Mecanum轮全方位移动机器人技术及其应用
2014-08-16王兴松
王兴松
(东南大学 机械工程学院,江苏 南京 210096)
1 全方位移动的定义及常见形式
全方位移动机器人是在平面内具有前后移动、左右移动和原地回转三个独立运动自由度的移动机器人。由于其具有原地零半径回转和横移的特点,非常适合在狭小空间或对机器人的机动性要求高的场合[1]。另外,在需要精确定位或跟踪复杂路径时,利用其可以原地回转的特点,全方位移动机器人能适合更为复杂、紧凑的工作环境[2]。
目前国内外很多机构展开了全方位移动机器人的研制工作[3-4],在机器人车轮的设计制造、机器人上车轮的轮子配置方案、以及机器人的运动分析和路径规划等方面,进行了广泛的研究,形成了具有不同特色的全方位移动机器人,较为常见有三种[5]:麦克纳姆轮式全方位移动机器人、全轮偏转式全方位移动机器人和caster轮式全方位移动机器人,见图1(a)-(c)[6-7]。
其中,基于Mecanum轮的全方位移动机器人具有整车机械结构简洁、运动控制灵活、通过性好等优点,近年来得到更为广泛的应用[8-9]。
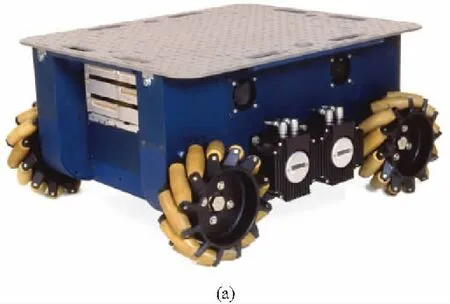


图1 常见的三种全方位移动机器人结构
2 Mecanum轮全方位移动的原理
麦克纳姆轮(Mecanum Wheel)是一种全方位移动车轮,1973年由瑞士人Bengt Lion发明[10],该轮的特点是在传统车轮的基础上,在轮缘上再沿与轴线成α角方向安装若干可以自由旋转的小辊子,这样在车轮滚动时,小辊子就会产生侧向运动。通过麦克纳姆轮的组合使用和各车轮转动方向和速度的协调控制,可以使车体得到运动平面内的任意方向移动和转动。
通常来说一个麦克纳姆轮含有多个辊子,并按照一定的要求装配而成,均匀地排列在轮毂的周围,由于其外观上与斜齿轮相似,麦克纳姆轮也有齿轮啮合时相类似的问题:为了保证运动的平稳性,当前一个辊子与地面即将分离时,后一个辊子必须与地面接触。
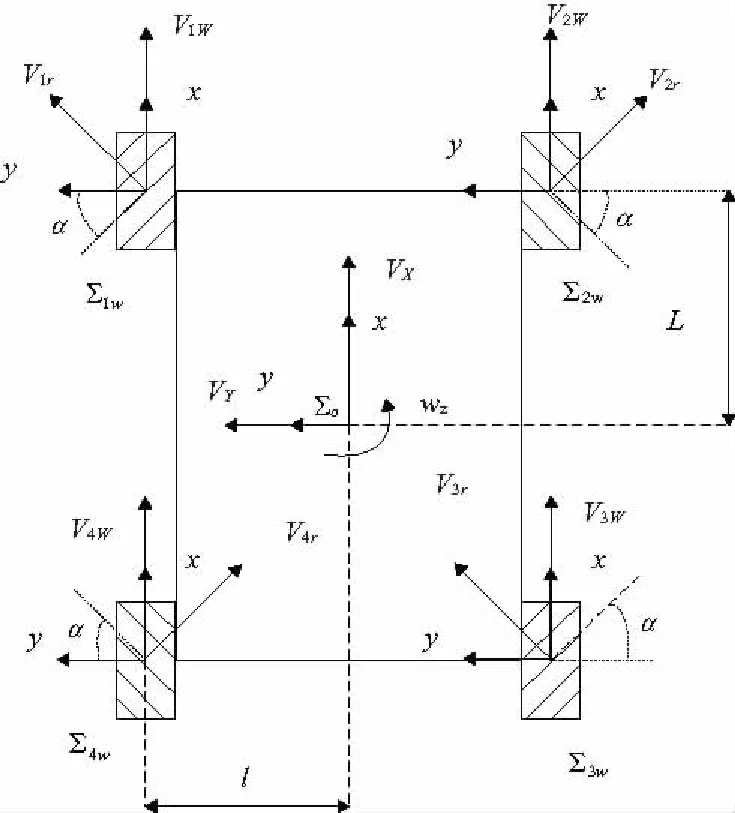
图2 麦克纳姆轮式全方位移动机器人运动学分析示意图

根据Mecanum轮机器人运动学分析结果,在已知机器人x方向移动的速度vx、y方向移动的速度vy,以及绕中心点O垂直轴转动角速度ωz时,四个车轮的线速度Vi(i=1,2,3,4)可分别由以下各式计算:
V1=vx-vytanα-(Ltanα+l)ωz
(1)
V2=vx+vytanα+(Ltanα+l)ωz
(2)
V3=vx-vytanα+(Ltanα+l)ωz
(3)
V4=vx+vytanα-(Ltanα+l)ωz
(4)
同样,在已知四个轮子转速的情况下,也可以用过这四个轮子的转速获得麦克纳姆轮全方位移动机器人在坐标系∑0中的运动速度:
(5)
(6)
(7)
由式(1)-(4),对前后移动、左右移动、原地旋转、斜向移动等典型移动情况,可计算出的各车轮的转动方向和速度,将这些计算结果集中表示,即可获得常见的Mecanum全方位移动情况的车轮转向关系(图3)。

图3 常见机器人全方位移动与车轮的转动关系
3 Mecanum轮全方位移动技术的关键技术
3.1 Mecanum轮的设计理论
辊子轮廓设计是Mecanum轮全向移动机器人平稳运行的关键,要综合考虑轮子的运动连续性和辊子接地重合度、轮轴高度一致性和平稳性、辊子轴的支承强度等。
Mecanum轮的结构设计,最重要的是轮毂和小辊子外轮廓线的设计。图4为Mecanum轮的正视图和侧视图。从图中可以看出,小辊子的外轮廓面在一个圆柱体的圆柱面上,这是运动过程中车体平稳的要求。

图4 两端支撑形式的Mecanum轮正视图和侧视图

γ·R=B
(8)
辊子的外轮廓线并不是图中所示的整段的等速螺旋线AA',而是取螺旋线中间的一段,例如图5中的DE段。
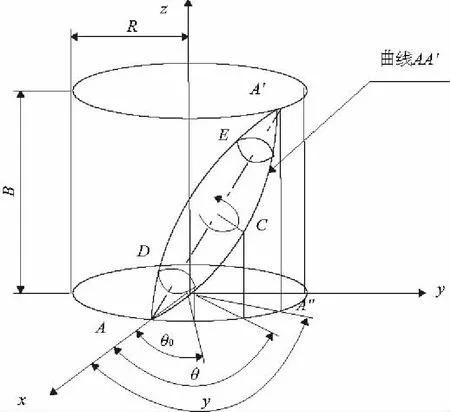
图5 辊子外轮廓线生成图
目前,Mecanum轮常用的有两端支撑结构(图6a)和中间支撑结构,中间支撑又分为中间单支撑(图6b)和中间双支撑(图6c)。两端支撑优点是受力状态比较好,运动平稳,同样的承载下,车轮尺寸比中间支撑小,适合于大型承重车辆;缺点是结构复杂,对地面的要求比较高,如果地面高低不平,轮毂容易与地面接触。中间支撑的优点是结构相对简单,对地面要求低,车辆通过性好;但轮毂和辊子的受力状态不好,车轮尺寸相对较大。

图6 Mecanum轮常见的支撑结构[11]
3.2 轮毂的精密加工技术
轮毂采用一体化设计,最重要的参数有:轮毂的宽度W,轮毂上安装辊子的孔的位置。这2个参数在Mecanum车轮计算过程中已经得到。
由Mecanum轮的结构可知,不论采用哪种支撑结构,轮毂上用于安装辊子轴的支撑孔,既要保证沿圆周的均匀分布精度,又要保证其孔的倾斜角度精度以及与辊子轴轴承的配合精度。图7和图8分别是两端支撑和中间单支撑两种支撑结构的典型轮毂结构,由此可见其加工难度。

图7 两端支撑Mecanum轮轮毂
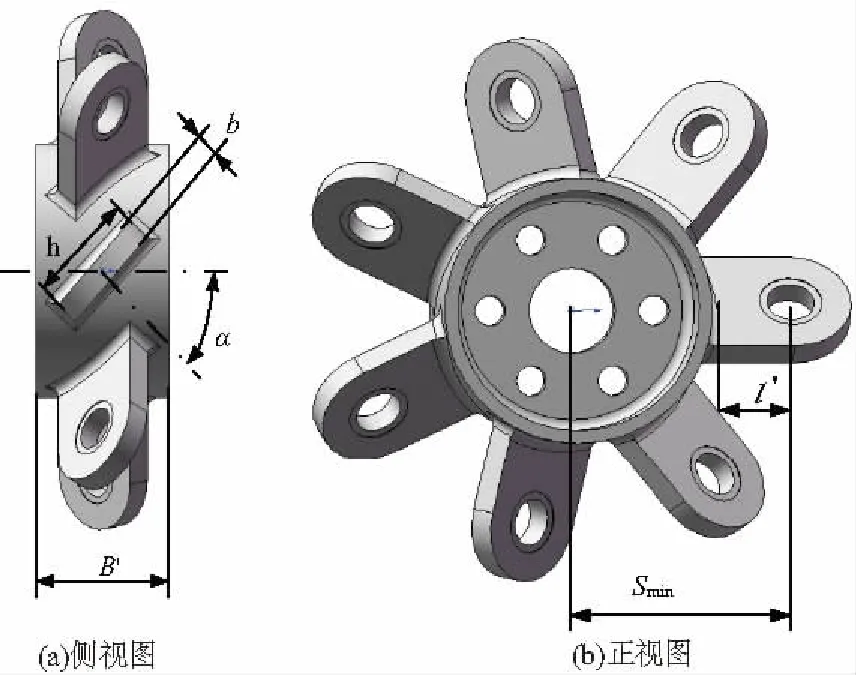
图8 中间单支撑Mecanum轮轮毂
目前,可以采用高精度五轴联动数控机床加工,也可采用普通数控机床加精密分度头和专用夹具加工,加工成本都比较高。
Mecanum轮辊子轴线与轮毂轴线的夹角α对于理论分析和设计加工都是一个重要参数,理论研究中常采用α=45°。实际上,α角是根据电机及负载的尺寸通过几何参数方程的计算获得。由于加工、装配的误差,α的真实值与理论值常存在一定的偏差,该偏差会对机器人的速度及运动轨迹产生一定的影响。
3.3 精确运动控制
现阶段全方位移动机器人的应用主要是在将全向移动机器人作为一个移动平台,通过平台上的其他小位移机构执行相应功能动作,如与机械臂组成的可移动加工、装配移动机械臂。欲使移动机器人系统移动一微小位移,一般做法是通过全方位移动平台上的小位移机构来实现。如适用于飞机起落架的就位仪、导弹的挂弹车,就是通过在全向移动平台上搭载的各种执行机构和驱动系统来进行小位移的移动以实现起落架的对接、拆卸,导弹的挂载等。但这没有完全发挥出全向移动机器人运动灵活的特点。若可以实现整个全方位移动机器人平台的精确运动控制,实现小位移精密定位,则可简化整车结构,降低成本。
由其逆运动学方程可知,Mecanum轮式全向移动机器人的整体运动是由其结构参数和四个车轮的速度控制的。而车轮安装的位置精度、车轮惯性、地面不平、辊子包胶的变形、以及各个电机输出的实际转速与控制输入量之间关系的不一致性,这些影响因素导致移动机器人车体运动的实际速度与理论转速不一致,限制了机器人整车运动精度的提高。Mecanum轮式全向移动机器人的结构参数精度和四个车轮速度的控制精度对整车的运动精度极为重要。除此之外,要实现机器人的精确运动,还必须建立合理的辊子变形模型,以及辊子与地面摩擦模型,在车轮速度控制算法中合理控制这类不确定误差,提高Mecanum轮实际转速的控制精度。
3.4 循迹控制与路径规划
由于全向移动机器人能够原地横移、原地自转,它非常适合在工作环境空间狭窄、对机器人的机动性要求高的场合。由于这些场合通常不适合操作人员进入操作,因此全向移动机器人拥有自动导引和轨迹跟踪的功能是迫切需求。研究全向移动机器人的轨迹跟踪,一方面要求通过控制算法使得全向移动机器人有精确的循迹和轨迹修正的功能;另一方面需要结合全向移动机器人的运动特性和结构特性,寻求各运动参数、几何尺寸参数与跟踪轨迹的特征参数的内在联系,使得全向移动机器人的循迹效率更高、精度更准。
在实际应用中,机器人所循迹的路径或轨迹要根据工作需求和环境特点设计。路径规划的目的则是根据环境、应用场合、实现目标的不同,在工作环境中优化设计出一条遍历所有需要停靠的工作点、并且满足全向移动机器人运动约束条件的轨迹。根据工作任务需要,以最快速度、最节约电能、最短路径等为目标,规划出理想的运行路径,可进一步提高全向移动机器人的运行效率,满足复杂的工作环境中的自动化搬运与物流应用的各种需求。
4 Mecanum轮全方位移动技术的典型应用
4.1 灵巧搬运
麦克纳姆轮式全方位移动机器人国外成功的应用例子有美国Airtrax公司的Mp2搬运车、Sidewinder叉车,德国MIAG公司的飞机引擎就位车、运弹车,德国KUKA公司为空客生产的飞机机身搬运车等产品,图9—图13[12-14]。
此外,德国KUKA公司的youBot机器人搭载有五自由度机械臂和二自由度的机械臂,可以完成机械加工工件复杂转运安装(图14)。

图9 Airtrax Mp2系列搬运车

图10 Airtrax全向叉车ATX-3000

图11 MIAG公司的飞机引擎就位仪
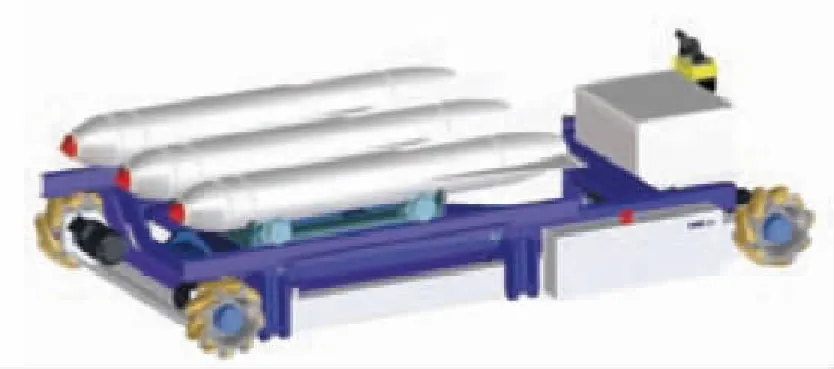
图12 德国MIAG公司生产的弹体搬运装载车

图13 空客公司的机身搬运用Mecanum轮车

图14 德国KUKA公司youBot移动机械臂
4.2 教育与医疗服务机器人
在教育和医疗领域, Mecanum轮用于全向移动轮椅,可以帮助残疾人提高移动能力(图15—图17)[16]。

图15 全方位移动轮椅

图16 全方位移动残疾人车
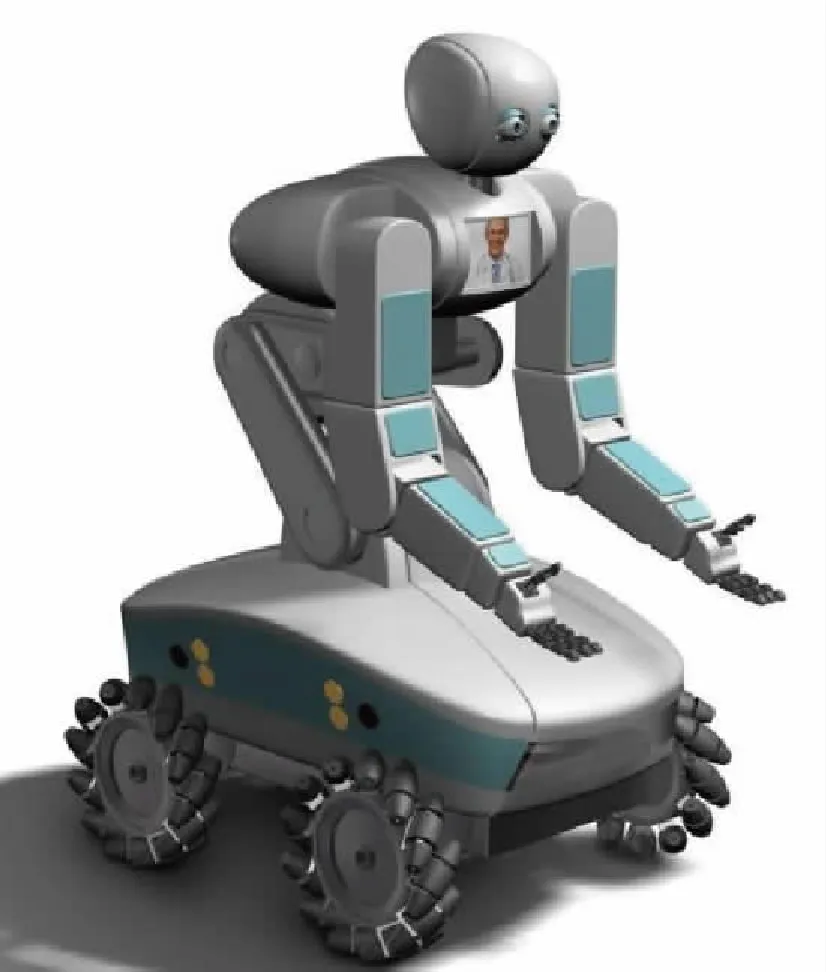
图17 常州全方位移动概念医用搬运机器人
Mecanum轮另一个重要应用是Robcup,即机器人世界足球锦标赛。该赛事是一项国际合作项目,主旨即为促进人工智能、机器人和相关领域的发展。机器人足球锦标赛涉及机器人学、人工智能、精密机械、传感、通讯等诸多领域,是高技术的对抗赛。由于麦克纳姆轮式全方位移动机器人转向时不需要改变自身的姿态下实现任意方向的移动以及以任意半径转动,因此麦克纳姆轮式全方位移动机器人非常适合于高机动性的场合。全向移动机器人无与伦比的灵活性与机动性,受到了参赛选手的青睐(图18)。

图18 全方位移动机器人比赛图片[17]
4.4 运动灵巧的制造车间AGV系统
自动导航车(Automated Guided Vehicles ,AGV)又名无人搬运车,出现于20世纪50年代,是一种自动无人驾驶的智能化搬运设备[18]。AGV在制造业的应用出现于1973 年,是瑞典的Volvo Kalmar 轿车装配厂为了提高运输系统的效率,采用AGV为载运工具的自动轿车装配线。该装配线由多台可装载轿车车体零部件的AGV系统组成。采用该装配线后,装配时间减少了20% ,装配故障减少了39%,投资回收时间减少了57% ,劳动力减少了5%。目前,AGV在世界的主要汽车厂,如通用、丰田、克莱斯勒、大众等汽车制造和装配线上得到了普遍应用。
目前,已经有许多厂家制造的几百种的承载AGV系统,广泛运行于仓库、工厂、车间、医院及其他许多领域。在邮局、图书馆、车站、码头和机场等场合,物品的运送存在着作业量变化大、动态性强、作业流程调整频繁,以及搬运作业过程单一等特点,AGV的并行作业、自动化、智能化和柔性化的特性能够很好地满足这些应用需求。
此外,在军事以及其他危险场所,以AGV的自动驾驶为基础集成其他探测和作业设备,可广泛用于战场排雷、阵地侦察等危险环境作业,如军用机器人、危险品处理机器人、钢铁炉料运送车、放射性物料搬运车、海底电缆铺设车等。
目前国际上应用于制造业的AGV系统基本采用普通差动轮驱动,需要较大的运行道路空间。而采用Mecanum轮驱动的AGV,由于其运动灵活性和定位的准确性,可以使车间面积利用率提高20%~30%;由于其可以全方位运动,甚至可以取消传统AGV上的精确平移机构,直接把工件点对点送到制造装备的安装位置(如送入切削机床的夹具上)。因此,可以进一步节约装夹时间,提高效率,具有更为广阔的应用前景。
东南大学机械学院与苏州欧米麦克机器人有限公司合作,在苏州伟恒模具制造有限公司实施了全方位移动AGV车间物流系统。在模具加工过程中,用AGV全部取代人工,在工序中搬运零件。在加工机床工位建立呼叫基站,需要运走成品转运盘或送来毛胚转运盘时,工人通过基站按键操作,中心调度计算机系统即可调度AGV连同所需空箱或毛胚箱到达仓位,建立了类似出租车调度系统的车间物流调度系统。调度系统信息采用WIFI通讯,车辆通过视觉导航循迹、RFID定位方式运行。图19为此项目验证实施状态下的Mecanum轮全方位移动AGV。
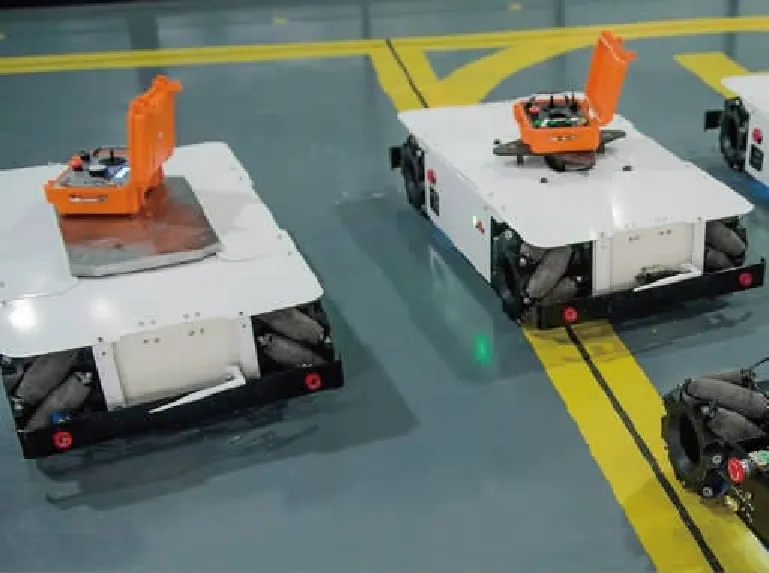
图19 全方位移动车间物流AGV
[1] 李磊, 叶涛, 谭民,等.移动机器人技术研究现状与未来[J].机器人, 2003, 24(5):475-480.
[2] 徐国华, 谭民.移动机器人的发展现状及其趋势[J].机器人技术与应用,2001(3):1-3.
[3] 赵冬斌, 易建强.全方位移动机器人导论[M].北京:科学出版社, 2010:3-5.
[4] 张毅.移动机器人技术及其应用[M].北京:电子工业出版社, 2007:11-12.
[5] 付宜利, 李寒, 徐贺,等.轮式全方位移动机器人几种转向方式的研究[J].制造业自动化, 2005, 27(10): 33-37.
[6] http://www.kaixin001.com/cdstm/photo/view_90956482_939619706_14_0_1338.html#939619706_90956482_0_14.
[7] http://tieba.baidu.com/p/1669701857.
[8] Gferrer A.Geometry and kinematics of the Mecanum wheel[J].Computer Aided Geometric Design, 2008, 25:784-791.
[9] Indiveri G.Swedish Wheeled Omnidirectional Mobile Robots: Kinematics Analysisand Control[J].IEEE Transactions on Robotics, 2009, 25(1): 164-171.
[10] 刘洲, 吴洪涛.Mecanum四轮全方位移动机构运动分析与仿真[J].现代设计与先进 制造技术,2011, 40(5):43-46.
[11] Salih J, Rizon M, Yaacob S, etc.Designing omni-directional mobile robot with mecanum wheel[J].American Journal of Applied Sciences, 2006, 3(5): 1831-1835.
[12] http://www.chinaforklift.com/shop/about.php?id=322.
[13] http://www.handyrobotwh.com/ProductShow.asp?ID=134.
[14] http://www.groundsupportworldwide.com/online/military/04_wint.pdf.
[15] http://www.robotworld.org.tw/index.htm?pid=8&News_ID=552.
[16] Kang J W, Kim B S, Chung M J.Development of omni-directional mobile robots with mecanum wheels assisting the disabled in a factory environment[C].Proceedings of the 2008 International Conference on Control, Automation and Systems, 2008: 2070-2075.
[17] http://www.rcccaa.net/shownews.asp?id=56.
[18] 杨铨.AGV系统[J].工艺装备,2002(4):52-53.
