无刷直流电机电流滞环控制策略研究
2014-08-14柴俊
柴 俊
(无锡机电高等职业技术学校,江苏 无锡 214028)
无刷直流电机是一种新型永磁电机,随着电力电子技术及新型永磁材料的发展而不断成熟。无刷直流电机换相是通过外部的电子电路而实现,用于换相的装置也起到调速的作用。电刷和换相器不直接接触,减少了电火花的产生,也大大降低了电机损耗和噪音,可避免由于机械换相导致的无线电干扰,也使得电机本体体积缩小,重量变轻[1]。目前无刷直流电机在工业、交通、航空航天、军工、伺服控制领域以及家用电器领域得到广泛应用。
本次研究主要基于无刷直流电机的数学模型,介绍目前比较热门的无刷直流电机的滞环控制策略,同时依据电机的数学模型和滞环控制思路对无刷直流电机进行仿真实验。
1 无刷直流电机数学模型
由于无刷直流电机的气隙磁场、反电动势以及电流是非正弦的,因此通常采用的直、交轴坐标变换已经不是有效的分析方法。本文中直接利用电动机本身的相变量来建立数学模型。
为了简化分析,假设电机的气隙感应电动势呈梯形分布,忽略电机中的磁滞和涡流损耗,定子齿槽的影响忽略不计,三相绕组完全对称[2]。
由以上的假设条件,无刷直流电机每相绕组的相电压由电阻压降和绕组感应电势2部分组成,其三相绕组电压平衡方程可表示为:
(1)
式中:Ua、Ub、Uc是定子绕组各相电压;R是各相绕组电阻;Ia、Ib、Ic是定子绕组各相电流;ea、eb、ec是定子绕组各相反电动势;Ls是每相绕组的自感;M是每两相绕组间的互感。
由于转子磁阻不随转子位置变化而变化,因而定子绕组的自感和互感都是常数。而电动机绕组为星形连接,且没有中线,于是有
Ia+Ib+Ic=0
(2)
MIa+MIb+MIc=0
(3)
将式(2)和式(3)代入式(1)中,整理可得:
(4)
式中:L=Ls-M。
根据上述(4)的电压方程,可得无刷直流电动机的等效电路如图1所示。图中,Ud为直流侧电压,VT1—VT6为功率开关器件,VD1—VD6为续流二极管。
无刷直流电机的电磁转矩是指电机在正常运行时,电枢绕组流过电流,这些载流导体在磁场中受力所形成的总转矩。设无刷直流电机的电流峰值为:Ip,电动势峰值为Ep,绕组只有两相同时导通,当从IPM直流侧看,两相绕为串联,所以电磁功率为Pm=2EpIp。忽略换相过程的影响,无刷直流电机的电磁转矩为:

图1 无刷直流电机等效电路图
(5)
式中:ψp为电机电磁磁链的峰值。
无刷直流电机运动方程可表示为:
(6)
式中:Te— 电机电磁转矩;
TL— 电机负载转矩;
ω— 电机角速度;
Z— 黏滞摩擦系数;
J— 电机转子的转动惯量。
2 电流滞环控制策略
无刷直流电机调速系统主要由蓄电池、无刷直流电机、逆变电路、系统控制单元等几部分组成。由于转矩和电流成正比, 一般通过控制电机的转矩来调节电机的转速,所以对电流的控制是调速系统的关键[3]。本文采用双闭环电流滞环控制来改变 PWM控制脉冲的占空比,进而改变输入无刷直流电机的平均直流电压, 以达到调速的目的。
图2为电流滞环控制系统结构图,转速调节器根据给定转速n和转速反馈n0采用控制算法得到转速调节器的输出。转速调节器的输出为相电流最大值,即参考电流生成模块的输入信号。参考电流生成模块根据相电流最大值IM和转子位置信号θ,生成三相电流的参考电流信号Iar、Ibr、Icr。电流滞环调节器的作用就是调节电机实际相电流Ia、Ib、Ic,使之跟踪参考电流信号。
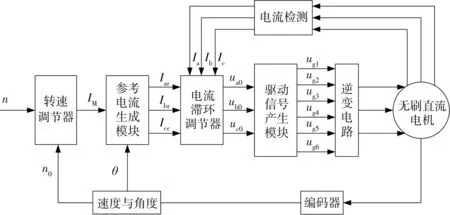
图2 电流滞环控制系统结构图
2.1 速度控制模块
图3为速度控制模块,输入为参考转速n和实际转速n0的差值,输出为三相相电流的参考值IM;其中,KP为PID控制器中比例的参数,KI为积分的参数,KD为微分的参数。Saturation饱和限幅模块将输出的三相参考相电流的幅值限定在要求范围内[4]。
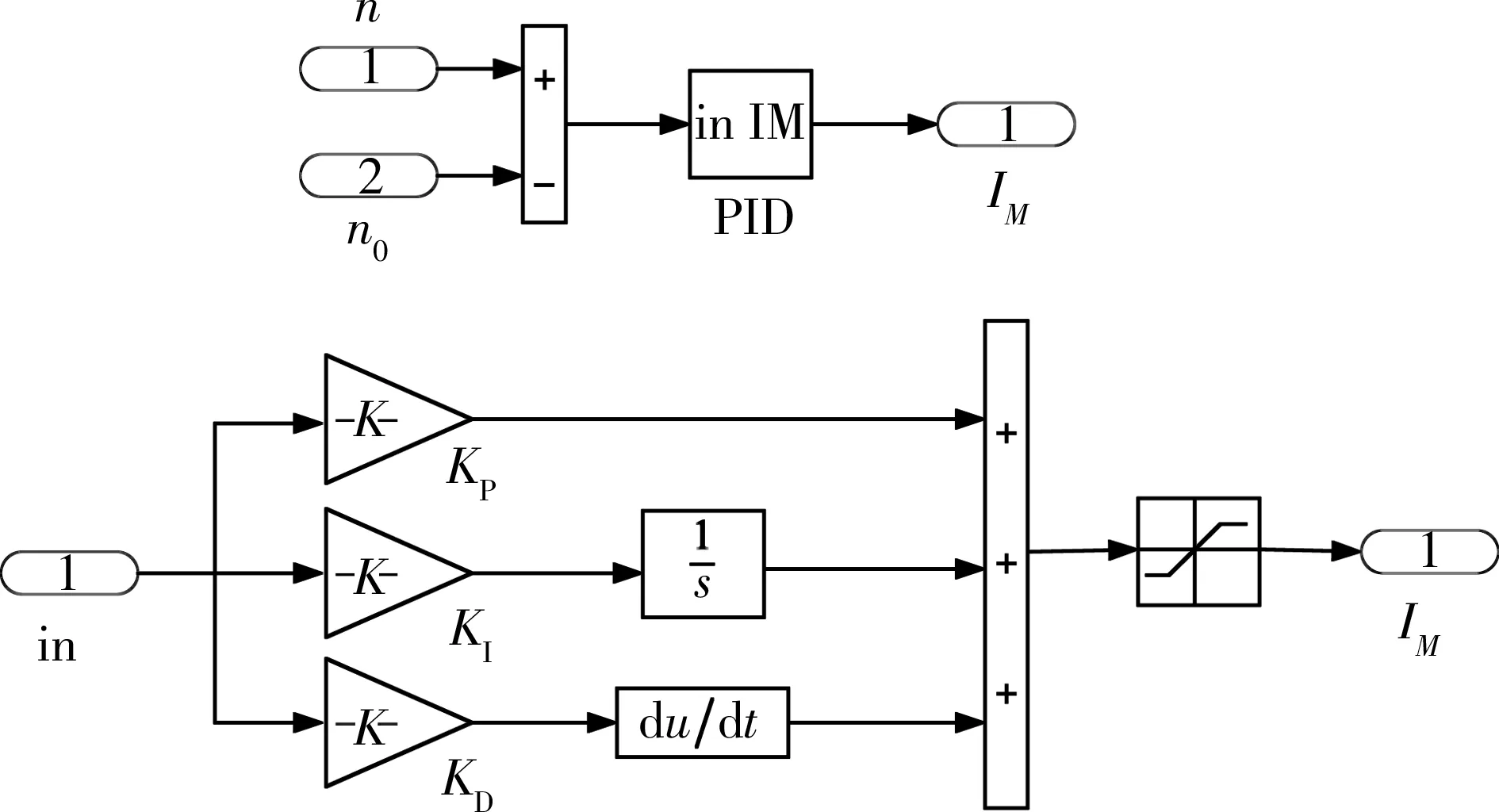
图3 速度控制模块
2.2 电流滞环控制模块
图4为电流滞环控制模块,其对应的电流滞环跟踪原理如下:当实际电流低于参考电流且偏差大于滞环比较器的环宽时,对应相桥臂正向导通,负向关断; 当实际电流超过参考电流且偏差大于滞环比较器的环宽时,对应相桥臂正向关断,负向导通。选择适当的滞环环宽,即可使实际电流不断跟踪参考电流的波形,实现电流滞环控制。
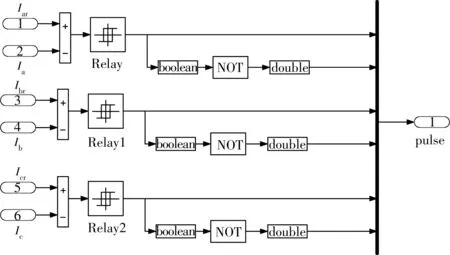
图4 电流滞环控制模块
2.3 相电流模块
图5为A相电流模块,相电流模块的输入为三相端电压和三相单位端电压,输出为相电流。
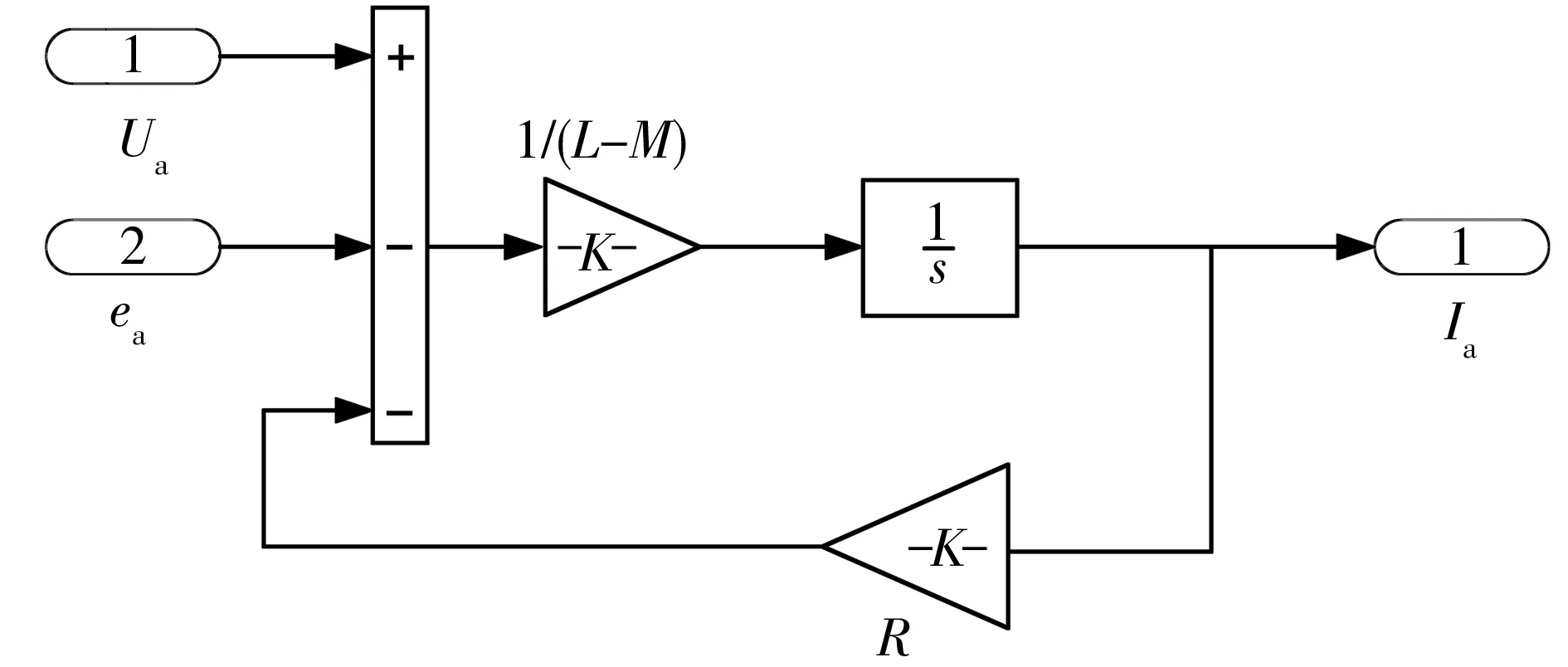
图5 A相电流模块
2.4 逆变器模块
图6为逆变器模块,逆变器是无刷直流电机的功率变换装置,输入为直流电压和驱动信号产生模块输出的触发信号,输出为三相端电压。文中逆变器建模是用matlab函数编写,即简单,又稳定[5]。

图6 逆变器模块示意图
3 仿真实验
在Matlab软件的Simulink环境下对电流滞环控制的无刷直流电机控制系统进行建模仿真。系统仿真参数如下:额定电压U为36 V,定子相绕组电阻R为0.35 Ω,转动惯量J为0.002 kg·m2,定子等效电感为0.004 6 H。
图7、图8、图9所示分别为无刷直流电机给定转速为2 000 rmin下的转速波形图、A相电流波形图、电磁转矩波形图。从图7中可以看出,电机不仅能精准的到达给定转速且到达给定转速的时间很短,这说明了系统响应快速且平稳。从图8中可以看出电机相电流运行稳定,较为理想。从图9中可以看出电机启动后电磁转矩很快达到了负载转矩。

图7 转速波形图

图8 A相电流波形图
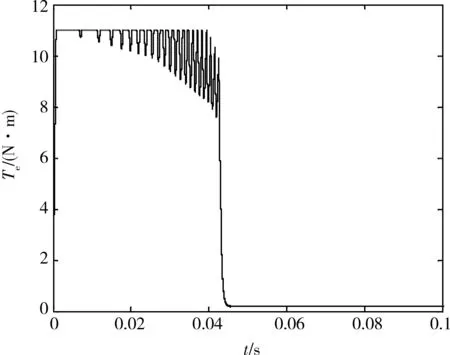
图9 电磁转矩波形图
4 结 语
本次研究在无刷直流电机数学模型的基础上,研究介绍无刷直流电机的电流滞环控制系统,并运用Matlab对其进行仿真实验。实验表明,该控制系统运行稳定、响应迅速,可以满足中小型运动控制系统的需求。
[1] 赵影,李唐娟.无刷直流电机的控制策略与仿真研究[J].电工技术,2010(3):23-24.
[2] 张琛.直流无刷电动机原理及应用[M].北京:机械工业出版社,2004.
[3] 孙佃升,高联学,白连平.电流滞环跟踪控制的永磁无刷直流电机回馈制动的研究[J].电子技术应用,2011,37(6):139-140.
[4] 朱雁南,赵军红,陈海军.无刷直流电机系统仿真建模方法[J].四川兵工学报,2012,33(10):90-91.
[5] Cheng Kuangyao,Tzou Yingyu.Design of a sensorless commutation IC for BLDC motors[J].IEEE Transactions on Power Electronic(S0885-8993),2003,18(6):1365-1375.
