多源高分辨率遥感影像自动匹配算法
2014-08-25郭俊喜
郭俊喜
(神华地质勘查有限责任公司,北京 100011)
多源高分辨率遥感影像自动匹配算法
郭俊喜
(神华地质勘查有限责任公司,北京 100011)
提出一种基于同名直线约束的多源高分辨率遥感影像自动匹配方法。对影像建立高斯滤波模型去噪,然后进行边缘检测,在边缘影像上进行Hough变换,通过端点检测的方法来获取直线;通过粗匹配参数进行同名直线粗匹配,应用梯度模型对同名直线进行精匹配;对影像提取特征点,特征点经过同名直线约束后,在对应影像上利用同名直线约束建立匹配范围。采用最小欧式距离准则在给定范围内提取初始同名点;利用RANSAC算法剔除错误同名点对,以获取最终的匹配结果。实验结果表明,与传统的SIFT匹配算法比较,方法具有可靠性好、提取同名点数量多的优点。
多源;遥感影像; 匹配;约束
随着遥感技术的快速发展,利用高分辨率立体像对建立高精度地面三维模型成为可能,并在一些领域中发挥作用[1-4]。但在实际应用过程中,由于卫星拍摄影像视角不同,无法完全通过一种传感器的遥感数据获取地面足够的信息。因此很多学者采用不同遥感卫星获取数据,对地面进行全面刻画观测[5]。因而需要将不同卫星传感器获取的遥感影像进行综合处理,得到更加丰富完整的信息。但是,由于不同传感器影像的成像机理和成像条件不同,影像综合处理必须在精确匹配的前提下进行,换言之,影像匹配是影像综合处理的前提条件。
近年来,多源高分辨率遥感影像的匹配研究已取得较大的进展[6-8]。但从当前的研究热点来看,大部分多源影像的研究着眼于较低分辨率影像间匹配,而面向多源高分辨率遥感影像间的匹配问题研究较少。有关研究也表明,基于特征点利用影像纹理信息进行匹配的方法不适用于多源高分辨率卫星遥感影像[9]。在此基础之上,本文通过分析多源高分辨率遥感影像的特点,提出一种基于同名直线约束的特征点匹配方法。
1 匹配原理
图1为匹配方法的主要流程图。首先对影像进行边缘提取,通过Hough变换获取影像特征直线,然后计算同名直线。其次提取特征点,采用同名直线对特征点进行约束,利用该同名直线确定特征点匹配范围。在该范围内,通过计算特征点间欧氏距离的方法进行同名点的寻找,最后采用RANSAC算法剔除误匹配点,实现多源高分辨率遥感影像的自动匹配。
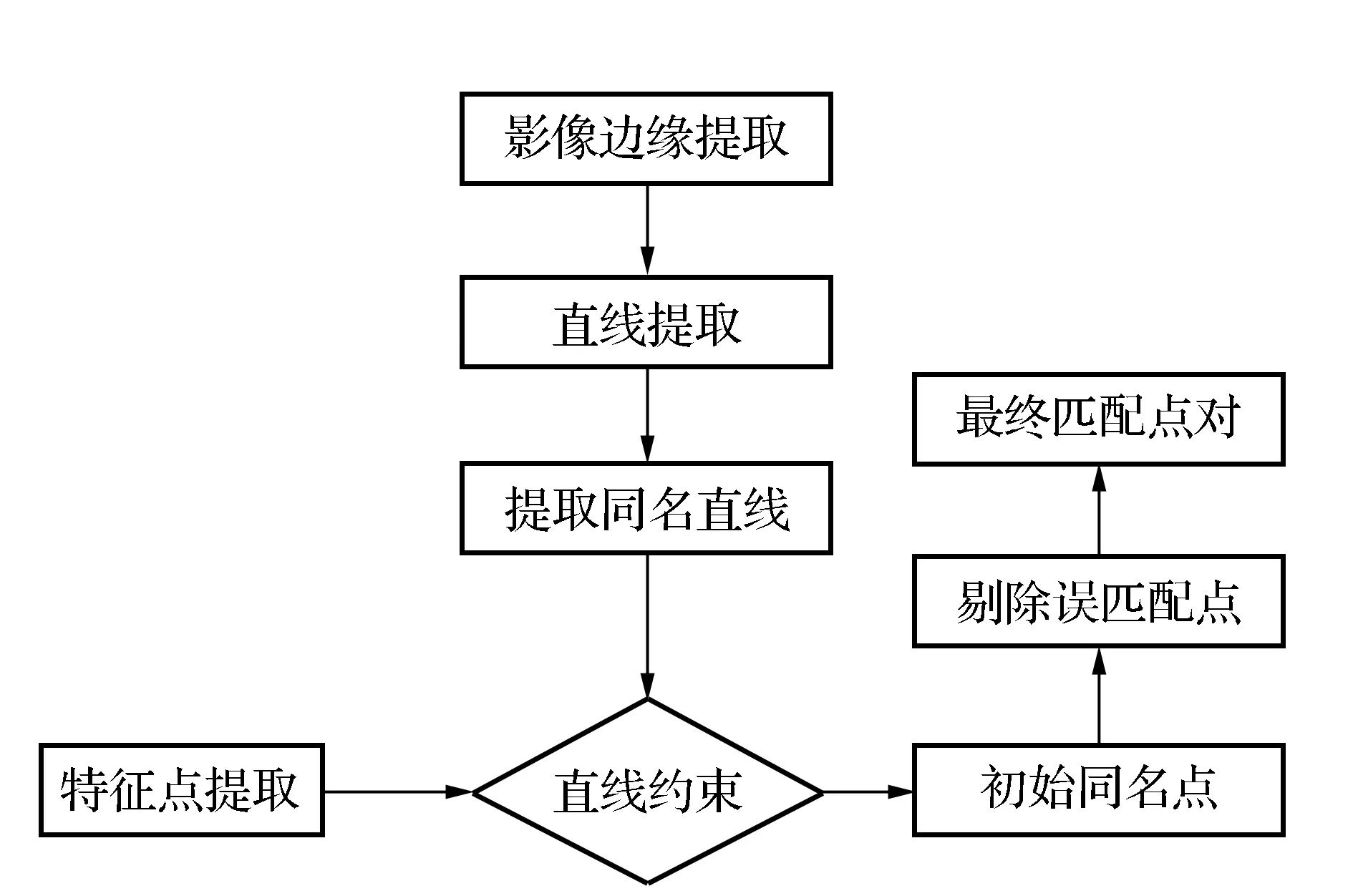
图1 匹配方法流程
1.1 直线特征提取
线特征是影像灰度的一种集合特征,对影像间的灰度差异不太敏感。尤其是在灰度差异较大的多源影像上,线特征不仅便于提取(例如河道、农田、沟渠、房屋建筑物的四边均可视为直线),而且线特征相对于点特征更加稳定,受到单像素变化影响不大,有利于阴影大小、方向变化问题的解决。
采用Canny算子提取影像边缘,通过八邻域的方法剔除孤立点。在Canny算子的高低阈值设定过程中,采用对梯度进行模糊分类的自适应方法来确定高低阈值[10]。
基于上述提取的影像边缘点,利用传统的Hough 变换方法进行直线的拟合,其基本思想是利用点-线在不同空间形成的对偶性。但在用于检测直线时,Hough 变换计算量很大并且需要很大存储空间[11]。因此本文采用一种分块处理的方法,即将影像分割成一定大小的影像块,然后对每块影像进行Hough处理。通过这种分割算法,降低计算上的运算量,加快提取直线段的时间。但这种方式易使得处于不同影像块之间或包含在两块影像内的直线段无法提取,并且相邻影像块之间共线直线段容易出现断裂或者重叠问题。对于这些问题的处理方法是:首先对漏检问题,在进行影像分块时确保相邻影像块的重叠度,防止漏检情况的出现;其次对于影像块间直线容易断裂、重叠问题,可进行直线连接。直线连接需要以下3个条件:①两条直线的斜率一致,确保直线段平行;②在平行的基础上,直线段之间垂直距离低于某一设定阈值,确保直线段共线;③两条线段端点间最小距离应低于某一设定阈值,以此来保证是由于影像分块提取直线导致的直线断裂、重叠。通过满足以上3个条件最终确保两条直线可以进行连接,形成一条新的长直线段,同时剔除原有的两条直线段。
1.2 同名直线提取
苏娟等提出了新的基于直线匹配的多传感器图像配准方法[12],通过统计影像信息建立粗转换模型配准模型,在此基础上构建直线匹配模型获取同名直线,其思路主要从直线的几何特征进行考虑。但笔者经过多次实验后发现,由于苏娟等提出的算法中存在粗转换模型误差,这使得其无法解决在粗差范围内相近平行的直线匹配问题。图2中,直线AB、A′B′在影像上均为一条参考直线对应两条候选待匹配同名直线,由于均在粗差范围内,并且斜率保持一致,使得在这种情况下参考直线无法准确捕捉到真实的同名直线。通过图2可以观察到,两条直线虽然平行,但存在灰度支持区域不同、梯度方向不同等差异。通过多次实验对比分析发现,在相同分辨率的影像上可以进行支持区域的构建,但对于尺度不同的影像由于需要尺度调整,一部分影像信息出现损失,无法适用于非相同分辨率的影像。因此从直线匹配的通用性上考虑,笔者在苏娟等方法的基础上,利用直线梯度的方向对比来解决上述问题。
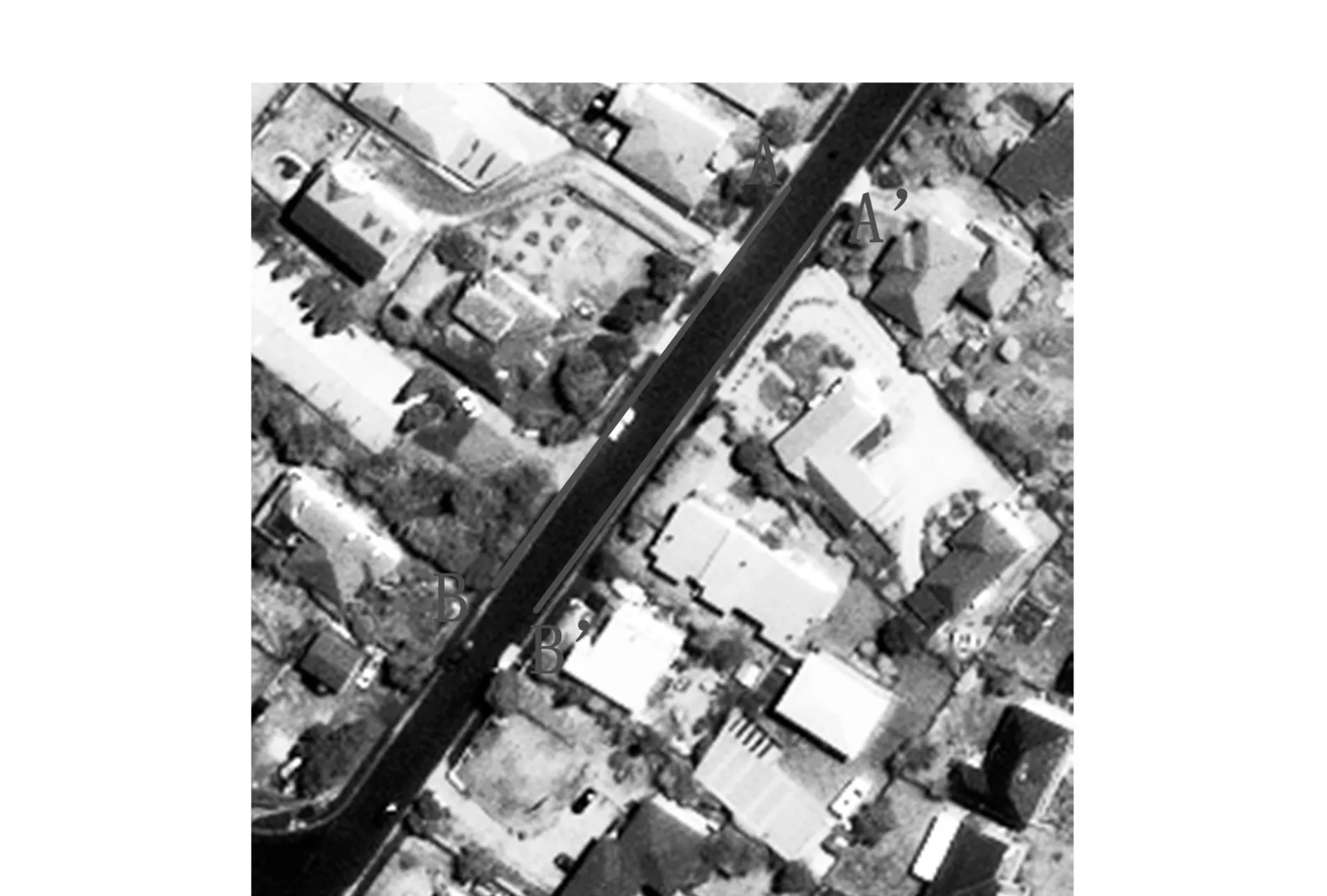
图2 直线误差示意图
要想获得好的直线梯度方向提取结果,就必须要求在检测阶段能滤除部分噪声。因此,本文采用垂直Sobel算子来进行直线梯度的提取。由于所提取直线段在不同影像上长度不均一性,因此必须考虑构建与直线长度无关的直线梯度描述子。笔者通过逐点求取的方式获取直线中所有点的梯度方向,对所有点梯度方向求取平均值α,以此来降低直线段长度变化对梯度方向的影响,采用式(1)来求取目标同名直线。
F(x)=|a′-a|-γ.
(1)
其中:F(x)为目标函数,其取值应小于预先设定的阈值η;a为待匹配直线梯度方向;a′为参考直线梯度方向;γ为粗配准模型中的旋转角度,可通过文献[12]方法求取。
1.3 影像的匹配策略
本文提出一种针对多源影像的匹配策略。首先利用SIFT算子提取影像特征点并进行特征描述,然后判断待匹配特征点是否在同名直线范围内,对在范围内的特征点计算基准影像上的同名直线,通过该直线确定匹配范围,在该范围内对特征点进行搜索从而实现同名点的提取。图3(a)中圆点为待匹配影像上SIFT算法提取的特征点,可以看到其在黑色直线(同名直线)上。图3(b)中黑色直线为对应基准影像上同名直线。

(a) 待匹配特征点在同名线上

(b)确定搜索范围内特征点集
对同名直线两侧建立同名点搜索范围,即以同名直线为中心,处于范围内的特征点构建针对待匹配影像特征点的特征点集,从而使得图3(a)中圆点对应于参考影像上的特征点集。如图3(b)所示,同名直线范围内的点(圆点)均可被划分为与图3(a)中特征点对应的候选同名特征点集,通过对比计算最小欧氏距离的方法得到同名点。
为了提高多源影像匹配的精确度,采用一种随机抽样一致性算法 (RANdom SAmple Consensus,RANSAC)进行误匹配点去除。
2 实验结果与分析
2.1 实验数据
图4为两组用于多源影像匹配实验的遥感影像像对,图4(a)为WorldView-IKONOS像对(a1),拍摄影像区域为大连市某一山区,影像的获取时间为2009年,IKONOS影像的获取时间为2006年,两幅影像之间的获取时间间隔为3年。图4 (b)为GeoEye- IKONOS像对(a2),影像覆盖区域为澳大利亚 Hobart 地区,GeoEye影像的获取时间为2009年,IKONOS影像的获取时间为2003年,像对影像间获取时间间隔为6年。匹配实验中,a1像对以WorldView影像作为参考影像,a2像对以GeoEye影像为参考影像,a1,a2像对中的IKONOS影像均为待匹配影像。其中,WorldView影像和GeoEye影像的空间分辨率是0.5 m,IKONOS影像空间分辨率为1 m。为利于影像分析,选取的WorldView 影像和GeoEye影像大小均为 1024像素×1024像素,IKONOS影像均为 512像素×512像素。
2.2 实验结果与分析
考虑到多源高分辨率遥感影像间存在较大的空间分辨率差异,因此本文考虑采用SIFT算法进行特征点提取及描述。实验结果表明:利用SIFT算子对像对中的影像进行特征点提取,在所有影像上均可得到数量较大的特征点,保证同名点提取上的数量性;对两对影像,绝大部分待匹配影像特征点可利用影像中的同名直线来约束,即大部分特征点可利用同名直线来约束匹配。
SIFT算法在多源影像间存在旋转、尺度、光照差异时表现相对稳定。因此在对所提出方法进行分析评价时,以SIFT匹配方法为评价依据。为了提高影像匹配的效率和精度,采用一种瓦片分块提高匹配效率,利用RANSAC算法剔除匹配中的错误点对。表1为本文方法和SIFT算法的影像匹配比较结果。其中,“匹配点”表示影像匹配初始结果,“正确点”表示采用RANSAC算法剔除粗差后剩余的正确匹配点,同时x,y方向像元精度计算依据均以像对中参考影像像元为基准。

图4 实验影像

表1 匹配方法比较
表1实验结果表明,利用SIFT算法进行多源高分辨率遥感影像匹配时,其算法平均正确匹配得到20对匹配点,像对间旋转超过90°的a1组仅能够获取到17对同名点,旋转变形较小的a2组取得25对同名点,说明该算法的同名点匹配率较低;而在本文的方法中,通过建立直线约束模型,限定了搜索同名点的范围,从而有效地提高了匹配点的成功率。实验中对两种像对平均获取正确匹配点80对,其中a1组中获取同名点67对,a2组中匹配同名点94对。
从影像匹配精度上来看,SIFT方法和本文方法匹配中误差均在1~2像素之间,这说明本文算法和SIFT方法精度处于同一个数量级,表明本文算法在充分保证影像匹配精度的情况下,同时能够提高同名点的数量。由于在两对像对中多源影像间存在较为剧烈的几何变形,其中尤以a1组影像像对最具有代表性,并且在影像匹配精度评定分析上是通过0.5 m高分辨率影像作为参考,因此,1~2像素表明地面误差在0.5~1 m之间,说明本文算法从精度上能够保证生产的需求。
对比本文算法与SIFT的匹配效率可以看到,SIFT算法和本文算法之间运算时间比值为5∶8,而获取同名点的数量比值为1∶2.4,表明本文算法具有更高的匹配效率。
如图5、图6所示,通过对影像的局部区域分析表明,本文方法所取得的同名点分布更加均匀。其中,a1组影像像对中SIFT方法仅能够获取1个匹配点,而利用本文方法在影像中可以得到8个同名点;a2组的匹配点对比则是3对和28对,这充分说明本文所选用方法提取匹配点分布上的合理性。

图5 第一组影像匹配点局部放大图

图6 第二组影像匹配点局部放大图
3 结束语
针对多源高分辨率遥感影像存在匹配率低、可靠性差等问题,本文选取具有代表性的两组多源高分辨率遥感影像像对作为研究对象,提出一种通过同名直线建立特征点搜索范围的方法,减少同名点搜索范围并最终实现多源高分辨率遥感影像的自动匹配。通过本算法与传统的SIFT匹配算法比较,证明方法具有可靠性好,提取同名点数量高的优点。
[1]E BALTSAVIAS, M PATERAKI, ZHANG L.Radiometric and geometric evaluation of IKONOS geo-images and their use for 3D building modeling[J]. Joint ISPRS Workshop on High Resolution Mapping from Space, Hannover, 2001:1-21.
[2]ZHANG L, GRUEN A. Multi-image Matching for DSM Generation from IKONOS Imagery[J]. ISPRS Journal of Photogrammetry & Remote Sensing, 2006,60:195-211.
[3]王赫, 徐克红, 王永富. 广义立体像对匹配方法研究[J]. 测绘工程, 2011, 20(4): 26-30.
[4]范兴旺, 翁永玲, 胡伍生, 等. IRS-P5 立体像对提取 DEM 及精度评价[J].遥感技术与应用, 2010, 25(4) :547-551.
[5]王瑞瑞,马建文,陈雪.多源高分辨率遥感影像自动配准技术的研究进展[J]. 遥感信息,2011(3):121-127.
[6]袁修孝, 刘欣.基于有理函数模型的高分辨率卫星遥感影像匹配[J]. 武汉大学学报:信息科学版,2009, 34(6): 671-674.
[7] 季顺平,袁修孝. 基于RFM的高分辨率卫星遥感影像自动匹配研究[J]. 测绘学报, 2010, 39(6): 592-598.
[8] 李芳芳,贾永红,肖本林,等.利用线特征和 SIFT 点特征进行多源高分辨率遥感影像配准[J]. 武汉大学学报:信息科学版,2010,35(2):233-236.
[9] 戴激光,宋伟东,贾永红,等.一种新的异源高分辨率光学卫星遥感影像自动匹配算法[J]. 测绘学报, 2013, 42(1):80-86.
[10]李牧, 闫继红,李戈, 等.自适应Canny算子边缘检测技术[J]. 哈尔滨工程大学学报,2007,28(9):1002-1007.
[11]高隽, 张维勇, 韩江洪. 基于神经网络的Hough 变换及其光电实现[J]. 电子学报, 1999,27(2): 37-39.
[12]苏娟, 林行刚, 刘代志. 一种基于结构特征边缘的多传感器图像配准方法[J]. 自动化学报, 2009 , 35 (3) :251-257.
[责任编辑:张德福]
Automatically matching method for multi-source high resolution remote sensing images
GUO Jun-xi
(Shenhua Geological Exploration Co.,Ltd, Beijing 100011,China)
It presents a matching method for multi-source high resolution remote sensing images based on corresponding lines. Firstly, Gaussian model is employed for image filtering, then line extracting is performed by Hough transform and Endpoint detection algorithm from the edge of the image; secondly, a coarse-to-fine line matching strategy is proposed based on coarse transformed parameters and gradient model; thirdly, feature points are extracted and restricted by corresponding lines, and the constraint model is built by corresponding lines; fourthly, the minimum Euclidean distance criterion is used to extract the initial homonymy points within the window constraint; at last, RANSAC is imbedded to eliminate mismatching points. Experimental results verify that the presented method has higher matching point than that resulted from SIFT matching method with the better reliability.
Multi-source; high resolution remote sensing images; matching; Constraint
2013-10-28
辽宁省教育厅创新团队资助项目(2009T043)
郭俊喜(1963-),男,高级工程师.
P237
:A
:1006-7949(2014)07-0017-05
