电动伺服变量柱塞泵的变量特性研究*
2014-08-22齐海涛付永领
齐海涛,付永领,郎 燕
1.北京航空航天大学 工程训练中心,北京 100191
2.北京航空航天大学机械工程及自动化学院,北京 1001913.北京控制工程研究所,北京 100190
1.Introduction
The size and direction of output flow could be changed with the adjustment of swash plate angle by variable displacement mechanism in swash plate axial piston variable displacement pump.There are many types of the variable displacement mechanism,and it could be classified as manual,mechanical,hydraulic or electrical,etc.according to the different kind of adjustment.The pump could be classified as constant pressure control,constant flow control or constant power control,etc.according to the output mode[1].
Most of conventional swash plate axial piston variable displacement pump has an executive unit driven by hydraulic servo system,and a small cylinder which is controlled by a servo valve drives the variable displacement mechanism of the pump.The fluid of the variable displacement mechanism is supplied by the pump directly or by a small pump which is coaxial with the pump.This is a mature method and it could achieve a rapid response,but the additional hydraulic executive mechanism is complicated.The application of servo valve will not only increase the system failure rate,but also require extra oil cleanliness.In addition,the traditional method cannot be used in some special applications,such as EHA(Electro-Hydrostatic Actuator)which is not a constant pressure system.It is necessary to take another way to provide driving force for variable displacement mechanism.
To solve the above problems,a novel electrical servo variable displacement hydraulic piston pump was proposed in references[2-5].The new pump is equipped a high-precision gear which is driven by a DC servo motor to regulate the swash plate angle.Therefore,the system structure could be simplified,the system reliability will be improved and the application areas also could be expanded.The operating principle,structure and basic performance of this novel electrical servo variable displacement piston pump have been analyzed in the above-mentioned references.Based on this,this paper will focus on how to achieve the constant pressure control,constant flow control and constant power control of this kind of variable displacement pump through the control of the DC servo motor,and the corresponding designs were proposed,simulated and verified by using AMESim.
2.Constant pressure variable displacement control
The constant pressure variable displacement control keeps pump outlet pressure as a constant value by regulating output flow according to the difference between outlet pressure of pump and setting values of variable displacement mechanism.The traditional constant pressure variable displacement mechanism is composed of a constant pressure valve and a hydraulic cylinder by regulating preloading spring of the control valve to keep pump outlet pressure as a given value.
The constant pressure variable displacement control of electrical servo variable displacement piston pump could be realized in a pressure control loop,which is composed of a pressure sensor installed in the pump outlet,a DC servo motor and a controller.Therefore,the pressure signal could be feedback to the controller of DC servo motor to form a closed loop control.
According to the above principles,the constant pressure variable displacement control model of electrical servo variable displacement piston pump could be built in AMESim[6],as shown in Figure 1.The system is a double closed loop control structure,and the outer loop is pressure control to keep pressure as a constant;the inner loop is swash plate angle control to complete adjustment of swash plate.The swash plate load is acting on the motor output shaft by a torque converter,and the load could be adjusted by the change of orifice.
The corresponding parameters of electrical servo variable displacement piston pump were listed in reference[5].By using the model of Figure 1,the constant pressure variable displacement control simulation could be carried out.The range of simulation time is 0.3 s,the pressure setting value is 100 bar,the size of load orifice could be changed from10%to 15%within 0.15 s,the main drive motor rotation speed is 10 000 r/min,and the simulation results are shown in Figure 2.
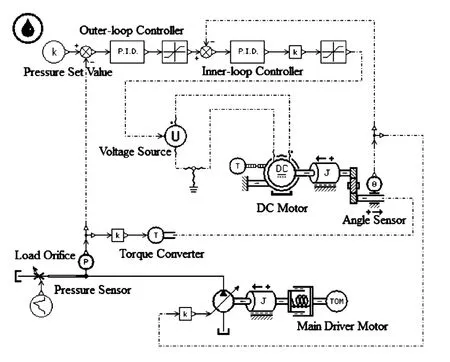
Figure 1.Constant pressure variable displacement control model
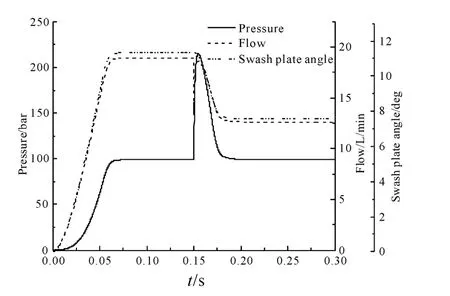
Figure 2.Pressure,flow of pump output and swash plate angle
The pump outlet pressure can be rapidly adjusted to maintain a constant value when the load changes.The pump swash plate angle and output flow could be reduced accordingly with the increase of load pressure in order to decrease pump outlet pressure until it returns to the setting value.The response of electrical servo variable displacement mechanism is very fast,and the adjustment time is within 30 ms.
3.Constant flow variable displacement control
The aim of constant flow variable displacement control is to keep outlet flow of pump be a constant value by regulating the outlet flow according to the difference between pump outlet flow and setting flow of variable displacement mechanism.The traditional constant flow variable displacement mechanism is composed of a constant flow valve and a hydraulic cylinder.By adjusting the preload spring of the control valve,the outlet flow of pump could be regulated to the setting value.
The constant flow variable displacement control of electrical servo variable displacement piston pump is realized in a flow control loop,which is composed of a flow sensor installed in the pump outlet,a DC servo motor and its controller.Therefore,the flow signal could be feedback to the controller of DC servo motor to form a closed loop control.
According to the above-mentioned principles,the constant flow variable displacement control model of electrical servo variable displacement piston pump could be built in AMESim,as shown in Figure 3.The system is a double closed loop control structure,in which the outer loop is flow control to keep flow as a constant;the inner loop is swash plate angle control to adjust the swash plate.The swash plate load acts on the motor output shaft by a torque converter,and the pump output flow can be adjusted by the rotation speed of main drive motor.
By using the model as shown in Figure 3,the constant flow variable displacement control simulation could be carried out.The range of simulation time is 0.3 s,the flow setting value is 10 L/min,the load orifice is full opened,the rotation speed of main drive motor could be changed from 5 000 r/min to 10 000 r/min within 0.15 s,and the simulation results were shown in Figure 4.

Figure 3.Constant flow variable displacement control model
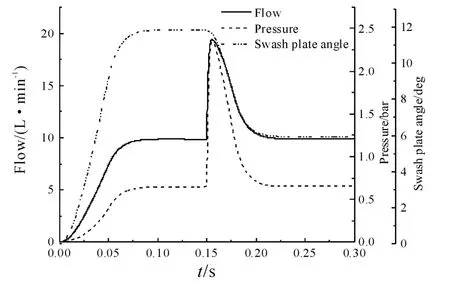
Figure 4.Pressure,flow of pump output and swash plate angle
The pump outlet flow could be rapidly adjusted to maintain constant when the rotation speed of main drive motor gets changed.The pump swash plate angle could be reduced accordingly with the increase of rotation speed of main drive motor in order to decrease the pump outlet flow until it returns to the setting value.The response of electrical servo variable displacement mechanism is fast,and the adjustment time is within 50 ms.
4.Constant power variable displacement control
The constant power variable displacement control is to keep pump outlet power be a constant value,i.e.keep the product of pump outlet flow and pressure be an approximate constant values through regulating outlet flow according to pump outlet pressure.The traditional constant power variable displacement mechanism is composed of a control valve and a hydraulic cylinder by regulating the preload springs of the control valve and limiting the unit to keep pump outlet power almost is a setting value.The characteristic curve is an approximate hyperbolic line.
The constant power variable displacement control of electrical servo variable displacement piston pump could be realized in a power control loop,which is composed of a flow sensor and a pressure sensor both of them installed at the outlet of pump,a DC servo motor and its controller.Therefore,the product of flow and pressure signal could be feedback to the controller of DC servo motor to form a closed loop control.
According to the above-mentioned principles,the constant power variable displacement control model of electrical servo variable displacement piston pump could be built in AMESim,as shown in Figure 5.The system is a double closed loop control structure,in which the outer loop is power control to keep power be a constant;the inner loop is swash plate angle control to complete adjusting of swash plate.The swash plate load acts on the motor outlet shaft by a torque converter,and the load could be adjusted by the opening of the orifice.

Figure 5.Constant power variable displacement control model
By using the model as shown in Figure 5,the constant power variable displacement control simulation could be carried out.The range of simulation time is 0.3 s,the power setting value is 5 kW,the opening of orifice could be changed from20%to 5%within 0.3 s,the rotation speed of main drive motor is 10 000 r/min,and the simulation results are shown in Figure 6 and Figure 7,respectively.
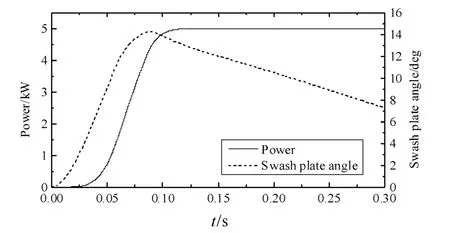
Figure 6.Output power of pump and swash plate angle
As shown in Figure 6,the pump outlet power could be maintained as constant value when the load gets changed.The pump swash plate angle and outlet flow will be decreased according to the increase of load pressure in order to match the outlet power,so as to realize the constant outlet power.
In Figure 7,it has shown that a very good constant power characteristic curve(hyperbolic)could be obtained through the electrical servo variable displacement control.

Figure 7.Pressure-flow characteristic curve of pump
5.Conclusion
The constant pressure variable displacement control,constant flow variable displacement control and constant power variable displacement control of the designed electrical servo variable displacement piston pump were simulated and analyzed based on AMESim.Under the condition of without change of pump variable displacement mechanism,the abovementioned different variable displacements could be realized conveniently.What it needs to do is to control the DC servo motor with different closed loop control method combined with the corresponding pressure and flow sensor signals.Therefore,this kind of pump might have a good prospect of applications in the real industrial engineering.
[1] Li Yulin.Hydraulic Components and System Design[M].Beijing:Beihang University Press,1991:87-96.
[2] Gao Bo,Fu Yongling,Pei Zhongcai.Research of the Servo Pump’s Electrically Driven Variable Displacement Mechanism[C]//Proceedings of the IEEE International Conference on Mechatronics& Automation.Niagara Falls,2005:2130-2133.
[3] Gao Bo,Fu Yongling, Pei Zhongcai, et al. Servo Pump’s Electrically Driven Variable Displacement Mechanism[J].Chinese Journal of Mechanical Engineering,2006,42(3):184-187.
[4] Fu Yongling,Qi Haitao,Lu Yueliang,et al.A Novel Electrical Servo Variable Displacement Hydraulic Pump Used for Integrated Actuator in MEA[C]//Proceedings of the 28th Congress of the International Council of the Aeronautical Sciences.Brisbane,2012:3907-3912.
[5] Qi Haitao,Fu Yongling,Lang Yan.Modelling and Simulation of Electrical Servo Variable Displacement Piston Pump Based on AMESim[J].Machine Tool& Hydraulics,2015,Accepted.
[6] Fu Yongling,Qi Haitao.LMS Imagine.Lab AMESim System Modeling and Simulation Tutorial[M].Beijing:Beihang University Press,2011.
