六自由度装配机械手设计及运动学求解
2014-08-29刘志虎林鹏雄
王 雷,刘志虎,李 震,林鹏雄
(1.安徽工程大学先进数控和伺服驱动技术安徽省重点实验室,安徽芜湖 241000;2.安徽工程大学机械与汽车工程学院,安徽芜湖 241000;3.牧田(中国)有限公司,江苏昆山 215300)
六自由度装配机械手设计及运动学求解
王 雷1,2,刘志虎1,2,李 震1,林鹏雄3
(1.安徽工程大学先进数控和伺服驱动技术安徽省重点实验室,安徽芜湖 241000;2.安徽工程大学机械与汽车工程学院,安徽芜湖 241000;3.牧田(中国)有限公司,江苏昆山 215300)
结合对自动化装配线的应用对象,选定了机械手所要实现的功能。首先,给出了装配机械手的总体方案,总体方案包括机械手本体组成和自由度的分配。确定了机械手各杆臂长度以及各关节的转角范围。其次,对六自由度机械手具体结构进行了建模、虚拟装配,并对部分关键零件进行强度校核。然后,建立了六自由度机械手的运动模型,利用D-H参数法建立了运动模型的各个关节的坐标,并确定各关节的D-H参数,利用Matlab软件对机械手的运动学正解、逆解进行了计算与验算,结果表明了所建立模型的正确性与合理性。其设计理念对以后关节型工业机械手的设计有一定的参考和应用价值。
六自由度装配机械手;建模;虚拟装配;运动学建模
机器人(机械手)是集机械、控制、电子、传感器、计算机、人工智能等多学科先进技术于一体的现代制造业重要的自动化装备[1]。机器人的诞生能够提高生产率以及改善工作环境。因此对机械手的研究意义重大。国内外许多学者已对机械手建模、优化设计、控制、运动学及动力学仿真等方面做了大量的研究工作[2-16]。其中,刘淑英等针对五自由度机械手,基于Lagrange方程建立了五自由度机械手的动力学模型,通过UG建立实体仿真模型,利用UG与ADAMS良好的接口直接导入ADAMS建立了虚拟样机,并且进行了动力学仿真,得出了各关节转角和关节力矩的关系曲线,分析了末端机械手速度对各关节力矩、角速度和角加速度的影响,这对提高机械手的设计性能、减少研发时间提供了帮助,并为机械手的控制分析打下了基础[2]。张明辉等对并联机械手动力学仿真进行了研究并通过运动学和动力学仿真模型,为进一步对机械手的设计与分析奠定了基础[3]。文献[4]对六自由度并联机器人运动学设计与解耦方面进行了研究。YOU等对机器人的动态和控制性能进行了优化设计,优化结果表明了所设计的结构的合理性[5]。本文的研究正是基于某企业自动化装配线对机器人的功能需求而开展的,首先对装配机械手的总体结构进行了设计,包括机械手本体组成和自由度的分配。然后对各个部分进行了三维建模及虚拟装配,并对部分关键零件进行强度校核。最后,建立了六自由度机械手的运动模型,利用D-H参数法建立了运动模型的各个关节的坐标,并确定各关节的D-H参数,利用Matlab对机械手的运动学正解、逆解进行了计算与验算,结果表明了所建立模型的正确性与合理性,为下一步研究机械手的智能控制提供了设计参数。
1 六自由度装配机械手机械本体的总体设计方案
1.1应用背景
根据某企业的需求,本文设计的机械手所要做的工作是完成箱体表面上6个螺母的装配,6个螺母的位置如图1所示。

图1 装配部件示意图Fig.1 Diagram of assembling components

图2 装配机械手结构简图Fig.2 Structure diagram of the assembly manipulator
装配机械手工作的内容为从螺母源处取6个螺母,然后按1—2—3—4—5—6的顺序装配螺母,最后回到螺母源处再取6个螺母,进行下次装配,如此循环。
根据装配机械手的工作内容要求,其整体性能应达到如下的主要技术指标:
1)关节转速<4 r/min;2)工作负载>1 kg;3)末端重复定位精度<0.5 mm;4)自由度数目为6。
1.2装配机械手的总体构成
本文所设计的装配机械手是六自由度机械手,由底座、腰部、大臂、小臂、手腕部和螺母枪组成,其中腰部、大臂和小臂统称为臂部。
机器手的一个自由度对应一个关节,所以本文设计的机械手对应6个关节,其结构简图如图2所示。其中,关节1,2,3用来确定机械手末端的位置,即定位机构;关节4,5,6用来确定机械手末端的姿态,即定向机构。
1.3基于D-H参数法的装配机械手连杆参数的确定

图3 装配机械手连杆的D-H参数Fig.3 Linkage D-H parameters of the assembly manipulator
在装配机械手的本体设计中,一个很重要的问题就是如何确定装配机械手的连杆参数[17],包括机械手连杆长度ai、连杆扭角αi、连杆距离di和连杆转角θi。其中,连杆长度ai为两关节轴线之间的距离,即zi轴与zi-1轴的公垂线长度,沿xi轴方向测量。ai总为正值,当两关节轴线平行时,ai=li,li为连杆的长度;当两关节轴线垂直时,ai=0。连杆扭角αi为两关节轴线之间的夹角,即zi轴与zi-1轴之间的夹角,绕xi轴从zi-1轴旋转到zi轴,符合右手规则时为正。当两关节轴线平行时,αi=0;当两关节轴线垂直时,αi=90°。连杆距离di为两连杆ai与ai-1之间的距离,即xi轴与xi-1轴之间的距离,在zi-1轴上测量。对于转动关节,di为常数;对于移动关节,di为变量。连杆转角θi为两连杆ai与ai-1之间的夹角,即xi轴与xi-1轴之间的夹角,绕zi-1轴从xi-1轴旋转到xi轴,符合右手规则时为正。对于转动关节,θi为变量,对于移动关节,θi为常数。机械手的每根连杆的几何尺寸都可以用这4个参数来描述,其中参数ai和αi用于描述连杆自身的几何特征,其数值的大小是由zi-1轴和zi轴之间的距离和夹角确定的;参数di和θi用于描述连杆之间的连接关系,其数值的大小是由xi-1轴和xi轴之间的距离和夹角确定的[18-19]。
利用D-H参数法,结合装配机械手的工作内容,各参数如图3和表1所示。其中连杆转角θi的取值范围如表2所示。

表1 装配机械手连杆的D-H参数Tab.1 Linkage D-H parameters of the assembly manipulator

表2 连杆转角θi的取值范围Tab.2 Range of each linkage angle θi (°)

图4 装配机械手的总体外形Fig.4 Overall shape of the assembly manipulator
1-底座;2-腰部;3-大臂;4-小臂;5-腕部一;6-腕部二;7-腕部三;8-螺母枪
2 装配机械手的三维建模
2.1装配机械手总体外形设计
根据装配机械手各关节的布置方案及臂杆的长度要求,设计的装配机械手的总体外形如图4所示。
2.2装配机械手结构设计
确定装配机械手总体外形后,开始进行各部件的具体结构设计。具体结构的设计要考虑到传动件的定位、零件之间的空间位置等因素,同时还要考虑到装配和加工工艺的可行性。基于以上的功能要求,对各个部分进行结构设计与建模。
2.2.1 底座结构设计
底座是整个机械手与地面直接连接的部件,是控制整体机械手位置的部件。底座中有关节1的各传动件,如轴承、蜗轮、蜗杆、底座主轴等,其结构设计与建模如图5所示。
2.2.2 腰部结构设计
腰部体中有关节2的各传动件,如轴承、主轴等,如图6所示。腰轴与腰部体之间的连接采用了2个背对背装配的圆锥滚子轴承,其外圈固定在腰部体的孔内,并由沉孔限制外圈的轴向移动,内圈可以通过调整2个正反锁紧螺母来压紧。这样不仅能够起到压紧轴承内圈的作用,同样能够起到防松作用,其压紧和防松作用比传统的方法快捷、方便。腰轴采用空心轴,这有利于腰部的散热。腰部的各主要零件之间均采用定位销来提高腰部的装配精度。

图5 底座结构设计Fig.5 Base structure design
1-底盘;2-蜗杆;3-底座旁盖;4-轴接;5-底座主轴;6-双列圆柱滚子轴承;7-蜗轮;8-推力球轴承;9-底座箱体;10-圆柱滚子轴承

图6 腰部结构设计Fig.6 Waist design
1-腰部体;2-大臂;3-腰轴;4-圆锥滚子轴承;5-正反锁紧螺母;6-腰盖
2.2.3 大臂结构设计
大臂是腰部和肩部之间的连接杆,所谓的肩部是指大臂和小臂之间的连接关节。大臂与腰轴之间的连接要考虑到轴向、周向以及径向的定位。因此,基于以上考虑,设计出来的大臂结果如图7所示。大臂与腰轴之间的紧定采用了6个螺母。大臂与肩部主轴之间的连接和大臂与腰轴之间的连接采用相同的方法。

图7 大臂结构设计Fig.7 Arm design
2.2.4 小臂结构设计

图8 小臂结构设计Fig.8 Forearm design
1-大臂;2-肩体;3-肩体下盖;4-小臂体;5-小臂轴1;6-小臂轴2;7-小臂轴3
在小臂结构设计之前,首先要考虑的是腕部3个自由度驱动源的位置及其传动原理。在本设计中,腕部的3个自由度都是靠电机来驱动,3个电机都分布在肩部上方即小臂的后端位置。腕部3个自由度靠3根轴来传递驱动力,其3根轴都为逐一嵌套的空心轴。其结构设计与建模如图8所示。
2.2.5 腕部结构设计
为了使腕部外形左右对称以及合理利用有限的空间,将腕部一和腕部三的传动系统分布在左侧,腕部二的传动系统分布在右侧。腕部的传动系统均采用圆柱直齿轮和圆锥直齿轮传动。如图9所示。
图9 腕部结构设计Fig.9 Wrist design
1-腕部一;2-腕部二;3-腕部三
另外,对关键零部件进行了校核,包括直齿锥齿轮的齿面接触疲劳强度、齿根弯曲疲劳强度、圆柱蜗杆传动的齿面接触疲劳强度、蜗轮齿根弯曲疲劳强度、蜗杆的刚度等都满足强度或刚度的要求。
最终建立六自由度装配机械的三维装配模型如图10所示。

图10 六自由度装配机械手的三维装配模型Fig.10 3D assembly model of 6-DOF assembly manipulator
3 装配机械手的运动学模型及其求解
运动学分析是机器人动力学、轨迹规划和位置控制的重要基础。机器人手臂运动学研究的是手臂各连杆间的位移关系、速度关系和加速度关系,本节只讨论位移关系。机器人手臂可以看作为一个开式运动链,它是由一系列连杆通过转动或移动关节串联而成的。开链的一端固定在底盘上,另一端是自由的,安装着手爪(或称末端执行器),用以操作物体,完成各种作业。关节由驱动器驱动,关节的相对运动导致连杆的运动,使手爪到达所需的位姿。
运动学包括正运动学和逆运动学。正运动学是已知各关节的角度来确定末端执行器的位置和姿态;而逆运动学是由末端执行器的位置和姿态来反求达到此位姿的各关节的角度。机械手是由一系列连杆通过关节连接而成,因此需要一种描述连杆位移、速度、加速度以及动力学问题的行之有效的数学方法[18]。为了研究操作臂各连杆之间的位移、速度、加速度关系,对其进行运动学的分析,本文采用D-H参数的方法,在每个连杆上固定一个坐标系,用4×4的齐次变换矩阵描述2个杆件的空间关系(位置和姿态),从而推导出机械手末端坐标系相对于参考系的等价齐次变换矩阵。
3.1连杆坐标系之间的坐标变换
从坐标系{Qi-1}到坐标系{Qi}之间的坐标变换,可由坐标系{Qi-1}经过下述变换顺序来实现[17]:
1)绕zi-1轴旋转θi角,使xi-1轴与xi轴同向;
2)沿zi-1轴平移距离di,使xi-1轴与xi轴在同一条直线上;
3)沿xi轴平移距离ai,使坐标系{Oi-1}的坐标原点与到坐标系{Oi}的坐标原点重合;
4)绕xi轴旋转αi角,使zi-1轴与zi轴在同一条直线上。
上述变换每次都是相对于动坐标系进行的,所以经过4次变换的齐次变换矩阵为
Ti=Rot(z,θi)Trans(0,0,di)Trans(ai,0,0)Rot(x,αi),
即:
(1)
式中的ai,αi,di,θi定义与前文相同,在此不再赘述。
由式(1)和表1可得各相邻连杆的变换矩阵为
将以上各个连杆变换矩阵相乘,得到机械手的变换矩阵0T6为
(2)
式中:

其中:si=sinθi,ci=cosθi(下文表示方法与此处相同),如s1=sinθ1,c1=cosθ1。
3.2装配机械手运动学的正解
运动学正解是指在给定各杆的结构参数的情况下,根据各关节的运动量,计算出机械手末端执行器的位置和姿态[20]。
为验证所得的变换矩阵0T6的正确性,取机械手的某一特殊位置时的θi值代入式(2)中,如图11所示,求出的计算结果与机械手末端所处的状态相比较。
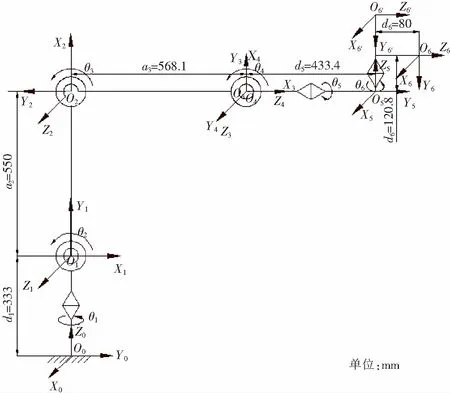
图11 装配机械手的特殊状态Fig.11 Special state of the assembling manipulator
由图11可以得出此机械手齐次矩阵中的D-H参数,如表3所示。
从图11可以得到机械手的末端状态为
将表3的相关参数代入式(2)中得:

可以看出,计算的结果与机械手所处的末端状态完全一致。可见,式(2)是正确的。
3.3装配机械手运动学的逆解
机器人正运动学的逆过程是逆运动学,即已知机器人在三维空间的末端位姿矩阵,求对应的关节变量[20]。在机器人控制中,只有使各关节移动或转动逆解中的值,才能使末端执行器达到工作所要求的位置和姿态,所以运动学逆解是机器人控制的关键环节之一。

表3 装配机械手特殊状态时连杆的D-H参数Tab.3 Lingage D-H parameters of assembling manipulator in a particular status

于是有:
(3)
将式(3)中的左右两边展开,且令左、右两边的第3行元素对应相等,可得:
(4)
解方程式(4)可得:
其次,将式(3)中的左右两边展开,且令左、右两边的(2,2)元素相等,可得:
-sinθ5sin(θ2+θ3+θ4)=oz,
解得:

(5)
令:
φ=θ2+θ3+θ4,
(6)
(7)
将式(7)左右两边展开,且令左右两边的(2,1)元素相等,可得:
-nxsinθ2cosθ1-nysinθ1sinθ2+nzcosθ2=cosθ5cosθ6sin(θ3+θ4)-sinθ6cos(θ3+θ4),
(8)
由式(6)得:
θ3+θ4=φ-θ2,
(9)
将式(9)代入式(8)并整理得:

(10)
(11)
将式(11)左右两边展开,且令左右两边的(2,2)元素相等,可得:
-sinθ5sin(φ-θ2-θ3)=-sinθ3(oxcosθ1cosθ2+oysinθ1cosθ2+ozsinθ2)+
cosθ3(-oxsinθ2cosθ1-oysinθ1sinθ2+ozcosθ2),
(12)
由式(6)得:
θ4=φ-θ2-θ3,
(13)
将式(13)代入式(12)中并整理得:

(14)
整理并按求解顺序得θ1,θ5,θ6,φ,θ2,θ3,θ4,如式(15)所示。
(15)
仿真模型中,在螺母源和装配6个螺母对应的机械手末端的位姿矩阵分别为
将位姿矩阵各参数代入式(15)中得到各关节转角如表4所示。

表4 各关节转角Tab.4 Each joint angle (°)
4 结 论
1)根据应用对象,对六自由度装配机械手机械本体的总体方案进行了设计;
2)利用D-H参数法确定装配机械手连杆参数;
3)建立了装配机械手三维模型,包括底座结构设计与建模、腰部结构设计与建模、大臂结构设计与建模、小臂结构设计与建模、腕部结构设计与建模,并对关键零部件的强度进行了校核;
4)利用Matlab对六自由度装配机械手的D-H运动学模型进行求解,得出正解与逆解运动学方程,为下一步研究机械手的智能控制提供了设计参数。
/
[1] 黄金风.MSRS和ODE环境下POWERCUBE模块化机械手的仿真研究[D].大连:大连交通大学,2010. HUANG Jinfeng.Simulation Study for POWERCUBE Modular Manipulator in MSRS and ODE Environment [D].Dalian: Dalian Jiaotong University,2010.
[2] 刘淑英,张明路,韩慧伶.五自由度机械手动力学分析与仿真[J].河北工业大学学报,2009,38(2):32-36. LIU Shuying,ZHANG Minglu,HAN Huiling.Study and simulation of dynamics of 5-DOF manipulator [J].Journal of Hebei University of Technology,2009,38(2):32-36.
[3] 张明辉,禚宝海.Diamond并联机械手动力学仿真的Simulink实现[J].山东科技大学学报(自然科学版),2010,29(1):90-94. ZHANG Minghui,ZHUO Baohai.Simulink realization for dynamic simulation of Diamond parallel manipulator [J].Journal of Shandong University of Science and Technology (Natural Science),2010,29(1):90-94.
[4] YAN Jin,CHEN Ming,YANG Guilin.Kinematic design of a 6-DOF parallel manupulator with decoupled translation and rotation [J].IEEE Trabsactions on Robotics,2006,22(3):545-551.
[5] YOU Wei,KONG Minxiu,SUN Lining,et al.Optimal design of dynamic and control performance for planar manipulator [J].Journal of Central South University,2012,19(1):108-116.
[6] WU Jun,CHEN Xiaomeng,LI Tiemin,et al.Optimal design of a 2-DOF parallel manipulator with actuation redundancy considering kinematics and natural frequency [J].Robotics and Computer-Integrated Manufacturing,2013,29:80-85.
[7] MENON C,VERTECHY R,MARKOT M C,et al.Geometrical optimiza-tion of parallel mechanisms based on natural frequency evaluation: Application to a spherical mechanism for future space applications[J].IEEE Transactions on Robotics,2009,25(1):12-24.
[8] MULLER A,HUFNAGEL T.Model-based control of redundantly actuated parallel manipulators in redundant coordinates[J].Robotics and Autonomous Systems,2012,60(1):563-571.
[9] YANG Zhiyong,WU Jiang,MEI Jiangping.Motor-mechanism dynamic model based neural network optimized computed torque control of a high speed parallel manipulator [J].Mechatronics,2007,17(7):381-390.
[10] ZHANG Dan,BI Zhuming,LI Beizhi.Design and kinetostatic analysis of a new parallel manipulator [J].Robotics and Computer-Integrated Manufacturing,2009,25:782-791.
[11] ZENG Qiang,EHMANN K F.Design of parallel hybrid-loop manipulators with kinematotropic property and deployability [J].Mechanism and Machine Theory,2014,71(1):1-26.
[12] ZHANG Dan,GAO Zhen,SU Xiaoping,et al.A comparison study of three degree-of-freedom parallel robotic machine tools with/without actuation redundancy [J].International Journal of Computer Integrated Manufacturing,2012,25(1):230-247.
[13] 张付祥,王树国.创伤手指康复机械手嵌入式控制系统[J].河北科技大学学报,2008,29(4): 299-304. ZHANG Fuxiang,WANG Shuguo.Embedded control system of rehabilitation manipulator for injured fingers [J].Journal of Hebei University of Science and Technology,2008,29(4):299-304.
[14] SRIVATSAN R A,BANDYOPADHAY S,GHOSAL A.Analysis of the degrees-of-freedom of spatial parallel manipulators in regular and singular configurations[J].Mechanism and Machine Theory,2013,69:127-141.
[15] SRIVATSAN R A,BANDYOPADHAY S.On the position kinematic analysis of MaPaMan: A reconfigurable three-degrees-of-freedom spatial parallel manipulator[J].Mechanism and Machinetheory,2013,62:150-165.
[16] 孙杏初.关节型机器人主连杆(手臂)参数的优化设计[J].北京航空航天大学学报,1996,22(4):509-512. SUN Xingchu.Optimal design of the majorlink age parameters of articulated robot [J].Journal of Beijing University of Aeronautics and Astronautics,1996,22(4):509-512.
[17] 韩建海.工业机器人[M].武汉:华中科技大学出版社,2012. HAN Jianhai.Industrial Robot [M].Wuhan: Huazhong University of Science and Technology Press,2012.
[18] 臧庆凯.六自由度机械手运动学与运动规划研究[D].柳州:广西工学院,2012. ZANG Qingkai.Research on Kinematics and Motion Planning for Six Degree of Freedom Manipulator[D].Liuzhou: Guangxi University of Science and Technology,2012.
[19] 赵铁石,冯海兵,刘艳辉,等.五自由度宏/微双重驱动并联机构及其运动学分析[J].燕山大学学报,2010,34(6):501-506. ZHAO Tieshi,FENG Haibing,LIU Yanhui,et al.5-DOF dual-drive parallel mechanism and its kinemtics[J].Journal of Yanshan University,2010,34(6):501-506.
[20] 付永领,张桂英,李 军.一种简化的机器人运动学分析方法及其仿真研究 [J].机床与液压,2004(11):70-76. FU Yongling,ZHANG Guiying,LI Jun.A simple kinematics analysis method and its simulation research on a joint robot [J].Machine tool & hydraulics,2004(11):70-76.
[21] 刘松国.六自由度串联机器人运动优化与轨迹跟踪控制研究[D].杭州:浙江大学,2009. LIU Songguo.Research on Motion Planning and Trajectory Tracking Control of Six-DOF Serial Robots [D].Hangzhou: Zhejiang University,2009.
Design and kinematics solution of 6-DOF assembly manipulator
WANG Lei1,2, LIU Zhihu1,2, LI Zhen1, LIN Pengxiong3
(1. Anhui Key Laboratory of Advanced Numerical Control and Servo Technology, Anhui Polytechnic University, Wuhu Anhui 241000, China; 2.School of Mechanical and Automotive Engineering, Anhui Polytechnic University, Wuhu Anhui 241000, China; 3. Makita China Company Limited, Kunshan Jiangsu 215300, China)
The joint based manipulator has
growing attention by designers and users owing to its wider tasking area, flexibility of movement and compact construction features. Considering the application of automatic assembly line, the required functions of manipulator are selected. Firstly, the overall designing scheme of the assembly manipulator is given, and the overall scheme includes the main components of assembly manipulator and allcation degrees of freedom. The jib length of industrial manipulator and the angle rang of each joint are determined. And then, the specific structure of 6-DOF manipulator is designed, modeled and virtually assemblied. Meanwhile, the strength of some key parts is also checked.Finally, the kinematic model of the 6-DOF manipulator is established. Each joint motion model coordinate is established by using D-H parameter, and D-H parameters of each joint are determined. The kinematics normal and inverse solutions of the assembly manipulator are calculated and checked by using Matlab, and the results show that the established model is reasonable and correct. The design philosophy has some reference and application value for designing the joint industrial manipulator.
six degree of freedom assembly manipulator; modeling; virtual assembling; kinematic modeling
2014-06-29;
2014-08-15;责任编辑:张 军
国家自然科学基金(51305001,51175262);安徽省自然科学基金(1208085QE94,1308085ME78);国家级大学生创新创业训练计划项目(201210363139);省级大学生创新创业训练计划项目(AH201310363277)
王 雷(1982-),男,安徽亳州人,副教授,博士,主要从事数字化设计与智能制造方面的研究。
E-mail:wangdalei2000@126.com
1008-1542(2014)05-0417-11
10.7535/hbkd.2014yx05003
TP241.3
A
王 雷,刘志虎,李 震,等.六自由度装配机械手设计及运动学求解[J].河北科技大学学报,2014,35(5):417-427.
WANG Lei,LIU Zhihu,LI Zhen,et al.Design and kinematics solution of 6-DOF assembly manipulator[J].Journal of Hebei University of Science and Technology,2014,35(5):417-427.
