基于RTK/VRS技术的车辆智能监控管理平台的设计与实现
2014-08-22周文胜王伟权高云志
邹 浜,周文胜,王伟权,高云志,张 良
(四川九洲电器集团有限责任公司,四川 绵阳 621000)
0 引 言
在国家提倡构建“智慧城市”的时代背景下,“智能交通”作为“智慧城市”的重要组成部分,迅速成为相关领域的研究热点。城市化进程的快速推进导致了各省市城内、城乡和城际道路的大规模修建,机动车的平民化普及使得车流量迅速提高,由此导致了多城市多路段,尤其是城市主干道和高速公路的交通拥堵现象和交通事故时有发生,对我国的经济发展和国民人身安全造成严重威胁[1]。因此,符合当今时代需求的实时、高效、和智能化的车辆智能监控管理平台应运而生。
网络实时动态定位技术(RTK)是一种集卫星大地测量技术、通信技术和计算机网络技术于一体的空间信息实时服务技术[2],借助国家建立的大规模CORS网络,可以快速、实时和准确地向授权用户提供导航定位、测速和授时等服务。将网络RTK技术应用于车辆智能监控管理平台中可以为授权用户提供以下服务:1)对指定路段进行车流量监控,实时反馈车辆详细信息;2)对所有的车辆进行实时定位,对越界、频繁变道和长期违章占道的车辆进行警告和处理;3)通过对车速和行驶方向进行监控,对超速和违章行驶的车辆进行警告与处理;4)对发生故障的车辆进行跟踪锁定,并通过调度系统对其实施有效救援;5)在道路发生突发状况(如公路堵塞、泥石流冲断公路)时,引导车辆在最佳行车路线上行驶[3];6)和高精度城市三维立体影像进行融合,实现高精度城市三维导航[4-7]。
课题组研制了基于网络RTK技术的成绵高速公路车辆智能监控管理平台,目前在四川成绵高速公路上进行了试运行,取得了良好的效果。
1 网络RTK的相关技术及其优势
1.1 传统导航定位技术的不足
传统的车辆监控平台基本上都采用GPS单点定位技术[8-9]对车辆进行定位和跟踪,而GPS单点定位由于是伪距绝对定位,因此定位误差均为米级,在对空条件差的地区甚至能达到±10 m以上的误差,这将导致在道路重叠区(如立交桥)出现定位错区,给监控和管理带来不良影响,而且由于定位误差较大,目前已经难以满足智能交警、高精度城市三维导航等新应用的要求。
传统的RTK技术虽然在一定程度上能为需要进行高精度(厘米级误差)动态定位的用户提供良好的服务,但在实际运用中仍然存在以下不足[1]:1)可靠性低,由于流动站只能接收单一基准站的差分改正值,一旦基准站发生故障,则会导致流动站定位错误甚至不能定位;2)覆盖范围小,由于流动站需要通过基准站进行差分改正,随着流动站与基准站间的距离逐步增大,空间相关误差(如电离层延迟、对流层延迟和星历误差等)也会逐步增大,甚至会导致流动站与基准站的空间误差失相关,因此流动站只能在基准站附近10~15 km的距离内进行定位;3)通信链路不畅,由于基准站上装载的多为小功率无线电台,难以向远距离的流动站发送差分信息。
显然,传统的导航技术限制了它在新时代交通运输领域中的使用,因此需要运用作用范围广、高可靠性和通讯链路畅通稳定的网络RTK技术。
1.2 VRS技术的定位方法及优势
随着北斗导航系统(BDS)的快速发展,GPS/BDS双模定位可以在一定程度上改善GPS单模定位时卫星数量少和定位精度不高的缺点,因此被应用于网络RTK中。网络RTK中目前使用较为广泛的是虚拟参考站(VRS)技术[10],其主要硬件构成包括主控中心、CORS网络和若干流动站,其定位方法大致如下:在需要进行定位的区域按照一定的位置规律布设若干CORS站(基准站),各CORS站以光纤连接共同组成CORS网络,对视野内的卫星进行连续实时观测,借助通信网络将观测值实时上传到主控中心;流动站进行定位时先获取自身概略坐标,通过GSM/GPRS/CDMA将概略坐标发送至主控中心;主控中心对所有基准站数据源进行实时采集,对数据进行分布式处理与融合再处理,根据流动站提供的概略坐标在其位置上产生一个物理上并不存在的虚拟参考站,并生成包含对流层延迟修正值和电离层延迟修正值等信息的VRS观测值或RTCM差分改正数,再以无线通信的方式实时提供给用户,供其进行常规差分解算,最终得到用户需要的精确坐标(平面坐标误差一般为厘米级定位精度)。上述基于VRS技术的网络RTK系统称VRS系统,VRS系统应用于公路交通运输导航中,需要将CORS站布设于能完全覆盖公路段的区域中,将流动站改装为车载接收机,主控中心和车载接收机均需要双向数据传输,用户的数量不能无限增加,主要取决于网络带宽和主控中心服务器的荷载承受能力。车辆智能监控管理平台中VRS系统的组成结构如图1所示。
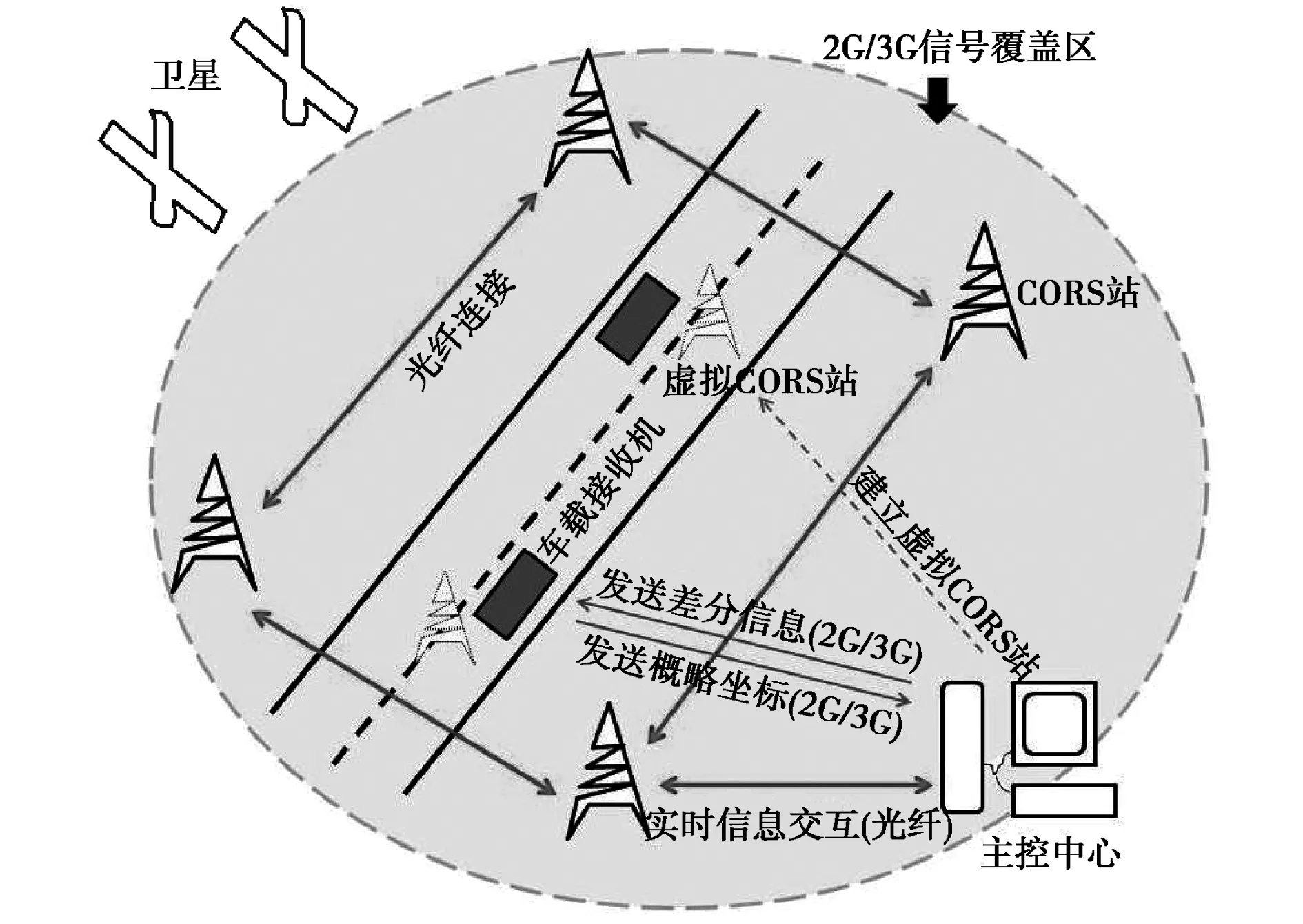
图1 车辆智能监控管理平台中VRS系统的组成结构
VRS有以下优势[10]:1)定位精度高,且具有较好的均匀性;2)更高的可靠性和可用性,如果某个CORS站发生故障,系统还可以通过剩余的CORS站估计空间相关误差,继续为用户提供服务,系统还可以根据冗余信息有效探测某个基准站的观测粗差,提高RTK的可靠性和完好性;3)更大的作用范围,只要在CORS网和GSM/GPRS/CDMA网信号覆盖的范围内,均可以进行有效定位;4)通畅的数据链路,由于GSM/GPRS/CDMA网的信号覆盖范围广,且具有足够的数据带宽,完全可以作为通信数据链的载体;5)用户接收机只承担少部分的计算,大部分的计算由主控中心承担,因此可适当减少用户接收机的制造成本。
2 成绵高速公路车辆智能监控平台的构建
2.1 用户需求分析
成绵高速公路起于成都市三合场,止于绵阳磨家,全长92.4 km,是路基宽度约为24 m,设计行车速度为120 km/h的全封闭、全立交、四车道的高速公路。经综合考虑,沿线布设3台CORS站,各CORS站与主控中心以光纤相连形成局域专网。
在用户需求方面,由于成绵高速公路为事故多发地段,尤其在节假日,经常会出现交通拥堵、车辆违章和车辆追尾等现象。因此,该平台需要实现网络RTK技术在车辆监控管理方面的实用化,平台主要分为本地监控管理端和被监控终端。本地监控管理终端应具有的功能:1)能够根据用户权限维护对被监控车辆运行情况进行查询和统计;2)能够对被监控车辆进行实时定位,对越界、频繁变道、超速和长期违章占道的车辆进行警告和处理;3)能在发生突发状况时,引导车辆在最佳行车路线上行驶;4)能够快速处理被监控端发送的救援请求等信息;5)能够与电子地图进行融合,将各车辆位置以及道路周边环境展现在电子地图上,并支持在地图上直接点击查询被监控车辆的属性以及运行情况(如历史行车轨迹)等信息;6)提供平台运营维护、信息管理和后台用户权限管理等功能。
被监控端应具有以下功能:1)显示本车相关的属性信息;2)能够进行厘米级精度(要求能精确区分车道)定位的实时导航;3)能够向本地监控管理端实时发送请求信息,并能实时处理本地监控管理端发送而来的警告、违章处理和请求应答等信息;4)能在电子地图上显示本车的历史行车轨迹。
因此,这是一个融合了网络RTK技术、GIS技术、计算机技术和无线通信技术等先进技术的创新性车辆智能监控管理平台。
2.2 平台整体结构设计
平台的硬件部分分为本地监控管理端和被监控端,其硬件构成和总体网络结构设计如图2所示,本地监控管理端由服务器群、浏览器工作站和CORS站通过移动公网和局域专网连接而成,移动公网和专网之间设置防火墙,防止病毒和木马入侵,对设备和系统造成损坏。服务器群包括主控中心服务器、数据库服务器和应用服务器。浏览器工作站指的是使用带视频输出的浏览器通过互联网连接到服务器的PC电脑,采用流行的浏览器/服务器(B/S)结构,能对被监控端的的相关信息进行显示、查询、管理和请求处理等操作。被监控端则是各个车载终端通过网络拓补的方式进行连接。

图2 平台硬件构成和总体网络结构设计示意图
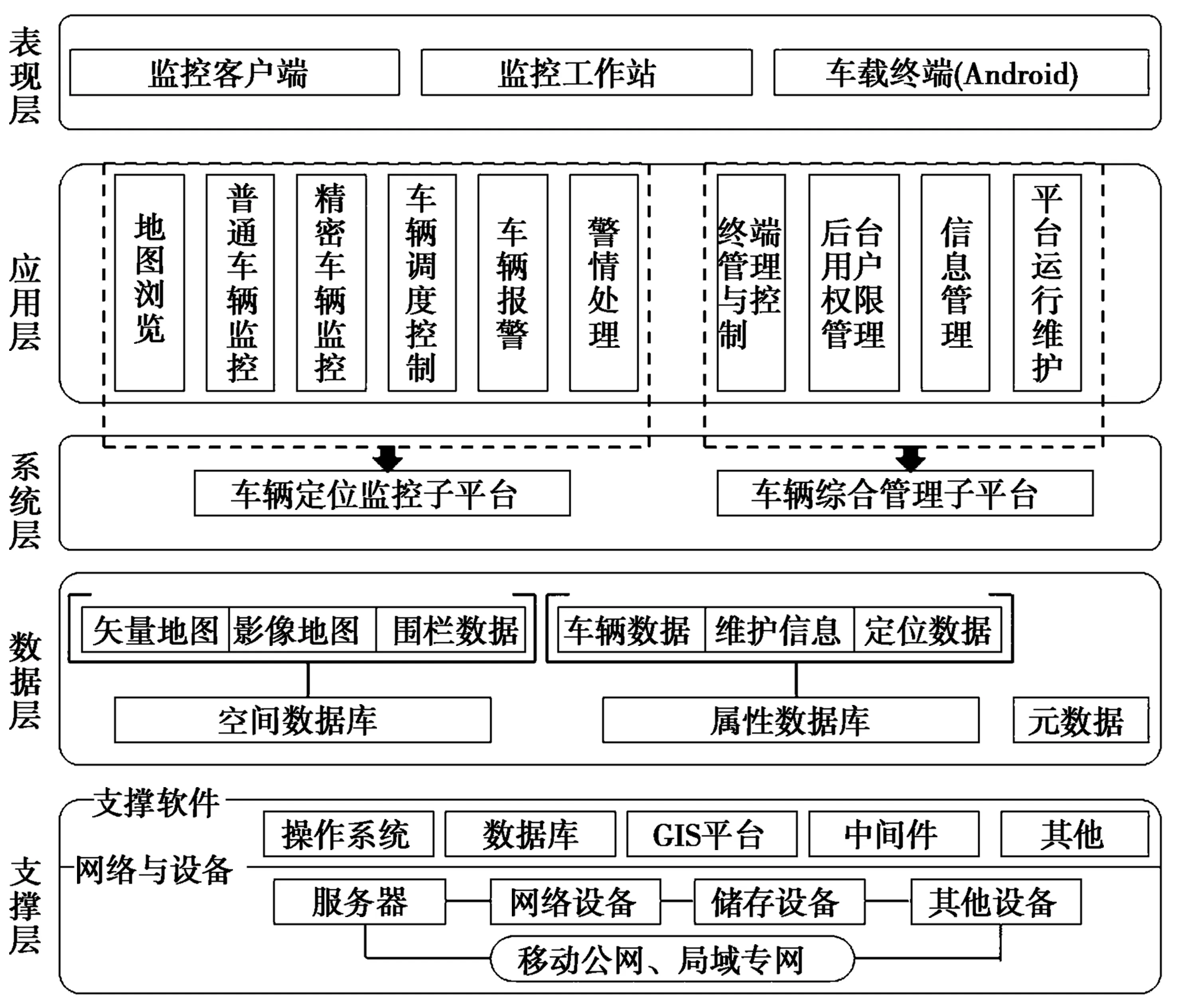
图3 平台总体的技术架构设计示意图
平台总体的技术架构设计如图3所示,分为支撑层、数据层、系统层、应用层和表现层共五层架构。
支撑层包括成绵高速公路车辆智能监控平台运行的硬件网络环境和软件运行环境。硬件网络环境包括GPRS通信网络、互联网、服务器、存储设备和导航定位设备等硬件的运行环境;软件运行环境包括服务器操作系统、数据库软件和GIS平台软件(Super Map)等软件的运行环境。
数据层包括数据层中的数据包括空间数据和业务专题数据两大类数据。空间数据包括基本的地形图矢量数据、围栏数据、道路界线数据、影像数据、DEM数据以及三维场景数据;业务专题数据中包括车辆基本属性信息数据、系统维护信息数据、车辆告警信息数据、车辆警情处理数据以及车辆位置信息数据等业务数据;元数据信息主要用于管理与描述整体系统数据分类、数据结构等相关信息,并且能够用于维护系统数据库。
系统层包括车辆定位监控子平台和车辆综合管理子平台两大子平台。车辆定位监控子平台主要用于车辆位置监控和告警监控,在这个子平台上,实现了基础地图展现模块、车辆实时位置展现模块、车辆告警模块和警情处理模块,这些模块综合了整套基于网络RTK技术的车辆监控业务流程;车辆综合管理子平台是整个平台的基础数据维护以及服务器监控服务中心,主要用于进行车辆监控基础数据的管理和维护,以及对服务器进行运行维护监控。
应用层就是基于系统层的功能模块,集成了地图展现浏览模块、高精度车辆监控模块、车辆调度控制模块、车辆报警模块、警情处理模块、终端管理与控制模块、系统管理模块、信息维护模块和平台运维模块等功能模块。
表现层是整个成绵高速公路车辆智能监控管理平台所支持的几个表现形式,根据业务需求,平台不仅需要在传统PC机上运行,可以让用户在监控指挥中心对车辆进行实时监控以及警情处理,而且还需要向被监控用户提供基于Android设备的APP应用,该APP集成了信息维护、监控和遇紧急情况时告警信息上报等功能。
2.3 平台整体服务流程与功能实现
由于高速公路上的交通事故75%以上均由于货运车造成,因此政府规定对进入成绵高速公路的货运车实行强制监控,平台的服务流程和实现的功能为
1)货车在进入成绵高速公路前,用户应首先通过客户端登陆平台服务器进行注册,录入车主信息和车辆属性信息,成为平台认定的授权用户。
2)当货车进入成绵高速公路时,会被安装车载终端,用户进行登录后会通过移动公网与平台服务器进行自动连接,以便能实时接收主控中心发送的差分信息用以实时进行高精度定位、导航与测速,以及接收服务器发播的其他信息。车载终端显示器可以在电子地图上显示本车的行车轨迹和相关属性信息,而本地监控工作站的显示器上会显示该授权车辆的相关属性信息、位置以及行车状态等信息,也可选择性地显示该车的历史行车轨迹。
3)当货车靠近围栏或界线(一般为≤0.5 m,也可自行设定)、接近限制速度(差值≤5 km/h,也可自行设定)、长期占用超车道和频繁变道时,平台服务器会自动向用户发送告警信息。
4)当货车出现进围栏、越界和超速等违章情况时,平台服务器会对该车辆进行标记,工作人员可以实时在监控客户端填写违章处理意见,并向用户进行实时发送,也可延后综合处理,并将处理意见发送给相关交通管理部门。
5)当货车遇险时,可通过车载终端向平台服务器发送警情请求,服务器接收到请求后会将其显示在平台监控显示器上,监控工作人员可根据具体险情对遇险车辆进行救援、调度和处理意见发送等操作。
6)当出现道路损坏、交通拥堵或车辆追尾等事故时,平台服务器会向后续车辆发送事故预警信息,必要时还可发送最佳路线导航指令,供用户进行参考,合理规避事故风险。
7)当货车驶出成绵高速公路时,则脱离平台监控范围,车载终端被回收,平台数据中心将会根据工作人员的设置自动对该车辆的历史数据进行保存或删除等操作。
此外,平台还提供很多外部接口,便于对平台进行对象和功能方面的扩展和更新。
3 结束语
成绵高速公路车辆智能监控管理平台经过一段时间的试运行,可以得出以下结论:
1)将RTK/VRS技术应用于车辆导航中,能达到厘米级定位精度,配合高分辨率电子地图,能对越界、频繁变道、超速和长期违章占道的车辆进行精确定位、监控和处理,即实现真正的车道级监控,这是传统导航技术所做不到的。
2)将网络RTK技术与高精度三维实景地图进行融合,实现了真正意义上的三维实景导航,符合目前智能交通的新需求。
3)成绵高速公路车辆智能监控管理平台综合运用了多项高新技术,能对车辆进行智能化的定位、监控和管理,有效减少交通事故发生率。经初步测算,平台试运行期间,事故发生率相比同期减少约30%,为政府节省费用400余万,因此,具有一定的创新性和实用性。
[1]吴建洪. 车载导航系统的研究与实现[D]. 长沙:湖南大学,2007.
[2]徐 斌. 车辆导航系统定位技术的研究[D]. 长春:吉林大学,2007.
[3]王冬军. 使用GPS卫星导航仪进行线路选线的方法探讨[J]. 河南测绘,2007(2):14-15.
[4]许志海,张昭云,陈应东. 车辆导航系统中定位数据处理和地图匹配技术[J]. 测绘学院学报,2003,20 (4):247-250.
[5]吴自银. 一种基于电子地图的GPS导航定位技术[J]. 海洋通报,2001,20 (3):65-71.
[6]刘 颖. 基于GIS技术的GPS车载导航定位方法研究[J]. 科技信息·学术研究,2008(10):104-109.
[7]樊锦明. 基于GIS的车载导航技术研究[D]. 哈尔滨:哈尔滨工业大学,2011.
[8]吴 峰. GPS精密单点定位导航方法研究[D]. 广汉:中国民用航空飞行学院,2009.
[9]陈 宇. 差分GPS系统及DGPS/电子地图导航定位系统设计和开发[D]. 哈尔滨:哈尔滨工程大学,2000.
[10]黄丁发. GPS卫星导航定位技术与方法[M]. 北京:科学出版社,2009.