双参数三维无源测距方法*
2014-09-05尚海
尚 海
(中国人民解放军91999部队,山东 青岛 266003)
双参数三维无源测距方法*
尚 海
(中国人民解放军91999部队,山东 青岛 266003)
为了提高飞行器对地面目标测距方法的有效性,提出了一种双参数三维测距方法.计算并分析了测距方法的定位误差几何分布,仿真结果验证了该方法的正确性.
被动测距;方位角;质点运动学;俯仰角变化率
在现代电子战争中,由于无源定位技术可以在不暴露自己位置信息的情况下实现对陆、海、空目标的定位,因此这种技术对于增强定位系统在复杂电磁环境下的生存能力具有重要的意义[1-4].通过测量目标的方位角和俯仰角以及方位角速度和俯仰角速度信息可以获得飞行器相对目标的距离.
笔者拟对双参数三维无源测距方法进行研究与分析,推导其定位误差的表达式,计算得到其需要满足的可观测性条件.同时,对目标的定位误差几何分布( GDOP) 进行计算分析,最后得到能够实现更快、更精确的定位方法的结论.
1 三维测距原理
方位角和俯仰角及其变化率是常用的无源测距观测量,由方位角和俯仰角定义如下:

(1)

(2)
因为目标辐射源的方位角、俯仰角由于观测器运动而随时间变化,所以可以通过无线电等手段测量到方位角速度和俯仰角速度.对(1),(2)式分别求导得到方位角速度和俯仰角速度为:
(3)
(4)

(5)

(6)
(5)式被称作利用方位角变化率信息的测距方法,(6)式被称作利用俯仰角变化率信息的测距方法.
由(5)式可知,如果通过某种方法可以测量得到任意时刻的方位角和俯仰角以及方位角速度信息,然后再通过导航设备得到这个时刻的观测器运动速度,这样就可以求出观测器和目标的距离,达到测距的目的.
同样,由(6)式可知,如果通过某种方法可以测量得到任意时刻的方位角和俯仰角以及俯仰角速度信息,然后再通过导航设备得到这个时刻的观测器运动速度,同样可以求出观测器和目标的距离,达到测距的目的.
由于(5)、(6)式都需要测量角度及其变化率,所以这2种测距方法又被称作双参数测距方法,简称双参数法.
2 测距误差及可观察性分析
在方差(5)式中,假设获得的方位角、俯仰角、方位角速度和观测器运动速度等观测信息含有误差,并且这些零均值的误差之间相互独立,将(5)式对这些参数求全微分,得到利用方位角速度定位的三维测距误差方差为
(7)

由(7)式可知,当观测器向目标径向运动时(见图1a))或观测器在目标斜距矢量所在的等方位面中运动时(见图1b)),方位角变化率都等于0,距离的方差将变得无穷大,在这2种情况下无法实现测距.当目标出现在观测器正上或正下方时(见图1c)),俯仰角将变为90°,距离的方差也将变得无穷大,此时也无法实现测距.

图1 (5)式的测距误差及可观察性分析
用同样的方法,在方差(6)式中,假设获得的方位角、俯仰角、俯仰角速度、观测器运动速度等观测信息含有误差,并且这些零均值的误差之间相互独立,将(6)式分别对以上观测信息参数求全微分,得到利用俯仰角速度定位的测距误差方差表达式为
(8)

由(8)式可知,当目标出现在观测器运动的径向方向上时(见图2a)),俯仰角速度会变为0,距离的方差将变得无穷大,此时无法实现测距.当观测器在以目标为中心的等俯仰角锥面上运动时(见图2b))或者观测器水平运动且目标也在同一水平面上时(见图2c)),俯仰角速度都会变为0,距离的方差也将变得无穷大,此时同样无法实现测距.

图2 (6)式测距误差及可观察性分析
3 测距仿真及其分析
假设观测器沿Y轴方向以600 m/s的速度匀速等高地水平飞行,飞行的高度为5 000 m,σβ=σε=1.74 mrad,σvx=σvy=σvz=0.1 m/s,由于利用(5)式的定位法可以单次即时测距,如果在运动过程中测量到某一时刻的角度、角度变化率、速度信息,那么由(7)式可以计算得到目标在任一时刻、任意点处的测距方差分布,即测距误差的几何分布图(GDOP),如图3所示.同样,由(8)式可计算得到理论误差的等高线分布图如图4所示.

图3 (5)式的测距误差的几何分布图
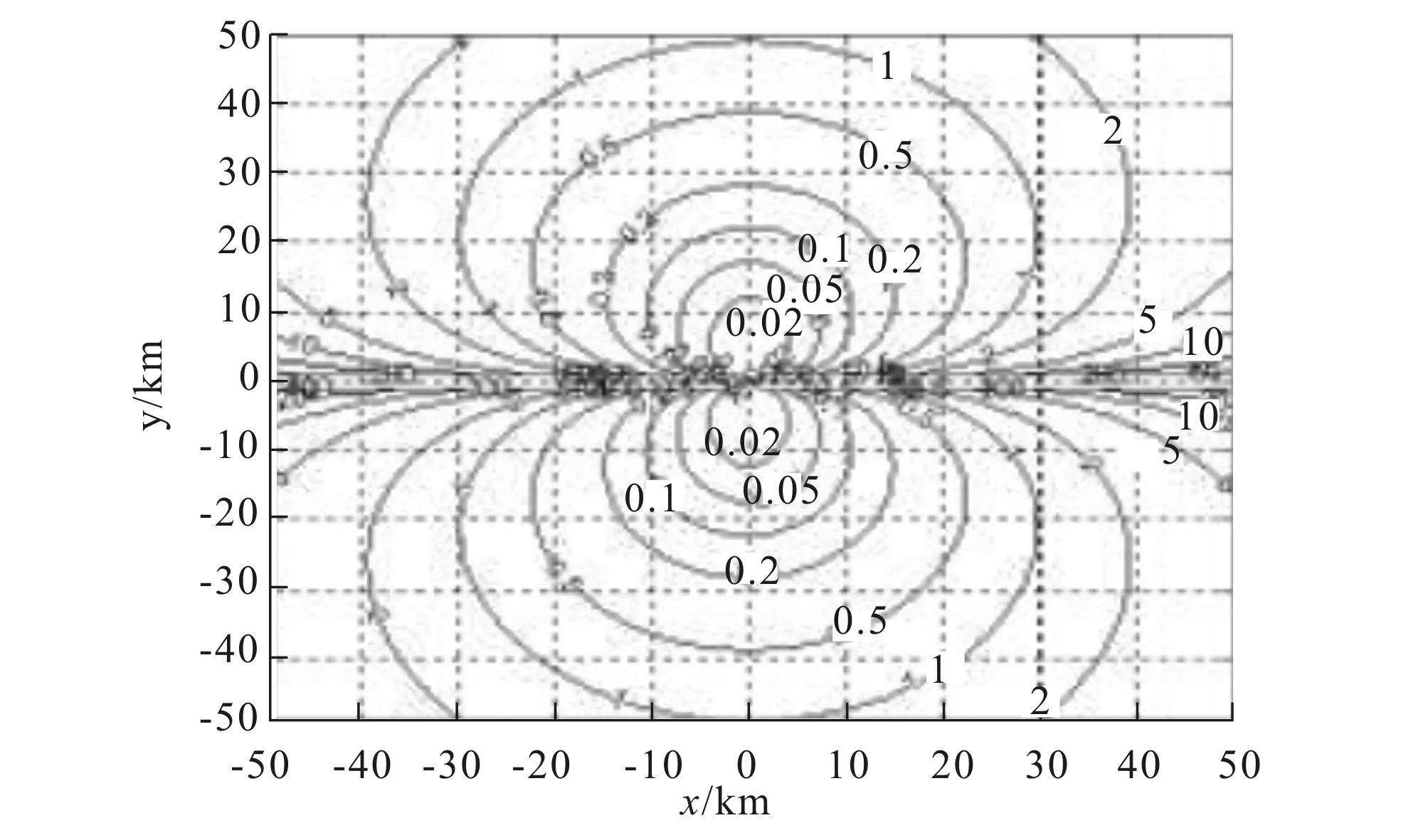
图4 (6)式的测距误差的几何分布图
通过理论研究和仿真结果的分析,可以得出以下结论:(1)在观测器运动方向上的目标是不可观测的;(2)测距相对误差受方位角速度的测量误差、俯仰角速度的测量误差的影响比较大;(3)随着距离的增大,单次测距的测距相对误差也增大.
4 结语
无源定位技术是世界各军事强国重点发展的重要研究领域之一.笔者主要提出并讨论了一种利用方位角和俯仰角以及方位角速度和俯仰角速度信息的无源定位方法,该算法计算简单,具有很强的实用性.本文所得结论对于利用方位角和俯仰角信息的机载、星载干涉仪定位的应用具有理论指导意义和实际应用价值.
[1] BECKER K.An Efficient Method of Passive Emitter Location[J].IEEE Trans. on AES,1992,28(4):1 091-1 104.
[2] HUANG Z T,ZHOU Y Y,JIANG W L.Joint Estimation of Doppler and Time-Difference-of-Arrival Exploiting Cyclostationary Property[J].IEE Proceedings-Radar Sonar Navigation,2002,149(4):161-165.
[3] 王 鼎,曲阜平,吴 瑛.一种基于空域和频域信息的固定单站无源定位跟踪改进算法[J].电子与信息学报,2007,29(12):2 891-2 895.
[4] 冯道旺,李宗华.一种单站无源定位方法及其可观测性分析[J].国防科技大学学报,2004(1):68-71.
[5] 李宗华,冯道旺.固定单站对三维运动辐射源无源定位算法及可观察性分析[J].信号处理,2004,20(2):117-121.
[6] 曲长文,徐 征.一种新的基于角度和时差的稳健定位跟踪算法[J].信息处理.2011,27(2):230-236.
[7] 许耀伟,周一宇,孙仲康.引入测频信息进行无源被动定位的方法研究[J].国防科技大学学报,1998,20(5):61-65.
[8] 万 方,丁建江,陈昌孝.固定单站无源定位与跟踪方法应用[J].活力与指挥控制,2011,36(7):61-64.
(责任编辑 陈炳权)
ResearchonThree-DimensionalPassiveRangingMethodofTwoParameters
SHANG Hai
(91999 Troops,Chinese People’s Liberation Army,Qingdao 266003,Shandong China)
To guarantee the effectiveness of aircraft-to-ground-target ranging algorithm,one three-dimensional ranging method with two parameters is presented.Analysis of the method is discussed,and then the localization geometric dilution of precision is computed.Corresponding computer simulations have been done to prove the correctness and effectiveness of the method.
passive ranging;azimuth angle;particle kinematics;the change rate of pitch angle
1007-2985(2013)06-0050-03
2013-10-30
总装备部基金资助项目(5140104C703CB0102)
尚 海(1971-),男,吉林省吉林市人,中国人民解放军91999部队工程师,主要从事数字信号处理、无源定位等研究.
TN971
A
10.3969/j.issn.1007-2985.2013.06.012
