一种典型步进电机驱动器的设计
2014-09-03郗海燕
郗海燕
(中国电子科技集团公司 第39研究所,陕西 西安 710065)
一种典型步进电机驱动器的设计
郗海燕
(中国电子科技集团公司 第39研究所,陕西 西安 710065)
步进电机是将电脉冲信号转变为角位移的开环控制元件,步进电机的驱动需要配置专用驱动器,A3977是Allegro公司推出具有双极性、可细分用于两相式步进电机驱动的专用集成芯片。本文详细介绍了应用A3977芯片实现步进电机驱动器的设计方法及设计注意事项,并给出实际工程试验的实测结果。该步进电机驱动器具有控制简单、结构紧凑、低成本、定位精度高、低功耗等特点。
步进电机;步进电机驱动器;细分;A3977
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件,由于步进电机的步距不受电压波动和负载变化的影响,也不受环境条件的限制,而只与脉冲频率成正比。它能够按照控制脉冲数的要求,立即起动、停止、反转,在不丢步的情况下运行时,角位移的误差不会长期积累,所以,步进电机在速度、位置等控制领域中的应用愈来愈广泛[1]。步进电机属于DC驱动的同步电机,但无法直接用DC电源来驱动,需要配置专用的驱动器才能使用[2]。
1 步进电机的驱动设计思想
随着微步进电机应用的日益广泛,其驱动电路的发展也相当迅速,各类控制芯片的功能越来越丰富,操作也越来越简便。A3977是Allegro公司推出的一体化集成驱动电路,A3977是双极性、可细分、用于两相式步进电机驱动的专用集成芯片,电流输出2.5 A,最大输出功率可接近90 W。其主要功能包括:步进细分控制、方向控制、速度控制、电流控制、睡眠控制及功率放大。图1为A3977的逻辑框图[5]。
由于采用了内置译码器技术,A3977可以很容易的使用最少的控制线对步进电机实施微步进控制。其最简单的步进输入只需“STEP”(步进)和“DIR”(方向)2条输入线。通过“STEP”脚简单的输入1个脉冲就可以使电机完成1次步进,省去了相序表,高频控制线及复杂的编程接口。这使其更适于应用在没有复杂的微处理器或微处理器负担过重的场合。同时A3977的内部电路可以自动地控制其PWM操作工作在快、慢及混合衰减模式。这不但降低了电机工作时产生的噪声,也同时省去了一些额外的控制线。
其内部低输出阻抗的N沟道功率DMOS输出结构,可以使其输出达到2.5 A,35 V。这一结构的另一优点是,使它能完成同步整流功能。由于有同步整流流功能,既降低了系统的功耗,又可以在应用时省去外加的肖特基二极管。
A3977的休眠功能可以使系统不工作时的功耗达到最低。休眠时芯片的大部分内部电路,如输出DMOS、比较器及电荷泵等都将停止工作。从而在休眠模式时,包括电机驱动电流在内的总电流消耗在40 μA以内。此外,内部保护电路还有利用磁滞实现的热停车、低压关断及换流保护等功能。
2 某驱动系统设计应用
某低轮廓车载卫星通信天线要求对天线阵的通信板实现准确的俯仰同步定位控制。通信板包括3个接收板和一个发射板。天线阵的通信板具有轻负载、结构紧凑、空间狭小等特点。驱动电机选用一种结构体积小的高性能两相混合式步进电机。针对这一工程需求特点,采用微步进驱动芯片A3977 结合ARM嵌入式微控制器设计了一款多通道智能型的步进电机驱动器。该驱动器主要功能为:接收控制器的控制速度指令控制步进电机运行;向控制器发送各电机运行状态;对电机的运行状态进行监控及保护。图2为驱动器的硬件构成框图。
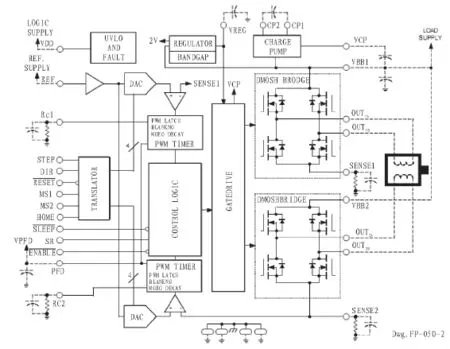
图1 A3977逻辑框图Fig.1 A3977 logic diagram Of A3977
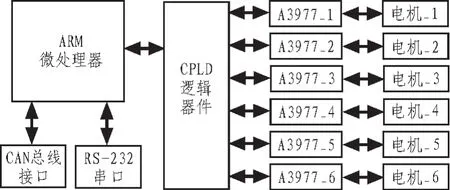
图2 驱动器硬件构成框图Fig.2 Hardware composition of stepper motor driver
结合上述硬件设计配以完善的软件设计就可以完成驱动器的完整设计,软件设计包括两部分;ARM微处理器应用软件及CPLD逻辑器件硬件语言设计。
驱动器硬件设计中的注意事项:
1)A3977芯片PFD、VBB引入端应加入相对应的去耦电容(越靠近芯片越好);
2)PCB印制板布线应布较厚的地层,最好在A3977芯片周围布上星行地,同时设计印刷电路板时应考虑器件的散热设计。
3)为保证输出电流取样的精确,电流的取样电阻有单独地,并将其连到器件周围的星形地上,而且引线越短越好。
4)根据负载电机参数,设计相匹配的LC电流滤波器。
3 工程应用及试验结果
在某低轮廓车载卫星通信天线的天线控制系统通信板的俯仰驱动控制中采用了上述设计的多通道智能型的步进电机驱动器。步进电机选用一种结构体积小的高性能两相混合式步进电机,型号:35BYG250B,电流:0.5 A 。俯仰的角度测量省略了测速传感器及位置角度传感器,利用了步进电机在不丢步的情况下运行时,依照输入的脉冲数作固定角度的转动进而得到灵活的角度控制(位置控制),并可得到与该脉冲信号频率成正比例的转动速度。该步进电机驱动器在工程应用中运行良好可靠、俯仰位置测量与定位精度高。
图3和图4 为用示波器测试电机绕组的电压及电流测试图。
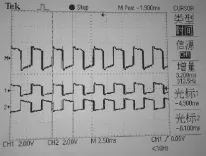
图3 电机绕组的电压测试图Fig.3 Measured voltage curves of machine winding
测试条件为:电机转速 900 rpm 细分控制 1/4步
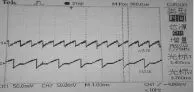
图4 电机绕组的电流测试图Fig.4 Measured voltage curves of machine winding
4 结束语
应用内置译码器步进电机微步进驱动芯片A3977设计的步进电机驱动器在工程已经得到成功应用。应用试验结果表明采用上述设计方法设计的驱动器驱动两相混合式步进电机在要求低速、低功率、结构紧凑、成本低、定位精度高的应用场合值得推广应用。
[1] 顾绳谷.电机及拖动基础[M].北京:机械工业出版社,1981 .
[2] 坂本正文(日).步进电机应用技术[M].王自强,译.北京:科学出版社,2010.
[3] 王彦.基于FPGA的工程设计与应用[M].西安:西安电子科技大学出版社,2007.
[4] 周立功.ARM嵌入式系统基础教程[M].北京:北京航空航天大学出版社,2006.
[5] Allegro Microsystem,LL.A3977-Datasheet .ashx.[EB/OL].(2013-04-23)[2013-05-12].http://www.allegromicro.com/~/media/Files/Datasheets/A3977-Datasheet.ashx.
[6] 史敬灼.步进电动机伺服控制技术[M].北京:科学出版社,2006.
Design of a typical stepper motor driver
XI Hai-yan
(The 39th Institute,Electronic Science and Technology Group Corporation of China,Xi'an 710065,China)
The stepper motor is a open-loop control component ,which transforms the electrical-pulse signal to the angle displacement.A3977 is designed to operate bipolar stepper motor infull-,half-,quarter-,eighth-step modes by Allegro company.The design of the bipolar stepper motor driver is presented in detail in this paper ,and the measured results in a certain application are also given.This typical steeper motor driver is easily controlled ,lowly costed,precisely positioned and lowly consumed.
stepper motor;stepper motor driver;fractionize;A3977
TN721.5
A
1674-6236(2014)11-0065-02
2013-09-16 稿件编号:201309123
郗海燕(1968—),女,陕西蓝田人,高级工程师。研究方向:伺服系统控制与微电子技术应用。
