喷涂机器人管路改造探析
2014-09-01吴国雄
吴国雄 颜 超
(广东省技师学院,广东 惠州 516100)
喷涂机器人管路改造探析
吴国雄 颜 超
(广东省技师学院,广东 惠州 516100)
介绍了汽车前后保险杠清漆自动喷涂机器人基本管路的构成,对该设备气路和液路经常出现的爆管现象进行了研究,并通过增加增压缸、改为双阀控制、对管路压力进行检测等手段来加强对爆管现象的控制。
喷涂机器人;管路;爆管;改造
0 引言
喷涂机器人使用在涂装车间和树脂车间,有复杂的气路和液压管路系统,投运时间较长后容易老化,出现爆管现象,而管路系统没有预警画面,对设备进行维修较困难,造成机器人故障停机时间长。
1 喷涂机器人基本管路
喷涂机器人又叫喷漆机器人(Spray Painting Robot),是可进行自动喷漆或喷涂其他涂料的工业机器人,广泛用于汽车、仪表、电器、搪瓷等工艺生产部门。机器人的基本管路由气路和液路组成,包括总管路控制柜、控制气路和液路切换的机器人保压盒电磁阀、机器人雾化器混合管路[1]。
1.1 保压盒空气管路
空气保压管路为机器人气动管路的气源,与机器人XRC电气控制系统连用,机器人上电前必须打开,对机器人起保护作用。
1.2 雾化器混合管路
输入电压升高时,空气供给控制阀ON,排放控制阀OFF,先导空气进入先导室;先导室压力升高,作用在隔膜上,供气阀打开,部分空气排入出口管道。出口压力通过传感器反馈给控制回路,控制回路通过压力比较控制供给阀和排放阀动作,以使出口压力达到设定值。
2 爆管原因
2.1 齿轮泵有固化剂卡阻
固化剂泵是用于输送固化剂(苯磺酸)的一种机械隔膜式计量泵,流量可以在0~100 L/h内无级调节,通过泵头上的单向阀启闭作用完成吸排目的,用来输送液体(特别是腐蚀性液体),是一种特殊容积泵。由于固化反应属于化学反应,受固化温度影响很大,温度增高,反应速度加快,凝胶时间变短,凝胶时间的对数值随固化温度上升大体呈直线下降趋势,容易造成齿轮泵有固化剂卡阻(图1)。
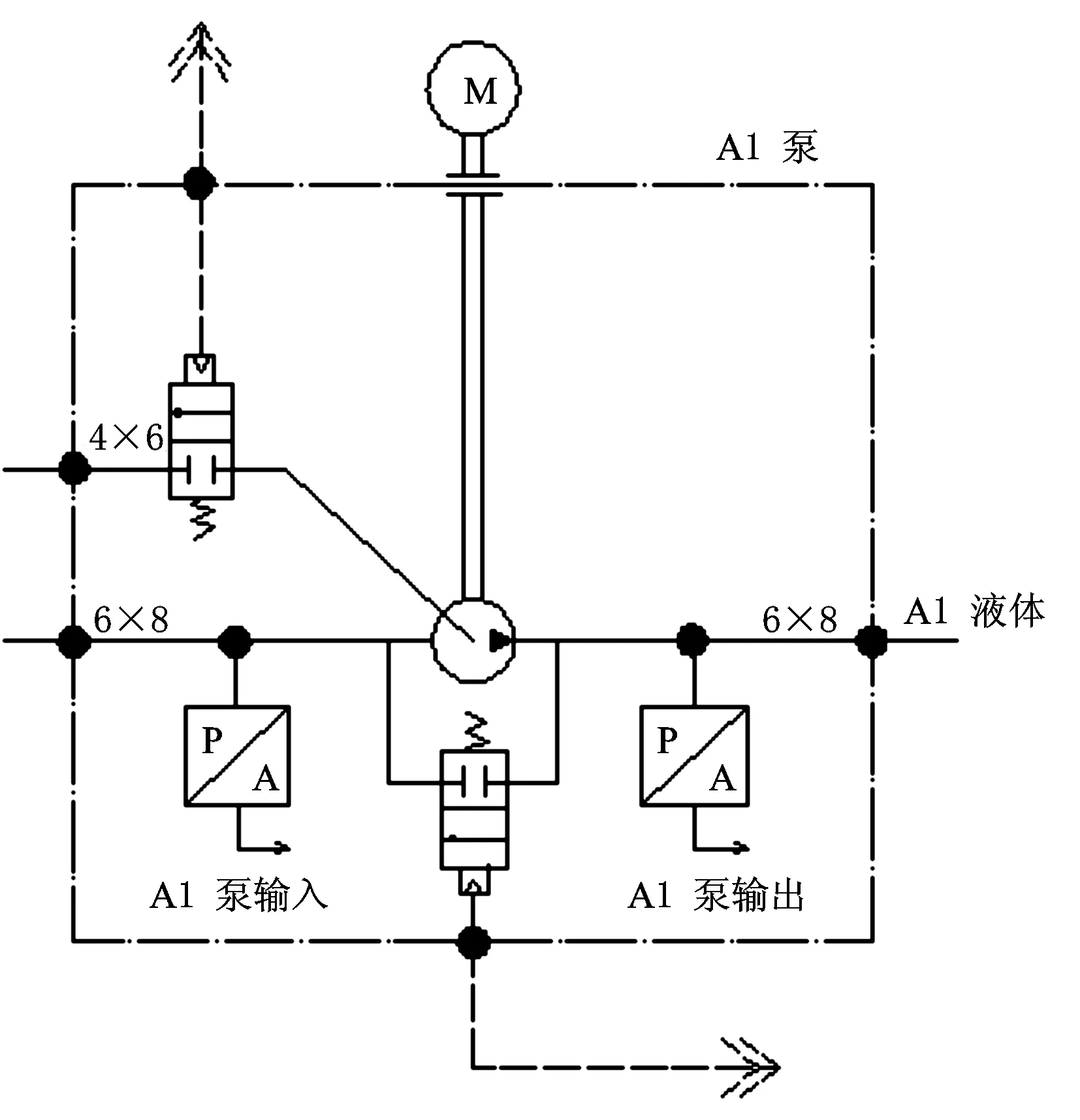
图1 齿轮泵有固化剂卡阻
2.2 双组份混合器卡阻
喷涂机器人的漆料通常是双组份漆,双组份涂料由涂料以及固化剂组成(固化剂能加速涂料成膜的速度),利用双组份混合器对漆料及固化剂进行调配,且调配完后必须短时间内使用,否则就会失效,容易造成双组份混合器的卡阻(图2)。

图2 双组份混合器卡阻
2.3 雾化器卡阻
空气压缩式雾化器借助于压力或离心力使压缩空气通过细小管口形成高速气流,产生的负压带动液体或其他流体分散成均匀而微细的雾滴,在高速撞击下向周围飞溅,使液滴变成雾状微粒从出气管喷出,并施涂于被涂物的表面。涂料的不洁净及停机长时间不使用,容易造成雾化器卡阻。
3 管路改造
3.1 增加增压缸
涂料阀出现卡阻,阀芯无法正常动作,管内气压不足,涂料压力增大,管路出现裂痕,进而出现爆管现象,更换涂料管困难,更换时间较长,维修时间延长,更换阀的备件次数较多,造成维修费用增加。
对设备增加增压缸,使压缩空气的压力增加到>0.7 MPa,使涂料阀能够正常工作,阀工作正常后,涂料管路基本稳定,爆管发生率降低。
3.2 改为双阀控制
由于执行机构进出是通过一根阀芯进行控制,单独控制执行机构两侧压力是不可能的。因此,背压作用于执行机构运动的反方向。随着背压升高,为保证执行机构
的运动,必须提高压力,而负载的变化会造成系统稳定性差。
可增加额外的液压元件,如调速阀、压力控制阀等,通过增加阻尼,提高系统速度刚度来提高稳定性,但增加元件会降低效率,浪费能源,还会使得整个系统的可靠性降低、成本增加。
采用双阀双路控制,从控制阀组引出两条涂料管路,增加备用电气切换控制线路,单阀出现卡阻可以自动关闭,切换到备用阀上,增加了阀的动作可靠性。
3.3 对管路压力进行检测
齿轮泵的压力只能进行调节,而实际生产中容易出现负载不稳定的现象,造成无法准确控制系统最佳压力,使得整个系统可靠性降低。
在齿轮泵进出口增加压力传感器检测管路压力[2],并运用PLC对信号进行处理,利用人机界面对压力值进行设定并实时显示当前压力,增加报警灯提示[3]。当实时控制涂料管的压力大于设定最大值时,齿轮泵停止工作,机器人报高压力警报,当实时控制涂料管的压力小于设定最小值时,齿轮泵停止工作,机器人报低压力警报;直到处理涂料压力控制在正常工作范围内,机器人报警解除,恢复正常工作[4]。
4 结语
通过增加增压缸增大压缩空气压力,利用双阀双路控制,优化计量泵启动与阀开闭时序,提高阀的动作可靠性,在齿轮泵进出口增加压力传感器检测管路压力,增加压力报警值设定,避免管路压力不稳,大大减少了爆管现象的发生,提高了效益。
[1]安川电机(中国)有限公司.喷涂机器人管路说明书[Z],2010
[2]党安明,张钦军.传感器与检测技术[M].北京大学出版社,2011
[3]人力资源和社会保障部教材办公室.电气控制线路安装与检修[M].中国劳动和社会保障出版社,2010
[4]安川电机(中国)有限公司.机器人使用说明书[Z],2010
2014-06-23
吴国雄(1984—),男,广东梅州人,助理讲师,研究方向:机电一体化。
