三维激光扫描应用步入新高度
2014-09-05
近年来,随着三维激光扫描系统的普及,其应用领域不断扩大,如古迹保护、遗址测绘、建筑测量、城市模型、水电大坝、滑坡变形监测等行业都有涉及,它可以根据用户的需要提供极为丰富的三维立体空间模型及三维定量分析,有着很高的社会经济效益。
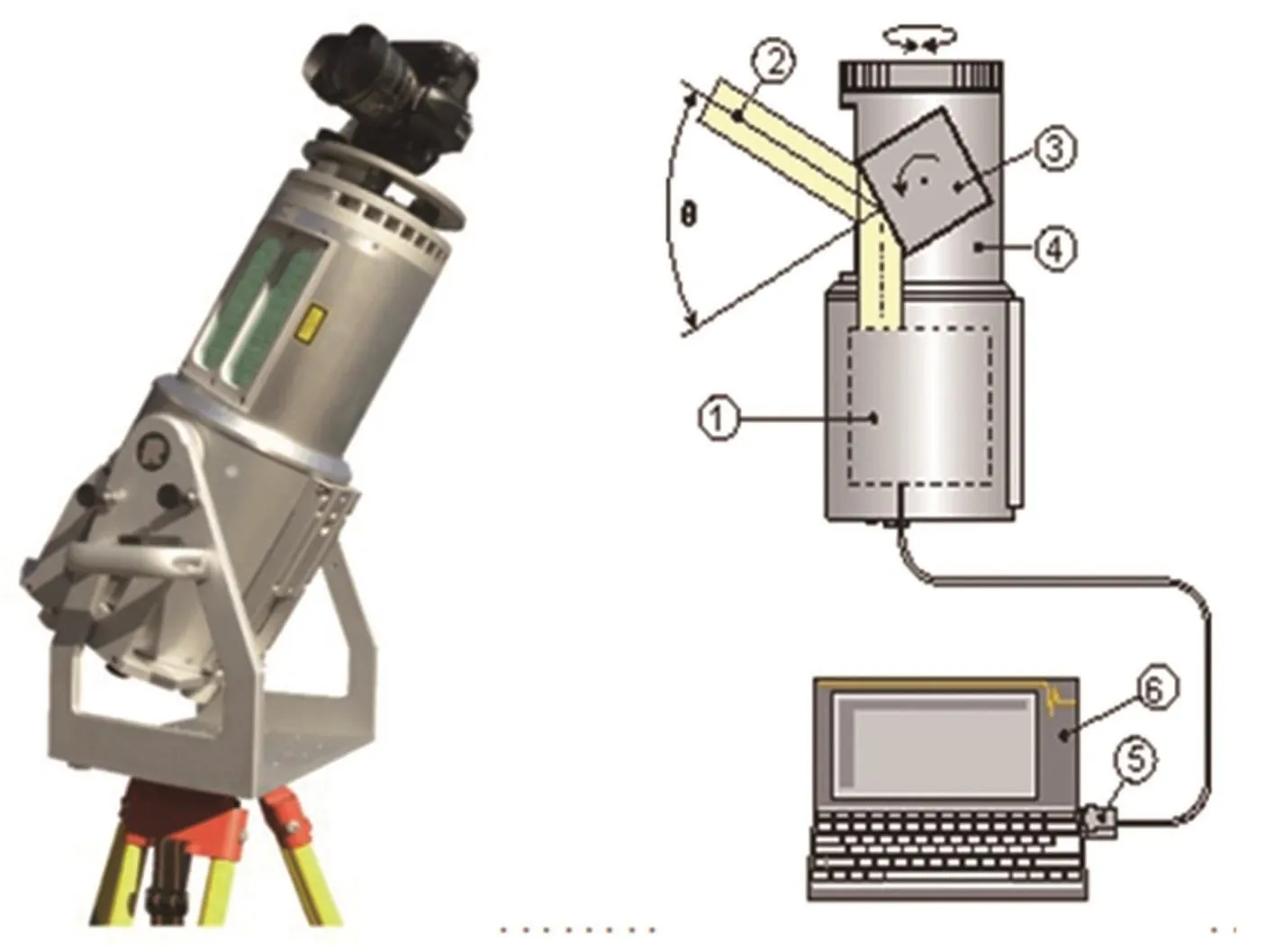
>>图1 RIEGL LMS-Z420i地面激光扫描系统
与传统的单点测量方式不同,三维激光扫描测量仪采用面扫描的测量方式,获取被测量目标表面大量的高精度三维点,满足了高精度逆向工程对三维点的数据量的需求。作为现代高精度传感技术,三维激光扫描测量仪可以深入到复杂的环境和现场进行扫描操作,并直接将各种大型的、复杂的、不规则实体的三维数据完整地采集到计算机中,从而快速重构出扫描物体的三维模型。同时,由于搭载了高像素的数码相机,它所采集的三维激光点云数据不仅包含目标的空间信息,而且记录了目标的反射强度信息和色彩灰度信息。通过对三维点云数据的后处理,可以实现分析、量测、仿真、模拟、监测等功能。以地面三维激光扫描仪为例(图1),它具有高达12000点每秒的数据采集速率,点位精度可以达到6mm,对于一般场景的全景扫描仅需十几分钟,且仪器连接、设置简单,不需要复杂的操作。
激光点云成果可划分为为两类,其中,二维成果中,各种线画图、正射影像等均可用CAD等常用软件打开并编辑,进行相关的量测等操作;所有的三维产品也可以导出为各种常见格式,用户可以在一般三维软件上对其进行浏览与分析。
MicroStation是一款多用途绘图软件,它支持多种不同硬体平台,包 括 Intergraph、IBM、HP、SUN、DEC、SGI等工作站级电脑及PC与MAC等个人电脑,及多种操作系统,包括UNIX、linux及Windows。它所支持的硬体平台及操作系统已覆盖目前世界上所有较为知名的硬体厂商。因此,用户可以根据使用需要及效率需求自由选择所需的硬体平台及操作系统。早在AutoCAD的用户还处在2.5D的绘图环境中时,MicroStation的用户已然在完整的3D环境中优游操作。而符合OSF/MOTIF标准的图形化使用介面及其它众多辅助作图工具,MicroStation代表了新一代电脑辅助绘图软件的标准。同时,针对建筑、桥梁、管道等众多领域的专业插件的开发与使用使其在工程设计施工领域独占鳌头。
正是基于MicroStation能够处理数以亿计的激光扫描点云数据,并且能够兼容栅格影像的优点,我们将其引入到激光扫描数据处理中。
深入应用
常规测量手段在面对一些无法接触、运算较为复杂的测量任务时稍显薄弱,如剖面测量、多点高密度测量等。由于激光点云具有三维坐标属性,且点云密度极大(可以达到2cm的点云间隔),在一些需要利用坐标进行分析计算的相关应用中也极具使用价值;辅以高分辨率影像可以使点云效果更佳逼真。
以某桥梁(桥墩)变形检测以及桥梁三维建模项目为例。首先导入扫描点云及扫描时拍摄的目标影像,因为影像是经过配准的(即影像平面坐标与扫描点云的三维坐标相对关系经过计算已经得出),在MicroStation中影像与点云的位置是完全吻合的,显示效果如下。这其中的主要操作对象还是激光点云,叠加影像是为了增强可视性,同时可以利用影像的清晰度和分辨率对点云处理进行质量控制,毕竟,点云的数量始终是有限的,如果完全利用点云进行分析和建模等是会带来一定的偏差(结构拐角等地方),而影像的像素则记载了目标表面的准确属性。
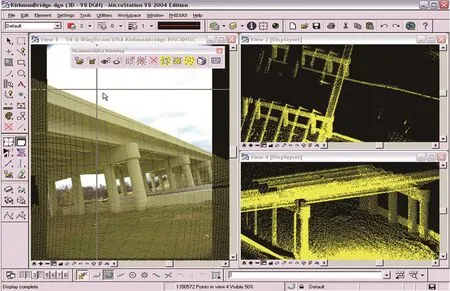
>>图2 导入的激光点云与影像
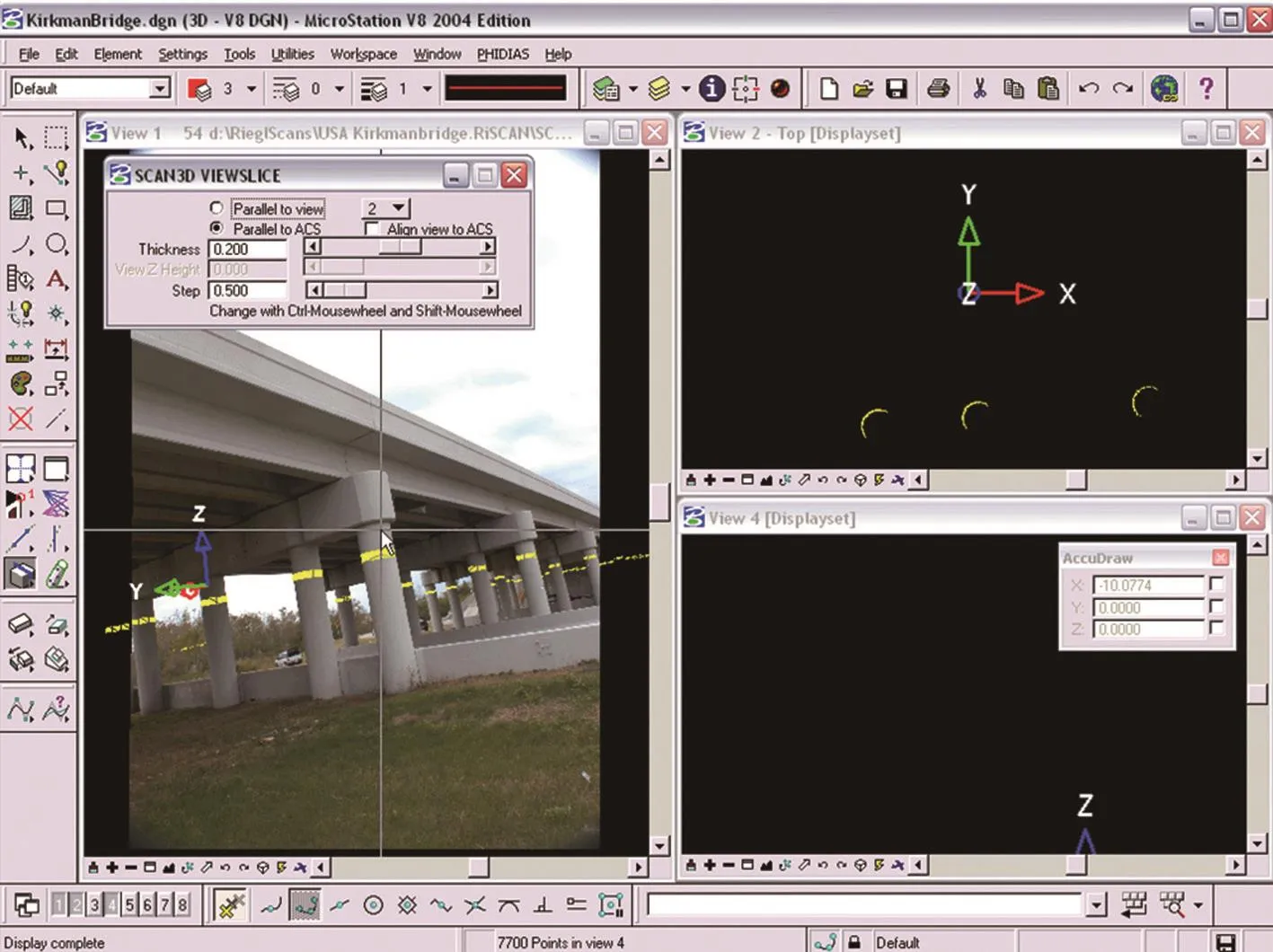
>>图3 剖面截取
在实际应用过程中,用户可以任意指定剖面截取的方向,使用Profile功能将点云沿指定方向进行移动(剪切)并可以在影像上准确地了解到剖面的位置,截取出的剖面点云清晰,直观。在本项目中由于桥墩是圆柱形,因此得到的剖面点云是一个圆形。将桥墩不同高程面上的剖面圆绘制出来以后就可以利用其圆心坐标进行桥墩的偏移量计算了。若是需要测量桥拱的线性,只需要将剖面方向进行改动就可以迅速得到需要的剖面点云。
在截取了需要的剖面点云之后,还可以利用MicroStation`里功能强大的三维建模工具对其进行相关运算,建立整个目标物的三维模型。如图6。
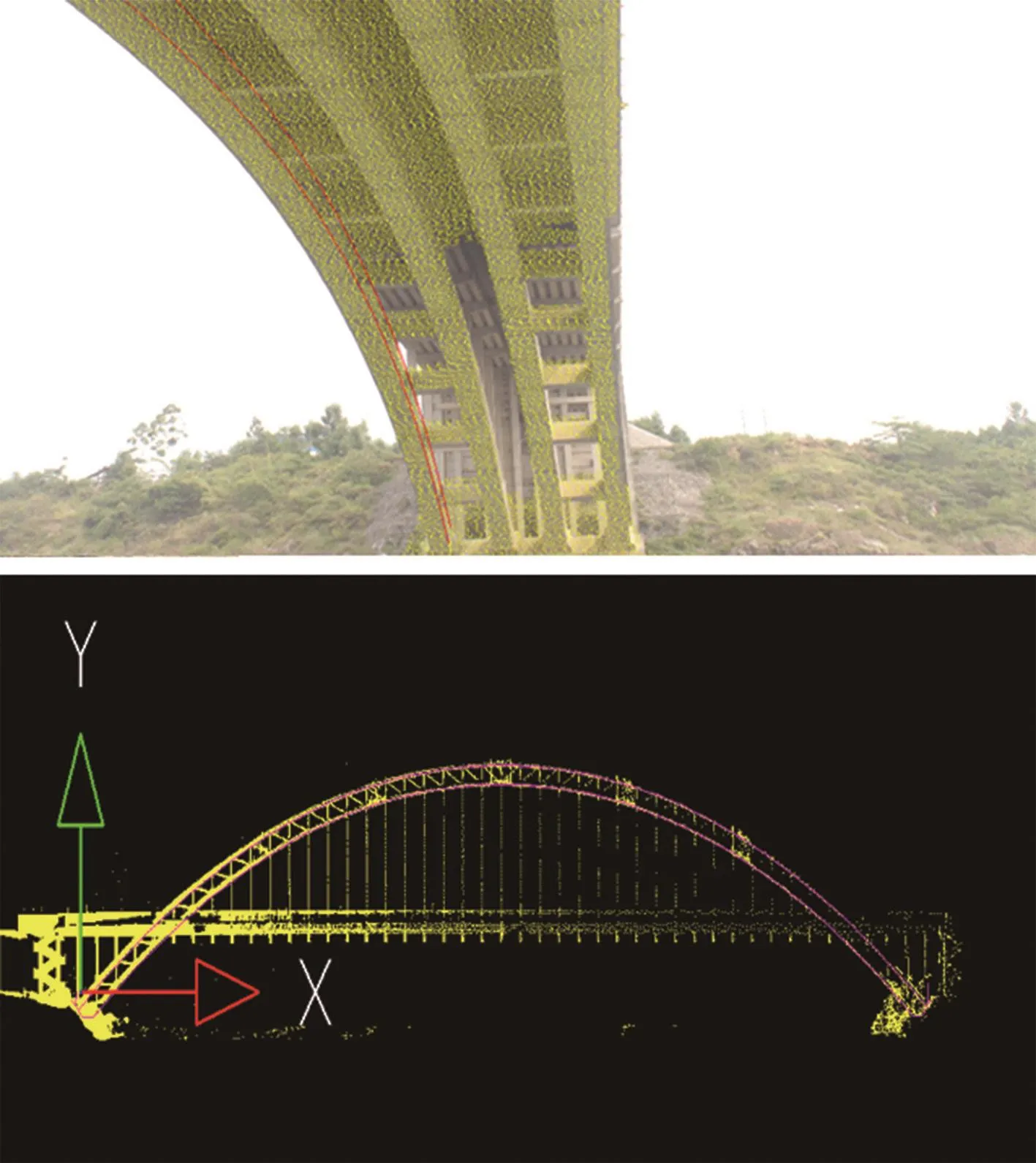
>>图4 桥拱线型
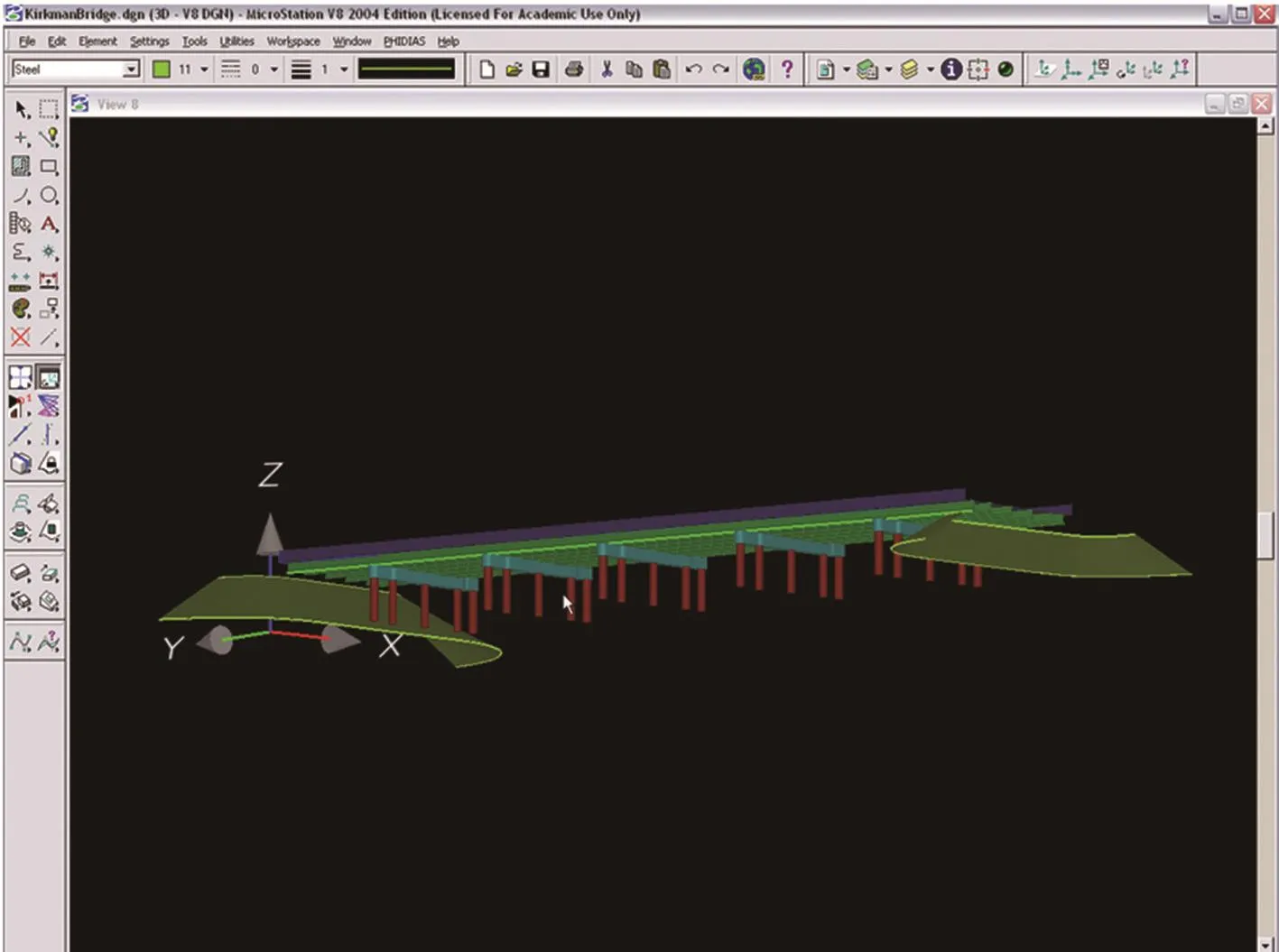
>>图5 桥梁三维模型
创新.协作
水利水电工程是一项巨大的工程,包括前期勘探、测绘、设计、施工等阶段,对于测绘专业来说,其主要任务是提供场地的地形地貌情况供后续设计等单位使用。传统的测绘无外乎全站仪、水准仪、GPS等单点位采集处理方法,对于一些常规区域的测绘,这种作业模式是完全可行的。但是在一些要求比较高的地方,如施工枢纽区、进出水口等地方就稍显吃力,毕竟这些枢纽区域要求的精度更高、更细。而且随着三维设计要求的提出,测绘单位今后提供的测绘产品不再是以往的二维线画图,还必须提供区域内三维地表模型,这就要求相关人员必须采用更新、更好的手段来改进作业方式,提高工作效率,满足上游专业的要求。
在某水电站前期勘探过程中,利用RIEGL LMS-Z420i地面三维激光扫描仪对坝址枢纽区进行了全景扫描,采集了第一手的坝址区点云数据。由于每个设站采集到的点云范围是有限的,对大场景区域来说,多站数据的拼接也是一个研究的热点。现在比较流行的是ICP(Iterative Closest Point)迭代最近点算法,该算法采用点集对点集的迭代方法,可以拟合出相应的曲面。RIEGL的处理软件中也对其进行了补充,即使用4对以上同名点的相关联就可以将相邻两个设站的点云数据进行拼接,同时提供拼接误差以供分析。在采集到的数以亿计的点云中,有工作人员需要的地表点,也有很多噪音点和植被点,这些点对后续建模都是没有用的,必须加以删除。对飞离于地表面的离散噪音点,一般通过手工删除就可以了,但是对植被点就需要通过一定的算法处理才能消除。现有的植被剔除方法基本上都是迭代删除法,其基本原理是在主体点云表面建立一个初始模型,利用点云与模型间的距离差值与设定好的阈值进行比较,如果差值大于给定的阈值,则将该点判定为植被点并进行删除;否则就将该点视为地表点加以保留。通过逐步减小设定的阈值可以将地表面植被逐步删除干净。
经预处理在得到完整的坝址区地表点云之后就可以导入Micro station经三角网构建该区域的表面模型,并通过纹理映射将采集到的影像粘贴到模型表面得到纹理模型。该模型的基础仍然是三角网模型,但是添加了影像信息,效果更加直观。
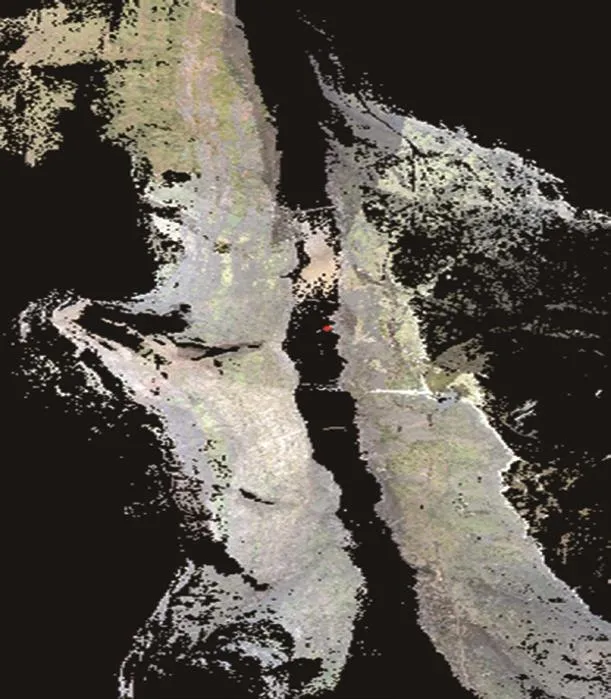
>>图6 某水电站坝址区彩色点云模型
在后续的水利水电施工过程中,激光扫描仪也大有可为,例如:隧洞开挖检测、滑坡体变形监测等,都可以利用激光扫描仪对其进行处理分析。
通过上述几个工程实例可以看出:以地面三维激光扫描仪采集目标物表面三维点云数据为基础,充分利用激光点云的三维坐标属性进行相关计算分析才是激光扫描点云应用的精髓。我们可以直接利用点云坐标进行基于数值的相关分析;也可以利用点云构建目标物三维模型,这样的话,后续分析处理的平台也由点转为了面、体模型。这样的数据加工可以扩大点云数据应用的范畴,后续分析的手段也得到相应的增加,产品形式也会更加丰富,相比于常规测量方法,激光扫描作业模式更经济、更高效、具有更高的作业安全系数。
在LIDAR领域,“点云提供精度、影像提供解析力”,在点云的基础上加上相关影像,产品形式会更多样化,比如正射影像、纹理模型等。这些数据的基础仍然是点云、影像、DEM等,但在成果可视化效果上会更直观、更有力。
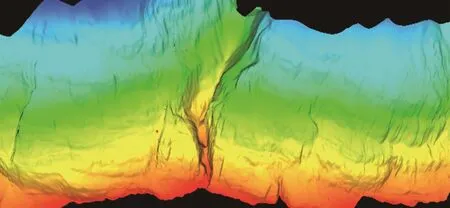
>>图7 经MicroStation三角化的坝址区DEM

>>图8 坝址区纹理模型