霍尔式磁电里程仪系统设计
2014-08-26齐龙妹李岁劳
齐龙妹,马 戎,李岁劳,周 博
(西北工业大学自动化学院,陕西 西安 710129)
0 引言
里程仪是用于记录车辆行驶里程的传感器,目前已经成熟应用并开发的有机械式里程仪、光电式里程仪和磁电式里程仪。对于机械式里程仪,高速行驶的车辆常常造成钢丝软轴疲劳断裂,从而使里程表功能失效,除此之外,还存在着精度低的缺点[1]。光电式里程仪,虽然车轮转动1周可产生脉冲300个或更多、分辨率高、响应几乎没有滞后现象,测量精度达到了10-3m/s[2],但是安装困难和成本高,使得光电式里程仪的推广受到了限制。磁电式里程仪是纯电子式里程表传感器,与机械部件不直接接触,传感器探头与靶轮之间有一定的间隙,代表了目前汽车市场的主流发展方向[3],具有高可靠性、经济性和技术性等优点。为了满足车辆导航在野外和复杂道路状况下的应用需求,设计了一款低成本、易安装、可靠性高、测量精度可以满足普通车辆导航需求的霍尔式磁电里程仪。
1 霍尔传感器原理与磁路设计
目前,霍尔效应传感器已广泛应用于精密测磁、自动化控制、通信、计算机和航天航空等工业部门及国防领域[4]。霍尔式传感器是利用霍尔效应制作的一种磁电转换元件,分为线性霍尔传感器和开关型霍尔传感器。线性霍尔元件输出的是模拟量,而开关型霍尔元件输出的是数字量。线性霍尔元件的输出电压与磁感应强度成正比,直接或间接引起磁场变化的物理量均可成为其检测的对象,可以感受很小的磁场变化,但是在获取信息的同时也向应用系统引入了干扰或产生零点漂移,通过软硬件算法处理可以把引入的干扰消除。能够将许多非电物理量如力、位移、速度、角度、转数和转速等,转变成电量来进行检测和控制[5]。开关型霍尔传感器的最小检测距离是固定的,考虑到车辆在行驶过程的震动和颠簸会使检测距离变化,适用性不强,所以本里程仪的设计选用线性霍尔器件作为测量元件,通过实时采集与磁场强度成正比的电压信号,经过软件和硬件处理,保证信号的可靠性检测。
霍尔传感器在磁电式里程仪系统中工作原理是:当传感器的旋转机构在外驱动作用下旋转时,会带动永久磁铁旋转,穿过霍尔元件的磁场将产生周期性变化,引起霍尔元件输出电压变化,并通过后续电路处理提取车辆里程信息。
可靠的磁路设计是准确测量里程信息的前提。在设计中将永磁体安装在车辆的轮毂上,以轮毂的安装中心轴为圆心,将磁体均匀安装在汽车的轮毂上(如图1所示),增加安装磁体的安装个数,可以提高里程仪的测量精度。通过实验可以测得,当永磁体同名安装在车辆轮毂上时,若永磁体之间距离15 mm以上,则每个永磁体产生的磁场几乎不受影响,而当永磁体之间的距离相距小于10mm时,每个磁体产生的磁场之间相互作用使得磁体周围的磁感应强度增大。所以,如果磁体之间的距离相距小于10 mm时,选择相邻磁体之间异名安装,这样采用合适的阈值判断方法,可以提高测量精度。同时,当车辆的轮毂材料不同时,对磁体的磁场有影响,通过理论分析和实验验证,当车辆轮毂采用含铁量较高的金属时,会使得磁体产生的磁场加强,也就是金属被永磁体产生的强磁场磁化,同时加强了永磁体产生的磁场强度。当车辆轮毂采用铝合金材料时,因为铝合金是抗磁性物质,对磁路几乎没有影响。
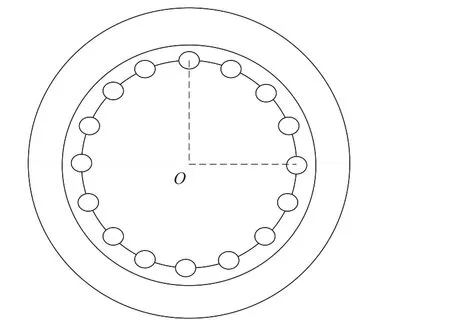
图1 永磁体安装
2 信号调理电路
选择型号为N35的NdFeB永磁材料作为永久磁铁,规格为直径3mm×厚度2mm的圆柱形。选用型号为UGN3503的线性霍尔传感器作为磁场感应元件,UGN3503具有极高的灵敏度,响应速度可达23kHz,工作电压为4.5~6V,低噪声输出。由于周围磁场的变化会使得传感器的静态输出有微小的跳变。为了使得传感器静态输出时不受温度和周围干扰磁场的变化影响,采用差分输入[6],如图2所示。选用两片霍尔元件,这样能够减小温度和干扰磁场对霍尔元件造成影响。霍尔传感器的供电电压为5V时,传感器的静态输出为2.48V,当磁体在距离传感器5~20mm范围变化时,输出电压的变化范围为2.48~2.7V,差分输入时传感器的变化范围为0.22V。当磁钢的N极作为激励时,传感器的差分信号输出为0~0.22V,可以将信号放大6倍。这样可以在很大程度上提高里程仪的非接触检测距离。

图2 信号调理电路
3 单片机系统设计
经过调理的信号需要微控制器进行信号采集、信号处理和数据传输。系统控制器单元主要考虑其必须满足:封装小、带有一定采样精度的 A/D、UART、片内JTAG仿真以及丰富的存储空间等。综合考虑上述主要因素,最终选择了Cygnal公司的C8051F005单片机作为主控芯片,其12位A/D采样速率最大可以达到100kHz。内部集成了异步串口通讯功能,可以工作在全双工方式。通过控制寄存器选择4种工作方式(1种同步方式,3种异步方式),通讯速度、起始停止位也可以根据需要进行设置。UART对外有2条独立的收发引脚,接收和发送电平均为TTL电平。设计中采用外部晶振,主时钟可以通过一个晶体或陶瓷谐振器并接XTAL1和XTAL2而得到。通过CROSSBAR,软件配置P0.0和P0.1分别为发送和接收端口。
如图3所示,磁电式里程仪系统通过串口与主计算机相连,由于系统中数据发送和数据接收距离并不远,而且通信速度要求不高,因此设计时选用串行通信中应用最广泛的RS232接口进行数据传输。又由于单片机UART通信电平为TTL电平,不能直接与电脑进行通信,中间必须要进行电平转换,所以转换芯片选用MAX3232ESE。
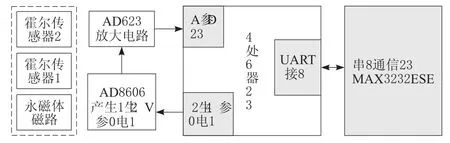
图3 磁电式里程仪结构
在实际应用中,由于传感器的输出信号有正有负,为了使得信号都能够被放大,而且都能够被单片机所采集,就需要将双极性信号转换到ADC的有效输入范围内,可以利用AD623的参考电压解决这个问题,即需要将参考电压至少提高到1.2V。系统将C8051F005单片机的基准电压端VREF(2.45 V)通过运算放大器AD8606变换成1.2V,然后将1.2V的基准电压加到AD623的REF端,使输出电压的零点偏移到1.2V,正好对应C8051F005单片机A/D转换的输入范围,保证ADC的采样输入电压大于0。经过信号调理电路之后,A/D采样到的原始信号如图4所示。
可以看出,虽然经过了信号调理,但是输入信号仍然存在很大的噪声,所以在软件处理中采用数字滤波算法,将信号进行平滑处理。

图4 A/D采样得到的原始信号
将普通硬件RC低通滤波器的微分方程用差分方程来表示,便可以采用软件算法来模拟硬件滤波的功能,低通滤波算法为:

Xn为本次采样值;Yn-1为上次的滤波输出值;a为滤波系数,其值通常远小于1;Yn为本次滤波的输出值。
本次滤波的输出值主要取决于上次滤波的输出值,本次采样值对滤波输出的贡献是比较小的,但多少有些修正作用,这种算法模拟了具有较大惯性的低通滤波器功能。滤波算法的截止频率为:

π为圆周率,取3.14;a为滤波系数;t为采样间隔时间。此处a=1/4,低通滤波的截止频率为1990Hz。
低通滤波后的结果如图5所示,与图4进行对比可以看出,信号的高频噪声滤除效果明显。
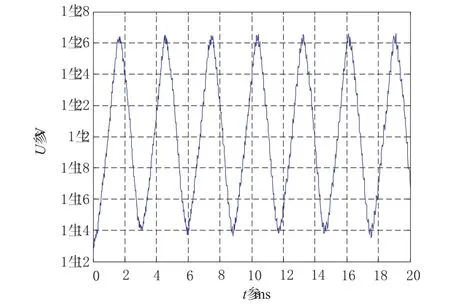
图5 低通滤波后的信号
本设计中假设汽车的最大行驶速率为100km/h,汽车的轮胎周长为1.5m,计算出汽车的转动频率为f=(100000/1.5)/3600=18.5158Hz。按照预定在车轮上最多安装100个磁体时,磁信号最大频率f=1851.85Hz,里程仪的理论精度可以达到0.015m。若采用相邻磁体的磁极相反安装方式,则传感器输出信号的最大频率为f=925.9Hz。但是单片机的A/D采样率最大极限为100kHz,此时信号变化频率为1.852kHz,因为滤波算法为经过数字低通滤波后采样10个点作为1组数,对这组数据进行算术平均,再进行阈值判断,所以50kHz的采样速率采1.852kHz的信号,在信号1个周期内可以采样53个点,可以满足要求,A/D采样间隙为20μs。串口的数据更新速率为100Hz,也就是每隔10ms,串口更新1次数据。利用A/D采样速率来确定数据的更新时间,当A/D采样50个点的时候,时间为10ms,此时置位发送标志位,里程仪通过串口传送数据。定义数据传输格式为7个字节,数据帧的帧头为aa,帧尾为55。第2个字节到第6个字节是里程脉冲数,依次从低位到高位。磁电式里程仪系统软件的总体设计流程如图6所示。

图6 软件流程
4 实验验证
将里程仪安装在经过改装的江铃全顺6593D2-H型客车上,磁体安装在车辆轮胎的外周上。当车辆行驶时,与车体固定在一起的线性霍尔元件能够检测到周围磁场的变化,当磁铁离霍尔元件最近时,电压最大,霍尔元件输出的是正弦波形,通过检测波形中波峰点的个数达到里程计数的目的。实验中霍尔元件与磁铁的距离检测为20mm。当安装100个磁体时,里程仪的刻度因子(轮胎周长为1.5m)为0.015m。里程仪发送数据为7个字节,数据帧的帧头为aa,帧尾为55。里程仪将里程数通过串口实时发送,为了实验中能方便接收数据,使用NI公司开发的 LabWindows/CVI[7]软件开发了数据接收软件。
数据接收软件主要完成下面几个功能:
a.接收下位机的里程计数,与用户输入的里程仪刻度因子进行运算,计算车辆行驶里程。同时每1s更新1次速度信息。
b.通过使用上位机程序里面的计时模块,将时间信息、里程信息和速度信息保存为文本文件,便于对数据进行进一步的处理。
c.能够手动配置端口通信参数。
d.实时将接收到的数据在接收窗口栏显示。
将设计的磁电式里程仪测得数据与实验室现有光电式里程仪测得数据进行对比,如表1所示,最大测量绝对偏差为0.0135m,小于刻度因子0.015 m,满足车辆导航的应用要求。
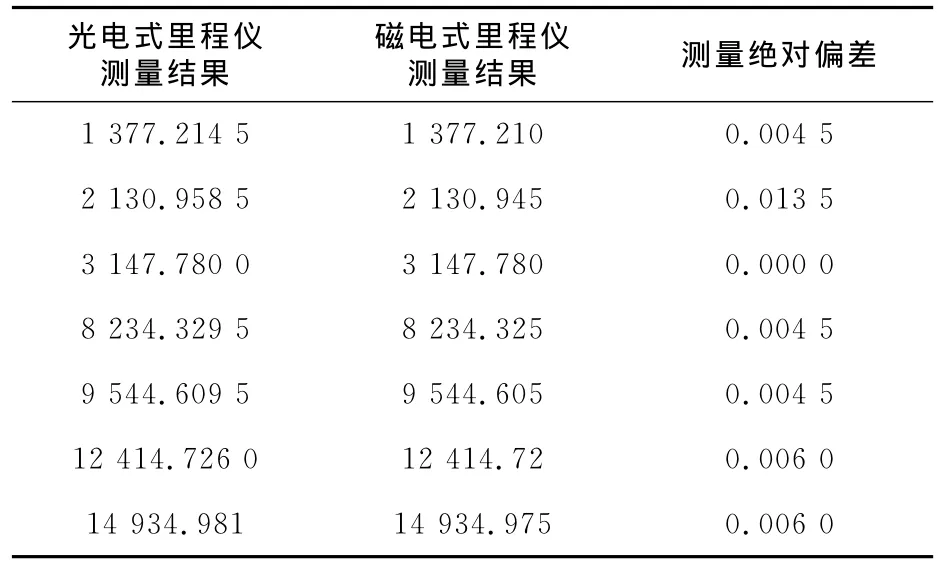
表1 实验结果 m
5 结束语
在分析了现有常用里程仪的优缺点之后,提出了霍尔式磁电里程仪的设计方案,最后通过跑车实验验证了该系统能够提高非接触测量检测距离,最高测量精度可以达到0.015m,满足车辆导航的应用要求。另外,安装方式简单和低成本,使得该设计具有很大的实用价值。
[1]尚峰斌.车速里程表的工作原理及优缺点[J].汽车实用技术,2012,(10):55-57.
[2]王耀金.高精度里程仪测速精度研究[D].西安:西北工业大学,2007.
[3]刘 鹰,胡彦亮.基于数字式里程仪的INS/里程仪导航系统[J].弹箭与制导报,2008,28(4):59-78.
[4]林绍华.霍尔传感器原理及在车速传感器中的应用[J].轻型汽车技术,2003,12(5):14-16.
[5]邱淑贤.霍尔式汽车车速传感器检测系统[J].长春工业大学学报,2010,31(3):319-323.
[6]杨俊恩,孟志东,杨国鹏,等.差分霍尔传感器的转速测量技术研究[J].仪表技术,2010,(10):66-70.
[7]王建新,杨世风,隋美丽.LabwWindows/CVI测试技术及工程应用[M].北京:化学工业出版社,2006.
