使过零点更容易被检测出来,提高传感器的灵敏度和稳定性,采用非线性放大电路对信号进行再次放大处理。④整形是为了将再次放大后的信号输入整形电路将正弦波整成方波。
3 数据采集
经信号调理模块输出的信号为方波信号,因此可以在信号的上升沿进行一次采样,当检测到电平的高低变化时就触发一次中断。将发生中断后的时间由TDC-GP2进行采样计算,Start启动测量,Stop 1停止测量,得出周期采样时间,TDC-GP2单元测量控制流程图如图5所示。

图5 TDC-GP2单元测量控制流程图
TDC-GP2在寄存器设置完毕后,用户必须要发送代码“Init”初始化GP2以便TDC能够接收Start和Stop信号。GP2的测量是以Start通道接收到一个脉冲信号开始,以Stop通道接收到指定个数的脉冲信号结束。ALU则是按照设定的模式计算出Start脉冲和Stop脉冲间的时间间隔后产生测量结束中断,若接收到Start信号后在一定的时间范围内没有采样到Stop信号,则TDC产生溢出中断。通过读GP2状态寄存器来分辨这2种中断,对于正常测量产生的中断,接着读取结果寄存器中的数据并发送给上位机,否则,应该跳出中断,重新初始化GP2,准备下一次测量。对于TDC-GP2的测量时序图如图6所示[10]。

图6 TDC-GP2测量时序图
根据TDC-GP2的测量时序,TDC-GP2对于所测得的时间为:
ΔT=T×[Cc+(Fc1-Fc2)/(cal2-cal1)]
(12)
式中:T为参考时间;Cc表示时间周期数;Fc1,Fc2分别表示间隔时间1和间隔时间2;cal1,cal2表示校准时间。
时栅位移传感器感应信号调理后产生的方波信号,利用TDC-GP2的计数方式进行精确的时间差补计数,当方波信号上升沿Start通道开始触发计数,到指定个数方波时,Stop通道接收脉冲信号停止计数,根据式(12)即可得到测量所用的时间,即可得到方波周期。由于TDC-GP2分辨率较高,计数也更为精确,从而提高时栅位移传感器的分辨力和测量精度。
4 数据处理与误差补偿
TDC-GP2采集到的时间值存储到STM32F4的存储器中,由于时栅位移传感器存在电气误差,安装误差等,因此需对STM32F4寄存器的值进行数据预处理,可以直接调用STM32F4内部的DSP指令集对存储的时间值做平滑滤波,以减小上述误差项[14-16]。然后根据公式可以计算出时栅位移传感器测得的角度值为:

(13)
式中:ΔT为时间差;T为信号周期;W为时栅位移传感器的节距(48对极时,W=360°/48=7.5°)。
传感器的测量分辨力为:
δ=(W×tp)/T
式中:W为时栅位移传感器的节距;T为传感器的信号周期;tp为时间测量的分辨力(65 ps)。根据传感器的测量分辨力计算式,可得测量分辨力为:

时栅位移传感器的结构同电机内部结构相似,由式(13)计算出来的测量结果中含有由时栅位移传感器开槽所引起的齿谐波,其谐波成分是比较复杂的,如图7所示为48对极励磁信号为4 kHz的时栅位移传感器谐波误差成分。
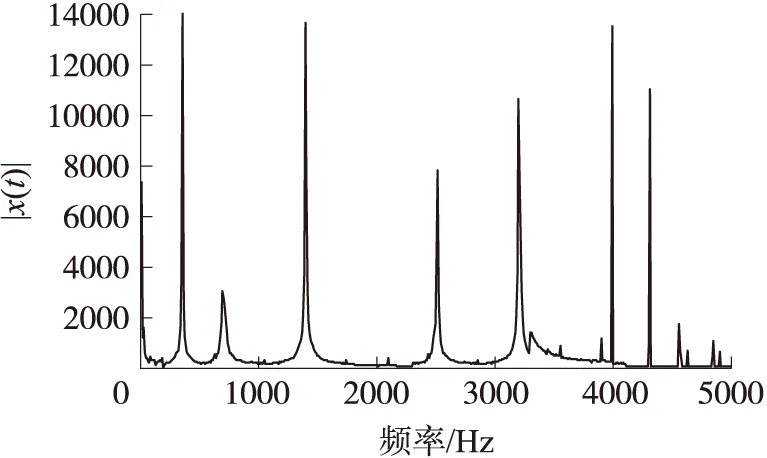
图7 48对极时栅位移传感器单边频谱图
因此,对时栅位移传感器进行误差补偿是提高时栅位移传感器测量精度的有效措施。本方案选择的误差修正方法为傅里叶谐波修正法,其方法是通过对其采样值进行分析,可以得出其有效的误差成分,误差表达式为:

(14)
在知道其谐波成分后通过计算机,可以拟合出一条含有相同谐波成分的理想误差曲线,用式(13)减去计算机拟合出曲线,按这种上面的步骤,连续修正3次。最后将修正后的值转换成度(°)分(′)、秒(″)的形式显示出来。
5 实验结果
为了检验该系统的性能,将研制的信号处理电路板进行如下实验。将时栅位移传感器和光栅用弹性联轴器进行同轴安装,以精度为±1″光栅测得值为真值,时栅位移传感器测得值为测量值,两者之差即为时栅误差值,具体的实验装置如图8所示。计算机通过RS-232接口采集时栅位移传感器和光栅数据,对系统的测量误差曲线实时显示,如图9所示。
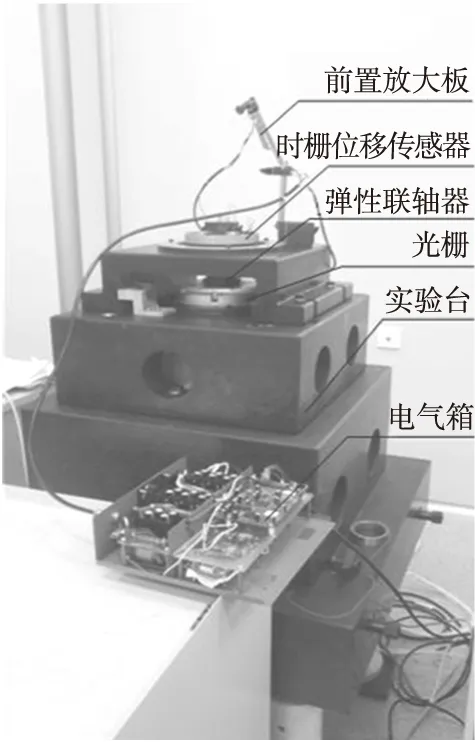
图8 实验装置
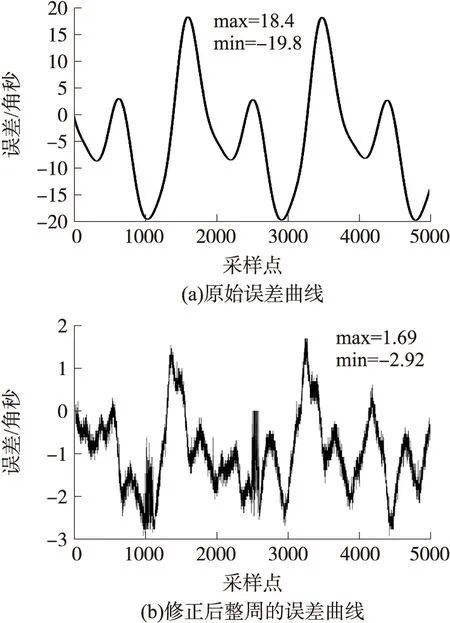
图9 时栅位移传感器误差曲线
6 结束语
本方案选用STM32F4和AD9958可以产生高度,高稳定性的两相正交励磁信号;使用TDC-GP2完成了对感应信号时间间隔的测量,系统能够精确地测量2个脉冲信号的时差,其分辨率达到65 ps,由此可看出采用TDC法测量时差可以优化时栅位移传感器电气箱的结构,提高了测量的精度,促进了时栅位移传感器产的产业化和多元化发展。
[1] 彭东林,张兴红,刘小康. 基于时空转换的精密位移测量新方法与传统方法的比较[J]. 仪器仪表学报,2006,27(4):423-426. [2]彭东林,刘小康,张兴红,等. 时栅位移传感器原理与发展历程[J]. 重庆理工大学学报(自然科学版),2010,24(10):40-45.
[3]彭东林,张兴红,刘小康,等. 场式时栅位移传感器研究[J]. 仪器仪表学报,2003,24(3):321-323.
[4]冯志辉,刘恩海,岳永坚,等. 基于FPGA延迟线插入法的半导体激光测距[J]. 光电工程,2010,37(4):53-59.
[5]章坚武,张数明. TDC-GP2在激光测距传感器中的应用[J]. 仪表技术与传感器,2009,(8):74-76.
[6]杨继森,江中伟,许强. 基于AD9959与STM32 F4的时栅位移传感器电气系统设计[J]. 传感技术学报,2013,26(8):1050-1054. [7]张静,张流强,李跃文,等. 基于FPGA的高精度直接数字频率合成器设计[J]. 重庆工学院学报(自然科学版),2009,23(8):144-148.
[8]David B,John K. Synchronized Synthesizers Aid Multichannel Sytems[J]. Microwave and amp;RF,2005,44(9)57-58,61-70.
[9]董国伟,李秋明,赵强,等. 基于FPGA的直接数字频率合成器的设计[J]. 仪器仪表学报,2006,27(z1):877-879.
[10]岱钦,耿岳,李业秋,等. 利用TDC-GP21的高精度激光脉冲飞行时间测量技术[J]. 红外与激光工程,2013(7):1706-1709.
[11]彭东林,肖伟,郑方燕,等. 基于时栅传感器的编码器信号分析[J]. 重庆理工大学学报(自然科学版),2011,25(1):82-84.
[12]张京娟,张仲毅,刘俊成,等. 一种新型的旋转变压器测角误差标定技术[J]. 仪器仪表学报2010,31(1):49-153.
[13]郑方燕,王宝珠. 基于SOPC时栅位移传 感器信号处理系统设计[J]. 传感技术学报,2012,25(10):1430-1432.
[14]孙慧卿,郭志友. 传感器的误差补偿技术[J]. 传感技术学报,2004,17(1):90-92.
[15]Pradeep Kumar,Miguel Levy. On-Chip Optical Isolation Via Unidirectional Bloch Oscillations in a Waveguide Arry[J]. OpticsLetters,2012,37(18):3762-3764.
[16]陈自然,彭东林,王先全,等. 基于MATLAB的时栅位移传感器的误差曲线与拟合研究[J]. 工具技术,2008(8):85-86.

冉扬洁(1990-),女,硕士研究生,从事仪器仪表工程技术研究,ryj900326@163.com;

杨继森(1977-),副教授,博士,主要从事计算机辅助测试与智能传感器研究,ywei@ cqut.edu.cn。
TheResearchofHighSpeedTimeGratingDisplacementSensorSignalProcessingSystemBasedTDC-GP2*
RANYangjie,JIANGZhongwei,YANYJisen*,LIHongwei
(Engineering Research Center of Mechanical Testing Technology and Equipment,Ministry of Education,Chongqing Key Laboratoryof Time-Grating Sensing and Advanced Testing Technology,Chongqing University of Technology,Chongqing 400050,China)
With the industrial development of the time grating displacement sensor,and its trending in the high-speed measurement has became increasingly prominent,we put forward a time grating displacement sensor signal processing system based on TDC-GP2. The system use STM32F4 and AD9958 to generate high-stability,high-precision excitation signal of time grating displacement sensor,use high-resolution TDC-GP2 digital clock converter to measurement induced signal phase time difference,then we put measurement results into the microprocessor processing,in order to reach the purpose that time measurement space。The experiments show that 48 pole time grating displacement sensor whole cycle(0°~360°)error reach ±2.3″,the program optimizes the circuit structure and improve the measurement accuracy of time grating displacement sensor.
time grating displacement sensor;signal processing;TDC-GP2;AD9958
项目来源:国家自然科学基金项目(51205434);重庆理工大学研究生创新基金项目(YCX2013215);重庆市教委科学技术研究项目(KJ1400904);重庆市科技计划项目(cstc2014jcyjA70003)
2014-06-11修改日期:2014-10-20
TP274
:A
:1004-1699(2014)12-1654-05
10.3969/j.issn.1004-1699.2014.12.013
