基于不同差分模式下手持式GPS平面定位精度的分析
2014-08-21葛小三李春意
郭 敏,葛小三,李春意
(河南理工大学测绘与国土信息工程学院,河南 焦作 454003)
0 引 言
手持GPS在测量工作中很有优越性,但是在高精度要求的测量工作中还是有所欠缺,手持GPS在不同的测量模式下精度也有所不同,但最高精度也只能达到亚米级[1-3]。所以,如何将手持GPS测量精度提高并应用到高精度的测量工作中去?即如何提高手持GPS定位精度及工作效率是目前测绘工作者研究的热点。本文从不同的定位模式着手,分析如何提高手持GPS的定位精度。
1 实 例
1.1 试验区概况及试验条件
河南理工大学地势比较平坦,控制点周围有少许水源,校区内教学楼和办公楼的外围有很多已知点,这些控制点精度可以达到毫米级,控制点周围有少许水源,实验区能满足测量要求。测绘工程实验室拥有Trimble Geoxt 2005手持式GPS接收机、控制点分布图及控制点坐标、GPS pathfinder office 后处理软件。
1.2 试验方案设计
包括两种数据采集模式前的准备工作,其中坐标转换是一项非常重要的工作。
手持GPS单点定位得到是WGS-84坐标,而用户需要的是地方坐标,这就关系到坐标的转换问题[1,3]。Trimble geoxt 2005 手持式GPS坐标转换需要后处理软件GPS pathfinder office软件。
1)建立坐标系统:打开GPS pathfinder office软件,选择坐标系统管理器,如图1所示;进入坐标系统管理器,单击编辑-增加椭球;输入定义坐标系统的名称“beijing54”、地球的长半轴“6378245 m”、扁率“298.3”;增加基准转换/Molodensky,编辑“基准转换参数”;点击“编辑”进入增加坐标系统组,名称输入“beijing54”,点击确定,点击“编辑”-“增加坐标系统”选择投影方式:“横轴墨卡托投影”,添加坐标系统,选择新建的坐标系统名称“beijing54”,再确认。在投影带参数名称中,可以采用投影带中央子午线数值命名。

图1 GPS pathfinder office界面
2)联测高精度已知点:为求得高精度的地方坐标,根据具体情况联测已知点,确保已知点精度高且在实验区周围尽量均匀分布。对于手持GPS Trimble Geoxt来说,则需要借助GPS Pathfinder Office 软件完成。在GPS Pathfinder Office 中选择-坐标系统,打开重新采集已知点时创建的数据文件,选择“选项”中“建立局域点”,如图2所示,将测量点与已知点坐标添加完毕后进行解算,参差小于1 m,则证明校正成功。注意并不是把所有的已知点都加上,只要能很好地控制试验区的范围就可以,所以选择的点尽量在试验区周围,形成控制网的形式,以便提高地方坐标的精度。

图2 创建点向量
点击“创建点”属于要表示的点名,点击“创建并应用”,这时的坐标系统就转换为以点的方式体现当地的局域点。打开“坐标系统管理器”,输出到手持GPS里面,在坐标系统里选择“点”,这时在野外采集的所有点要素在现场随时都可以表示为当地坐标。
1.3 实时差分模式采集数据
实时差分是一种广域差分技术,目的就是为了实时获得差分卫星所发出的实时改正数据,以得到更高的精度。用手持GPS进行数据采集,采集模式选择“实时设置”,坐标系统设置为建立的beijing54,高度参考设置为平均海水面,等待改正卫星信号的获得。新建文件并打开,在此输入相关参数同时要选择相关要素,进行数据采集,如图3所示,将采集的数据输入到电脑中,最后导入到“GPS Pathfinder Office”软件中进行处理。
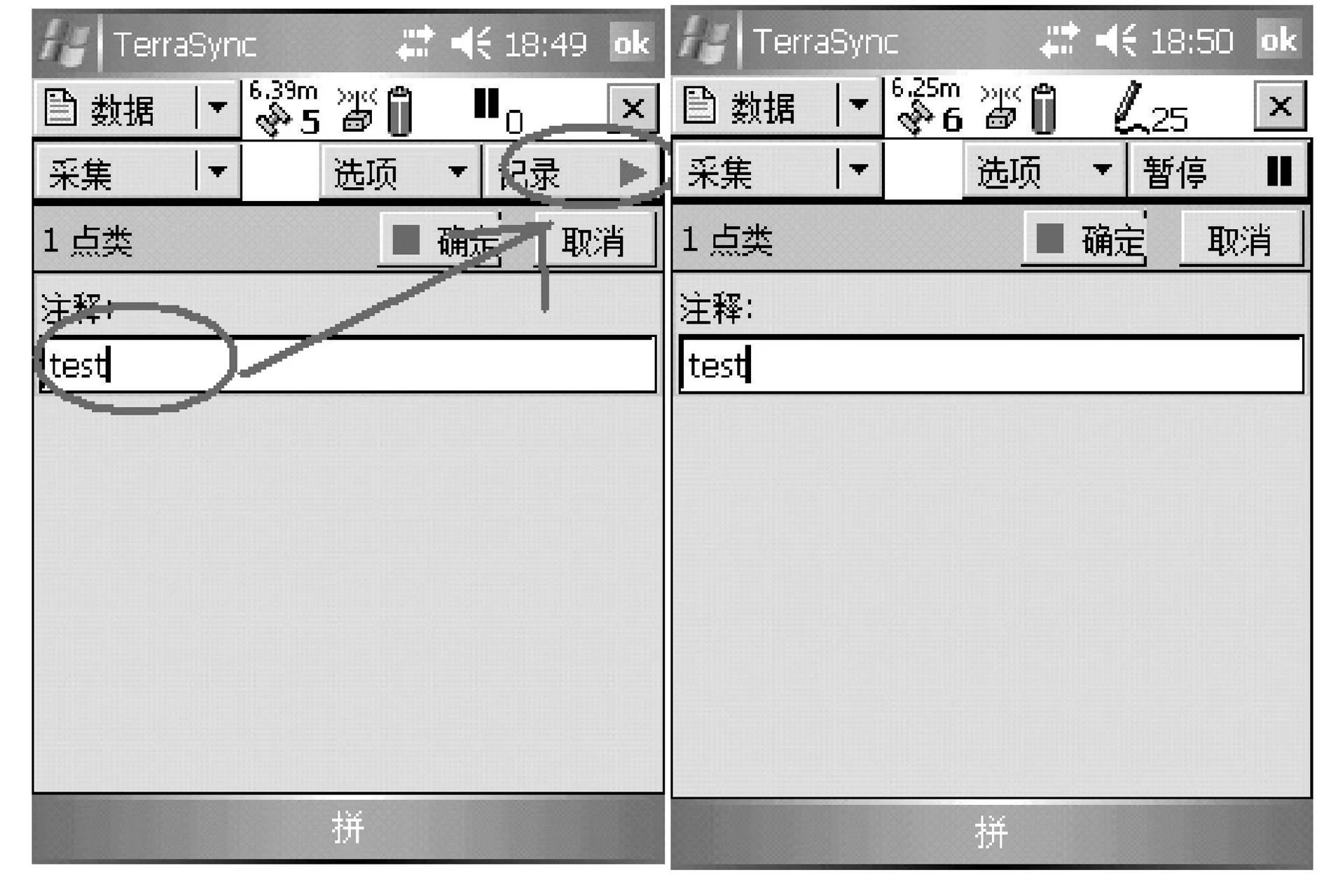
图3 数据采集
1.4 实时差分模式数据处理
分别对这四个点进行30 s和60 s的观测,两次实测值及坐标差值如表1所示。选取实验区内已知点0601:x=3 895 500.928 m,y=431 931.921 m; 0602:x=3 895 636.017 m,y=431 912.086 m;K01:x=3 895 703.823 my=431 937.392 m; 0607:x=3 895 725.023 m,y=432 014.709 m;其中0607点在树荫下。
由表1可见,观测时长对手持GPS精度是有所影响的,连续观测30 s点位误差可以达到2 m左右,而观测60 s点位误差在1 m左右,有些点位可以达到亚米级。这说明多次观测取平均值可以减小误差。其中0607号点距离教学楼和树木较近,点位误差达到5 m左右,所以楼房树木对GPS信号的影响比较大,精度会大大降低。由此可见手持GPS在信号比较好(不受遮挡)的情况下,完全能满足小比例尺测图的要求。

表1 观测时长对手持GPS实时差分精度的影响
1.5 后差分改正数据采集模式
此模式所需两台Geoxt手持GPS接收机,一台手持GPS接收机做静态观测,接收时间不少于 30 min,首先做基准站的Geoxt手持GPS接收机开机,新建文件夹的时候文件类型要设置为“基准站”,输入已知点的坐标,固定不动进行数据记录[2]。接着另一部手持机开机和以上叙述的数据采集步骤一样,记录时间间隔设置为1 s,连续跟踪时;要保证不少于 5 颗卫星并且不发生卫星失锁的现象;否则导致GPS Pathfinder Office 中进行数据的差分改正出现问题,无法生成基准站数据。野外基准站和流动站数据采集结束后;需要在室内完成内业数据处理。需要注意:数据采集完之后首先关闭流动站,再关闭基准站,保证基准站文件时间完全覆盖流动站时间。基准站记录时间间隔要与流动站一样。手持机数据利用 GPS pathfinder office软件中的数据传输功能把数据导入到计算机中。在 GPS pathfinder office中选择功能“差分改正”,分别添加流动站文件和基准站数据文件,选择“载波和代码处理”进行差分数据改正。
1.6 后差分处理精度分析
将没有差分改正前的数据精度和差分改正后的数据进行对比,可以发现差分改正后数据不管是水平位置精度还是垂直位置精度都有很大的提高[4-6]。数据差分改正之前,精度一般在2~3 m间变化,而进行差分数据改正之后,数据精度一般在0.5 m左右,提高了手持GPS精度,如表2所示。

表2 后差分处理有精度分析
由表2得知在基准站与流动站距离足够近的情况下,利用差分GPS定位技术大大消除了相关的误差,例如星钟误差和星历误差、电离层延迟和对流层延迟误差。0607号点受树遮挡,定位精度不太高,其它定位点的精度比实时采集模式下都大大提高,如果选择的点不受多路径误差影响或影响较少,定位精度一般会在0.5m内。0602号点就是校区东西大道上,离水面、大树及大楼等比较远,该点的定位精度比较高。
2 结束语
以河南理工大学已知点为依据,对手持GPS数据采集模式和方法进行了探讨,得出不同的环境条件、不同的模式,定位精度差别很大,只要把握好精度的要求,手持GPS在1∶50000或更小比例尺测图中会发挥更大的作用。
[1]邓 勇, 张正禄,黄江雄,等.工程测量中的坐标转换相关问题探[J].测绘科学,2011,36(5):28-30.
[2]高建东,雷郁文.利用后差分技术提高手持GPS的定位精度[J].探物与探化,2006.30(5):447-448.
[3]张 兵.手持GPS在小范围内坐标转换参数计算及应用[J].内蒙古石油化工,2009(8):86-87.
[4]谢峰珠,薛永安,郭卫民.Trimble Geo RTK 手持GPS定位精度分析与应用研究[J].矿山测量,2012(1):12-14,17.
[5]王 剑.手持GPS差分测量误差分析及应用[J].水利采煤与管道运输,2012(1):87-88.
[6]李克晓,李凤友,刘焕玲,等.手持GPS定位精度与误差的研究[J].全球定位系统,2011,36(6):83-86,91.