仿真技术在微特电机课程教学中的应用
2014-08-23易龙芳顾菊平
易龙芳,张 蔚,顾菊平
(南通大学电气工程学院,江苏南通 226019)
0 引言
随着电机理论、控制理论、电力电子技术以及新材料等技术的发展,各种新型电机以及电机应用新技术更是日新月异。在"微特电机及其系统"课程教学中,学生不可能从该课程中学习到所有类型的控制电机与特种电机,因此要求在教学中应注意加强电机基本理论与分析研究方法,从而在遇到新技术、新问题时,使学生有通过自学去掌握的能力[1]。
微特电机及其系统的运行性能取决于电机本体和控制器两者的性能以及相关参数的设置配合。因教学条件和实验设备的局限,该课程教学及实验内容以基本理论和简单验证为主,无法直观展示电机参数或控制器参数对电机运行性能的影响。然而,我们借助仿真手段可以方便地修改参数,获得电机运行的电压波形、电流波形、功率和转矩等波形或数据。这一手段有助于学生对电机理论知识的理解,同时也可以对电机电压和电流等波形进行分析,反过来进行对参数的优化。
1 教学具体实施步骤
(1)考虑到该课程的课时有限,我们以培养学生分析问题和解决问题的方法为出发点,选用具有较大发展应用前景的几种典型电机;
(2)对选取电机的基本结构和工作原理进行讲解,使学生初步建立了对象电机的预备知识;
(3)简单介绍电机本体的设计步骤,根据给定的指标计算电机定子和转子主要尺寸以及绕组参数等,再对电机进行有限元建模、剖分和后处理分析,将有限元分析结果导出,以便于仿真模型调用;
(4)根据理论分析的数学模型,借助于Matlab的simulink模块和m函数,建立电机及控制系统的一体化仿真模型;
(5)对不同参数下的模型进行仿真,分析反电势、电流波形、转矩和功率等仿真结果,探讨参数优化的方法;
(6)对电机的理论知识和参数对电机及其系统的影响进行总结。
本课程选取了获得广泛关注和应用的永磁无刷直流电机BLDCM和开关磁阻电机SRM等典型电机为例进行讨论。
2 永磁无刷直流电机BLDCM
我们首先对给定的电机进行电磁分析与设计,根据电机主要尺寸的基本关系式计算电机的极数、定子尺寸和转子尺寸,对绕组进行计算,确定永磁体和硅钢片等材料的选取[2]。
我们根据计算结果对电机进行有限元分析。主要步骤包括建立几何模型、编辑和设定材料、设置线圈和电路连接、设置边界条件、设置网格参数、求解和后处理[3]等。图1为示例样机的电磁分析。
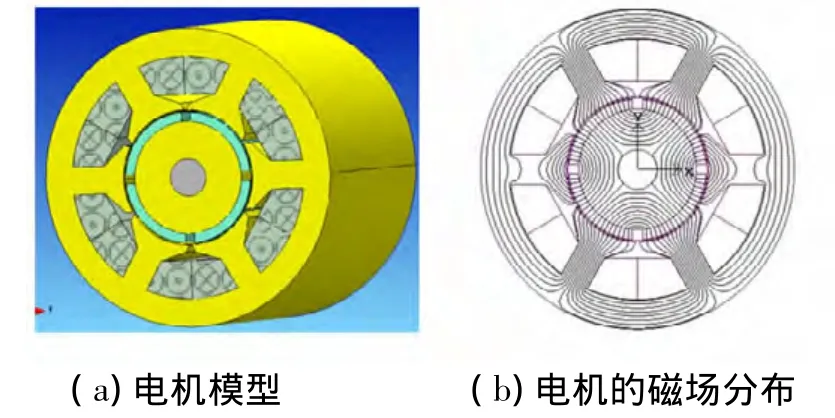
图1 无刷直流电机分析
BLDCM驱动控制的模型,是仿真系统中较为关键的部分。根据数学模型建立电机及其驱动控制的一体化模型,如图2所示。设定仿真条件:假定电机初始以转速800rpm空载运行,在t=0.1S时负载突变至0.5Nm,在 t=0.3S时理想空载,转速提高至1000rpm,在t=0.5S时负载再突变至3Nm。

图2 无刷直流电机系统仿真模型
根据两相导通三相六状态BLDCM系统仿真结果其电流波形如图3所示。电机每60°电角度换相一次,在每个换向区内始终只有两相导通,每相电流一次持续导通120°电角度。相电流波形并非标准的方波,换向导通时电流有个上升过程,在中间换相时刻会产生一定程度的下陷,负载增大时这种现象更加明显,这是因为绕组电感的存在,电流不能突变使得换相不可能瞬间完成,会有一个缓慢上升和下降的过程,这与理论说明一致。
图4示出电机的电磁转矩特性。结合图3和图4可以看出,在t=0.1S前,电机空载运行,绕组电流几乎为零;在t=0.1S时突加0.5Nm的负载,绕组电流随负载转矩而增大;在t=0.3S时,由于给定转速由800rpm突然增加到1000rpm,绕组电流和电磁转矩均瞬时增大,但实际转速不能突变,于是给定转速和实际转速之间速差突然增大,就要求电机电磁转矩增大,根据T=CTΦIa(CT为转矩常数,与电机的极对数、极弧系数、绕组匝数有关;Φ为每极磁通;Ia为绕组电流),所以电流突然增大,直至转速达到一个稳定值。在t=0.5S时负载增大为3Nm,绕组电流也随之增大。从电磁转矩波形可见,BLDCM的电磁转矩脉动比较大,对比转矩脉动出现的时刻,可以看到是在绕组电流换向时刻因电流波动导致的。
根据电机理论,转子旋转磁场会在定子绕组中产生感应电势。在永磁无刷直流电机中,定子绕组采用集中整距绕组,永磁体产生的方波磁场在定子绕组中感应的电动势为梯形波,如图5所示。根据BLDCM线电动势 E=CeΦn(Ce为电势常数,与电机的极对数、极弧系数有关;Φ为每极磁通;n为转子转速)知,转速增大会导致电动势的增大,从仿真结果可以看到,在t=0.3S转速突变时,反电动势成比例增大。
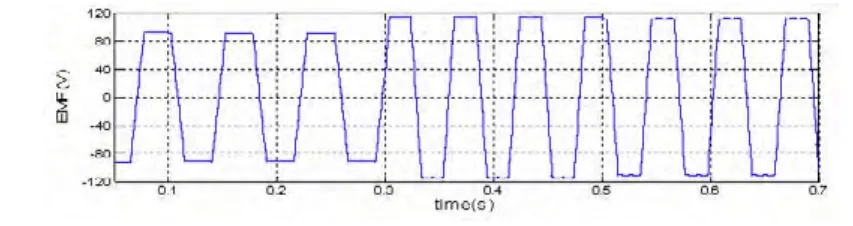
图5 电机反电势波形
3 开关磁阻电机SRM
与无刷直流电机类似,我们先根据电机理论对电机进行初步计算,再用有限元分析软件对电机电磁分析得出电机本体参数,并将这些参数与Matlab结合,建立开关磁阻电机的仿真模型。图6所示为6/4极的三相开关磁阻电机仿真模型。
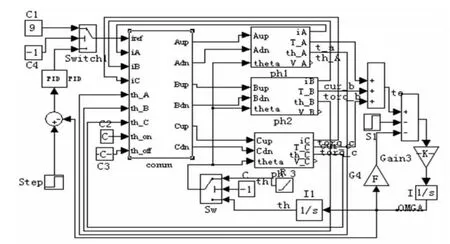
图6 开关磁阻电机系统仿真模型
SRM电机的电磁转矩是由转子旋转时气隙磁导的变化而产生的,其方程为Te=0.5i2dL/dθ(L为绕组的电感,θ为转子位置角)。从该方程可知转矩的大小与电流平方正比,但转矩的方向与电流方向无关。如在电感上升区间即dL/dθ>0时绕组通电,则产生正转矩,电机运行在电动状态;在电感下降区间dL/dθ<0时绕组通电,则产生负转矩,电机运行发电状态。根据电机有限元分析结果,可以得出电机的电感与转子位置角的关系曲线,如图7所示,由电感波形可知,在转子位置角度0-45°,电流可以产生正转矩。

图7 绕组电感与转子位置角关系图(i=8A)
SRM电机的功率开关元件的导通和关断的控制对系统的运行性能影响很大,开关角位置优化控制也获得广泛关注,本文以开通角对SRM电机运行性能的影响为例说明。开关磁阻电机绕组电感较大,如果开通角θon过大,电感的存在将使电流上升缓慢;同时为避免绕组电流关断后延续到负转矩区,需考虑将绕组提前关断。借助于仿真计算,可以通过修改参数直观获得电流和转矩波形,这有助于初学者对理论的理解。
本例样机给定的转速为17000rpm,其负载值为0.4Nm。图8 为开通角 θon=5°,导通角 θ=35°的仿真结果。从图中可以看到,由于关断角θoff=5°+35°=40°,功率开关管关断后,电流由主电路中的续流二极管续流。此时绕组处于电感较大的位置,电流下降较缓慢。图8(a)可看到因实际电流为零处置约在60°,处于电感下降区间dL/dθ<0。该部分电流将产生负的电磁转矩,如图8(b)所示。另外,从图8(c)三相合成负载转矩可以看出,开关磁阻电机的脉动较大,这也是开关磁阻电机的一个缺点。
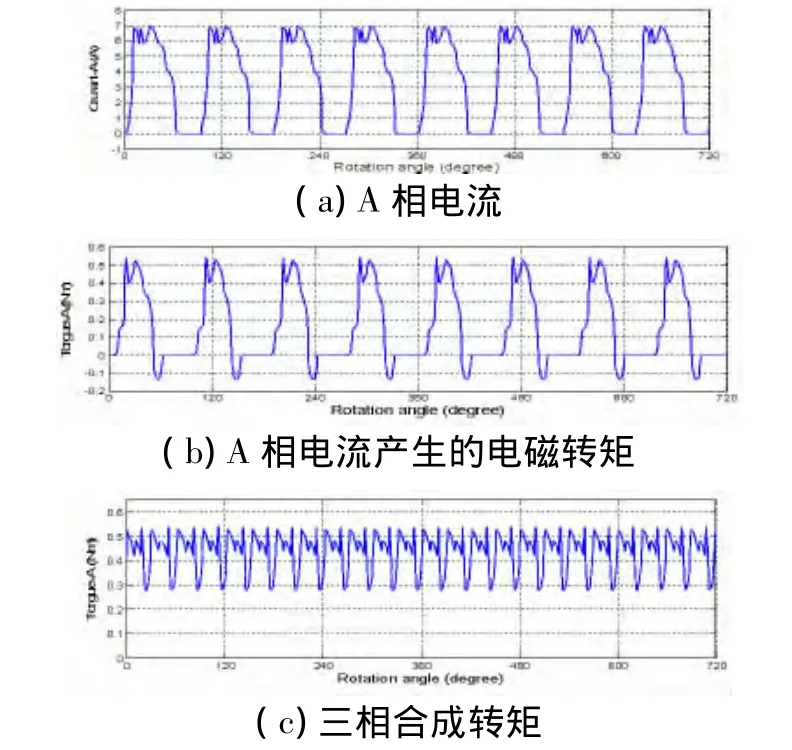
图8 电机开通角5°和导通角35°仿真结果
如果开通角继续增大,电流上升将更加困难,甚至不能到达设置的电流斩波线,电机运行性能将继续恶化。图9为开通角θon=10°和导通角θ=35°的仿真结果。从图9(a)可以看到,由于电感较大,绕组电流上升和下降较缓慢,该相电流将产生较大的负电磁转矩,如图9(b)所示。另外从三相合成负载转矩可以看出电动机无法运行在0.4Nm的负载下运行,电磁转矩仅约为0.1Nm,如图9(c)所示。

图9 电机开通角10°和导通角35°仿真结果
反之,如果开通角适当提前,如图10所示有开通角θon=-5°。由于此时电感很小,电流上升速率很快,虽然关断时处于电感较大位置,但对固定导通角的控制方式而言,关断角θoff=30°,增加了到负转矩区的下降时间,可以使电机获得较好的运行性能。

图10 电机导通角-5°和35°的仿真结果
4 结语
我们在微特电机这类课程教学中,根据电机的基本理论建立仿真模型,分析不同条件仿真的结果,可以实现启发式教学,让学生通过现象分析问题的本质,从而使所学知识融会贯通,达到培养学生分析和解决问题的能力,提高了教学效果。
[1] 程明.微特电机及系统[M].北京:中国电力出版社,2008.
[2] 唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,1997.
[3] 赵博、张洪亮.Ansoft 12在工程电磁场中的应用[M].北京:中国水利水电出版社,2010.
