基于多Lyapunov函数方法的模糊滑模控制算法*
2014-08-22杨治平陈姗姗聂振华
杨治平,陈姗姗,聂振华
重庆电子工程职业学院,重庆 401331
All kinds of robots are introduced and applied that is fast extremely under the multiple motor controlled,it makes control algorithm and implement technology of the motors that are accelerating updated and innovated.In the complex control system of the robots,all these characteristics such as multi-node,multi-joint,multi-lever,multi-dimensional movement and multi-action combined,many problems of the motors controlled are made.In the system,allocated the motors and the micro-motors have different functions,but the structure and the run of the motors has a generality,the control algorithm is structured that should have also relatively generality.For the motors,using single parameter optimal control given such as the literature[1-2],it cannot adapted to generalize consideration of multiple motor control algorithm obviously.The study gives the control algorithm,using the general analyzing think,in collection of the motor output speed,stable control of the motor running and restrained of the modeling error,Lyapunov function methods are repeated to design the control algorithm,in order to achieve object of the motors controlled.Through generality of the control technology is enhanced to provide a reference path for grafting of the algorithm of the motors controlled.
1.Estimation algorithm of the motor speed
The complexity system of high-dimensional robot,the motors and the micro-motors are applied to finish operation.In detection of the output speed of the motor,using separate physical speed sensor,not only increases additional coaxial device,but also increases the complexity and the equipment cost of the system.The sensorless speed detected algorithm is used to estimate the output speed of the motor,has been the forefront control strategy,the estimation algorithm of the motor speed is given below.
Equation of d-q axis stator voltage and current are given respectively as:
Where,ψ is flux,L is the inductance v is the stator voltage,R is the resistance,i is current,σ =1-L2m/(LrLm)is the electric leakage coefficient of motor,the subscript r and s denote values of the rotor and the stator respectively.
The relation to the rotor flux and the motor speed,the stator current are shown respectively as:
Where,wris the rotor electrical speed and Tr=Lr/Rris the rotor time constant,when Equation(3)and E-quation(4)are used to estimate the motor speed,then stator current^idsand^iqsare estimated values referred to the idsand the iqs,^wris the estimated value of the rotor electrical speed.The difference between the stator current and the estimated stator current are obtained respectively as:

Equation(5)is multiplied byψqrand Equation(6)is multiplied by- ψdr,and then added together obtained:
From Equation(7),the rotor speed error is obtained as follow:

From Equation(8),the motor speed can be calculated by the stator current and rotor flux indirectly.The feasibility of the sensorless motor speed controlled can be verified by Lyapunov stability theory.Applying Lyapunov stability theory,the adaptive control law of the motor speed is able to derived:

Where,α is the adaptive gain.For the error of adaptive control law demoted to zero in the end,the Lyapunov function is selected as:

To derivate equation(10)and to combine equation(8)obtains

For direct determination method of Lyapunov,because V(t)is strictly positive definite,while(t)is negative definite,and V(t)tends to infinity with(t)tends to infinity,because ewr(t)is asymptotically stable in equilibrium point,then the ewr(t)tends to zero with time tends to infinity.
To substitute equation(11)into selected Lyapunov function obtains:

To solve the above differential equation obtains:

It shows that the rotor speed error tends to zero with time tends to infinity.For the above analysis,the rotor speed can be got by estimation of the stator voltage and current,to avoid the use of physical speed sensor.
2.Sliding mode control system
In general,the mechanical speed equation of an induction motor can be written as:

Where,J and B are the inertia constant and the friction coefficient of the induction motor respectively,TLis the external load,wmis rotor mechanical speed in angular frequency,which is related to the rotor electrical speed by wm=2wr/p where p is the pole number,Teis the generated torque of motor.The relation between the stator current and the generated torque of the motor is written as:

Where,KTis torque constant,to substitute equation(15)into equation(14)obtained:

Where,a=B/J,f=TL/J,b=KT/J,because equation(16)with uncertainties,it is modified as:

Where,the termsΔa,Δf and Δb represent uncertainty of the terms a,f and b respectively,they affect normal operation of the motor.It is necessary that take effective control measure to eliminate these uncertainty,in order to ensure smooth run of the motor.
The speed error of the motor is defined as:

Where,w*m(t)is the command rotor speed,to differentiate Equation(18)and to relate with the previous derivative equations yielded:

Where,u(t)is the speed controlled signal,d(t)is sum of uncertainty terms of the system,the equation(19)can be written dynamic control signal that relates to track speed about the uncertainty system as:

The uncertainty terms have been collected in the signal d(t).

To design effective control u(t),to make the velocity error tends to zero with time infinite,it is the key for tracking control of the motor speed.Use of the sliding mode control,employing constraint function of the sliding mode surface,it suppresses the error of the system parameter in the prescribed scope,and ensures speed tracking characteristics in the sliding control.Under the strong control function,it ensures robustness and stability of the transition process in the system uncertain and the external disturbance.Design of the sliding mode controller is given below.
The sliding surface selected is as follow:

Where,S(t)is the sliding mode variable,the k is gain constant,a has been defined in equation(16).The Lyapunov function is chosen as follow:

Where,the β(t)is selected as the switch gain in the sliding surface,and defines β~(t)= β^(t)- β(t)that β^(t)is the estimated gain.
Theβ^is switch gain according to follow arrival law:

It is adaptive change.To derivate the Equation(22)and Lyapunov function of the Equation(23),the result is obtained:
Chosen appropriate sliding mode gain,the sliding mode control law to eliminate system error is designed as follow[3]:

Substituting Equation(26)into Equation(25),the below result is obtained:
In design,γis selected for the switch threshold values,in order to make βγ >d,then

To derivate the Equation(27)below result is got:

3.Fuzzy sliding mode control system
Referencing reason think and control principle as the literature[5-6],in the sampling sequence i of the control cycle,switch condition is presented as follow:

The switch gain threshold condition is presented as follow:

By the sliding mode condition,the fuzzy sliding mode control rules are constructed as:
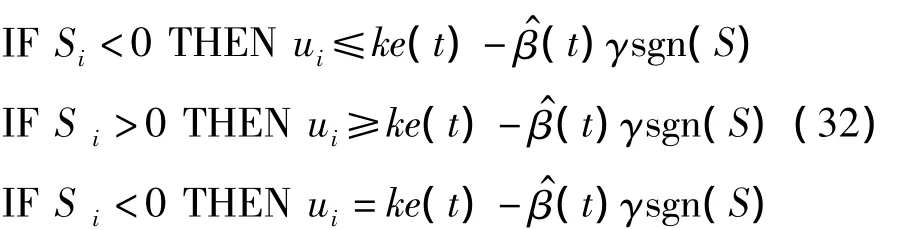
Using the fuzzy rules of the Equation(32),the membership function of Siis shown in Figure 1.
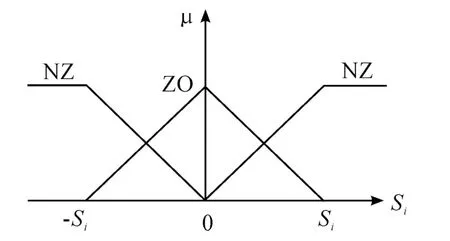
Figure 1.Membership function curve of the NO and the NZ
The fuzzy set of Siselect the NO and the NZ,in order to make membership function to meet symmetry,μNO(Si)+ μNZ(Si)=1 namely,therefore,the fuzzy sliding mode control law of the Equation(32)is implemented successful,it ensures the reliability of the control.
Again applying Lyapunov stability theorem,selection of the composite sliding mode gain βγ is big enough,to make βγ >d established,it makes V˙(t)≤0,but V¨is positive definite,the Lyapunov stability conditions is satisfied.From the Equation(27)into the Equation(32),the fuzzy sliding mode control law is deduced,the uncertainty and random disturbance the system can be overcome,so as to achieve dynamic tracking performance.
4.Simulation analysis
According to the fuzzy sliding mode law,the fuzzy sliding mode control system is shown in Figure 2.
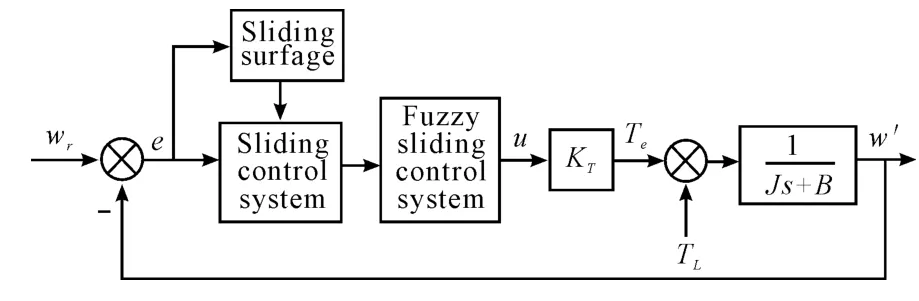
Figure 2.Structure of the fuzzy sliding control system of the induction motor
According to Figure 2 to implement the fuzzy sliding mode control,the simulation procedures are presented as:
1)Application of current tracker and electromagnetic transducer,online collect the stator current and the stator voltage respectively.The Equation(8)is real-time applied to compute the output speed of the induction motor.
2)According to the Equation(18)and the E-quation(22),the sliding surface is built.
3)The Equation(26)is used to calculate the sliding mode control law.
4)For the fuzzy sliding mode control algorithm given in section 3,the fuzzy sliding mode control law is built,and then converting operator KTinto control torque,it acts on speed process of the induction motor to complete dynamic tracking control.

Figure 3.Control process of the motor speed
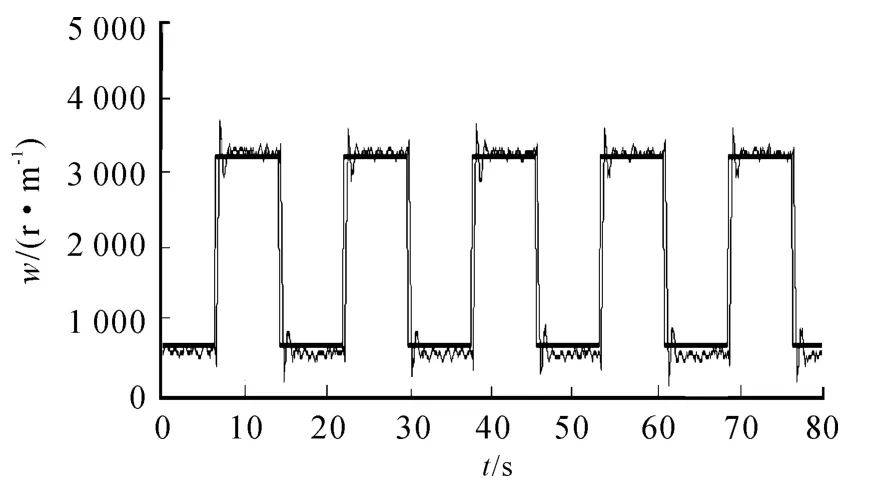
Figure 4.Speed response of the motor controlled process
The control results are shown by the simulation curves in Figure 3 and Figure 4.In the Figure 3,fuzzy sliding mode control processes under the different switch threshold conditions are given.Figure 4 shows response characteristic of the motor speed process.The simulation results show that the control effects are good.
5.Conclusion
The presented algorithm,it is concise and easy to implement,it expanses versatility space of the algorithm.The sensorless soft online estimating algorithm of the motor speed,for a class of predict control,real-time control of the adaptive and self-tuning based on data sampled,which the estimation algorithm to test the output parameters of the motor is universal.Presented variable structure control for the sliding switch to attain,it can be combined with intelligent control,to structure adaptive sliding mode control and self-tuning sliding mode control,it also can be used as an independent control branch and combined with the fuzzy variable structure control,to form a composite control,it brings to more convenient for the algorithm transplanted.
For the sensorless speed detection of the induction motor,the sliding mode control to keep the speed tracking of the motor,as well as the fuzzy control to overcome model error of the system,the method of Lyapunov function and the Lyapunov stability conditions are adopted to design the control law and to complete the assembly of the control,it is advantageous for the grafting of related control algorithm and control technology.The contribution of this research is suitable for multiple motor electromechanical synthetic control system to use.
[1] Yu Sheng Lu.Smooth speed control of motor drives with asymptotic disturbance compensation[J].Control Engineering Practice.2008,16(5):597-608.
[2] Quadi H,Giri F,Elfadili A,et al.Induction machine speed control with flux optimization[J].Control Engineering Practice.2010,18(1):55-66.
[3] George Moustris Spytos Tzafestas P,G.Switching fuzzy tracking control robots under curvature constraints[J].Control Engineering Practice.2011,19(1):45-53.
[4] Chang W J,Ku C C,Ku F C.Observer-feedback fuzzy control with passivity property for discrete-time affine Takagi-Sugeno fuzzy models[J].Systems and Control Engineering,2010,225(3):387-401.
[5] Salah B,Laib L Y,Sissaoui H,et al.Evaluation using online support-vector-machines and fuzzy reasoning.Application to condition monitoring of speeds rolling process[J].Control Engineering Practice,2010,18(10):1060-1068.
[6] Chen Cheng Wu.The stability of oceanic with T-Sfuzzy models[J].Mathematics and Computers in Simulation,2009,80(4):402-426.
