基于带回转台离心机试验的惯性平台仿真建模研究
2014-08-09梁禄扬
杨 业 梁禄扬 吴 浩 郭 涛
北京航天自动控制研究所,100854
基于带回转台离心机试验的惯性平台仿真建模研究
杨 业 梁禄扬 吴 浩 郭 涛
北京航天自动控制研究所,100854

针对惯性平台基于带回转台离心机导航精度试验的需求,定义了相关坐标系及其转换关系,给出了根据离心机运转参数计算载体相对惯性系的位置、绝对速度公式,推导了惯性平台加表和角度输出模型,建立了离心运动模型。最后,设计了长时间交替过载的离心机运动轨迹,并通过数学仿真对建模的正确性进行了验证,实现了惯性平台在离心机上运动过程的模拟,可用于开展基于离心机导航精度试验的仿真分析。
离心机 ;惯性平台; 运动建模
高精度离心机主要用于加速度表的标定,其特点是负载小,转臂短,精度非常高。而一般的大过载离心机主要用于产品的力环境试验、例行试验[1-2],转臂长达10m,负载的体积和质量大,精度较差。目前,有关离心机用于惯性导航系统参数标定[3-4]、误差分离以及精度试验的研究报道还比较少,主要原因有2个方面:1)由于负载体积和重量大,各种干扰因素对离心机影响大,导致其精度指标难以提高,其所能达到的过载精度远低于加速度计的精度指标,在此条件下对惯性系统进行系统级标定和误差分离难度很大;2)由于开展惯性系统精度试验比较复杂,且受试验条件的限制,专门针对惯性系统开展的大过载精度试验比较少。
本文主要针对带回转台的大过载离心机,建立了离心机运动模型,实现了惯性平台在离心机上运动过程的模拟。对于开展基于离心机的导航精度试验、数学仿真具有指导意义。
1 大过载离心机介绍
本文所研究的离心机如图1所示,离心机采用臂式结构,在摆臂端头配备一回转台,可以对负载实现消旋。
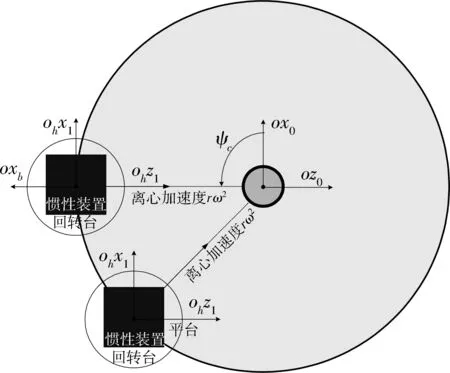
图1 离心机运动示意图
负载固定在回转台上,采用回转台消旋,可以保证惯性测量装置在空间指向基本不变。实际上,由于控制误差,回转台在消旋过程中还存在一定的误差,因此,在离心机转臂转动过程中,惯性测量装置在回转台上与初始惯性空间可能存在角度偏差和微小的角运动。这种偏差会影响离心机的过载精度,但对导航精度试验没有影响。
2 坐标系定义与转换关系
2.1 坐标系定义
根据离心机的设计参数和特点,定义如下坐标系,用于惯性平台在离心机上的运动建模。
1)离心机坐标系o-x0y0z0:以离心机摆臂中心所在地为原点,定义北天东坐标系,该坐标系为离心机坐标系,离心机坐标系可与发射坐标系等同,o点参数为(L0,B0,A0,h)。
2)摆臂坐标系o-xbybzb:以摆臂中心点为原点,沿摆臂向外为xb轴,ybzb在离心机坐标系平面内。定义离心机摆臂角度为ψc,ψc为离心机摆臂相对ox0轴的夹角,如果忽略离心机的偏斜问题(离心机旋转面的偏斜对精度试验不产生影响),则将离心机坐标系o-x0y0z0沿y0轴旋转ψc,即为摆臂坐标系。
3)回转台坐标系oh-x1y1z1:以回转台中心为原点,如果启用离心机的消旋功能,理论上回转台坐标系与离心机坐标系完全一致。如果锁定离心机的消旋功能,回转台坐标系与摆臂坐标系完全一致(这里忽略了回转台相对摆臂平面安装偏斜角的误差,对导航精度试验不产生影响)。定义回转台坐标系与离心机坐标系夹角为ψ1,将离心机坐标系o-x0y0z0沿y0轴旋转ψ1,即为回转台坐标系。对惯性系统而言,回转台坐标系类似飞行器的弹体坐标系。
4)惯性坐标系o-xyz:为惯性导航基准,在惯性导航开始时刻与离心机坐标系o-x0y0z0重合。
2.2 转换关系
2.2.1 回转台坐标系到摆臂坐标系的转换矩阵
将回转台坐标系沿ohy1轴旋转ψc-ψ1角度,即得到摆臂坐标系。其转换矩阵为:
(1)
2.2.2 离心机坐标系到回转台坐标系的转换矩阵
将离心机坐标系沿oy0轴旋转ψ1角度,即得到回转台坐标系。其转换矩阵为:
(2)
在仿真时,如果回转台稳定较差,可以考虑增加回转台的控制误差,如常值误差、正弦变化误差等。
2.2.3 离心机坐标系到摆臂坐标系的转换矩阵
将离心机坐标系沿oy0轴旋转ψc角度,即得到摆臂坐标系,其转换矩阵为:
(3)
3 离心机运动建模
下面主要研究离心机运动模型和惯性平台在离心运动下的输出。运动建模主要包括3部分:1)根据离心机的运转参数推导载体相对惯性系的位置、绝对速度;2)根据离心机的运动特性,推导负载角运动模型;3)根据离心机运动特性,推导惯性平台加表输出模型。将负载角运动模型与平台加表输出模型作为惯性导航输入,用于开展数学仿真计算和分析。
3.1 离心机坐标系相关参数计算
离心机坐标系相关系数的计算:bx=cosA0cosB0,by=sinB0,bz=-sinA0cosB0。
地心纬度:φx0=arctan[(1-e2)tanB0],
离心机坐标系上的个3分量:R0x=-R0cosA0sinμ0,R0y=R0cosμ0,R0z=R0sinA0sinμ0,其中,μ0=B0-φx0。
3.2 负载位置和速度计算
3.2.1 离心机负载位置
在离心机运动过程中,负载位置为圆周运动,惯性平台实际位置与摆臂角度相关。因此,可直接根据角度给出线运动位置,负载在离心机坐标系的位置为:
(4)
将负载在离心机坐标系的位置转换为发射惯性系的位置:
(5)
其中,B为惯性系至离心机坐标转换矩阵。
3.2.2 离心机负载速度
假设离心机运转角速度为ω,半径为r,则负载在离心机坐标系的线运动速度为Vr=rω。
负载在摆臂坐标系速度为VBl=[0 0 -rω]T,得到负载相对地球运动速度在惯性系的分量如下:
(6)
进而可得到负载相对惯性系的绝对速度为:
(7)
其中,Vex,Vey,Vez为牵连运动速度。
(8)
3.3 负载角运动模型
由于负载固定在离心机回转台上,理想条件下,回转台相对离心机坐标系无角度运动,但相对惯性坐标系存在角度运动,因此,在建模时需要计算回转台相对惯性坐标系的姿态角变化,下面将通过坐标变化给出负载的姿态角。
(9)
因此,离心运动条件下,回转台相对惯性系的姿态角为:
(10)
3.4 惯性平台加表输出
合外力加速度主要包括2项:1)负载相对离心机坐标系的运动加速度,包括离心运动产生的加速度,离心机加速和减速产生的线加速度;2)地球牵连运动产生的牵连加速度。
3.4.1 离心运动加速度

3.4.2 地球牵连力产生的加速度
由于负载固联在地球上,还受到牵连加速度影响:
1)地球自转角速度在离心机坐标系分量
(11)
2)地球自转角速度在发射惯性系分量
(12)
3)地球自转引起的牵连加速度在惯性系分量
(13)
其中,rx=R0x+x,ry=R0y+y,rz=R0z+z,为负载地心矢径相对惯性系分量。
3.4.3 地球引力的计算
地球引力按照文献[5]给出的公式计算,这里不再详述。假设惯性系引力加速度gi=[gxgygz]。
3.4.4 惯性平台输出比力
惯性平台加表敏感的比力为:
(14)
4 仿真分析
仿真初始条件及参数如下:

表1 仿真条件
离心机试验采用长时间交替过载方案,即当惯性平台完成调平瞄准后,离心机从静止开始运动。在0~30s内,过载从0加速到3g0;在30~60s内,过载从3g0降到0,不断交替运行,直至660s停止。离心机运动规律如图2和3所示。
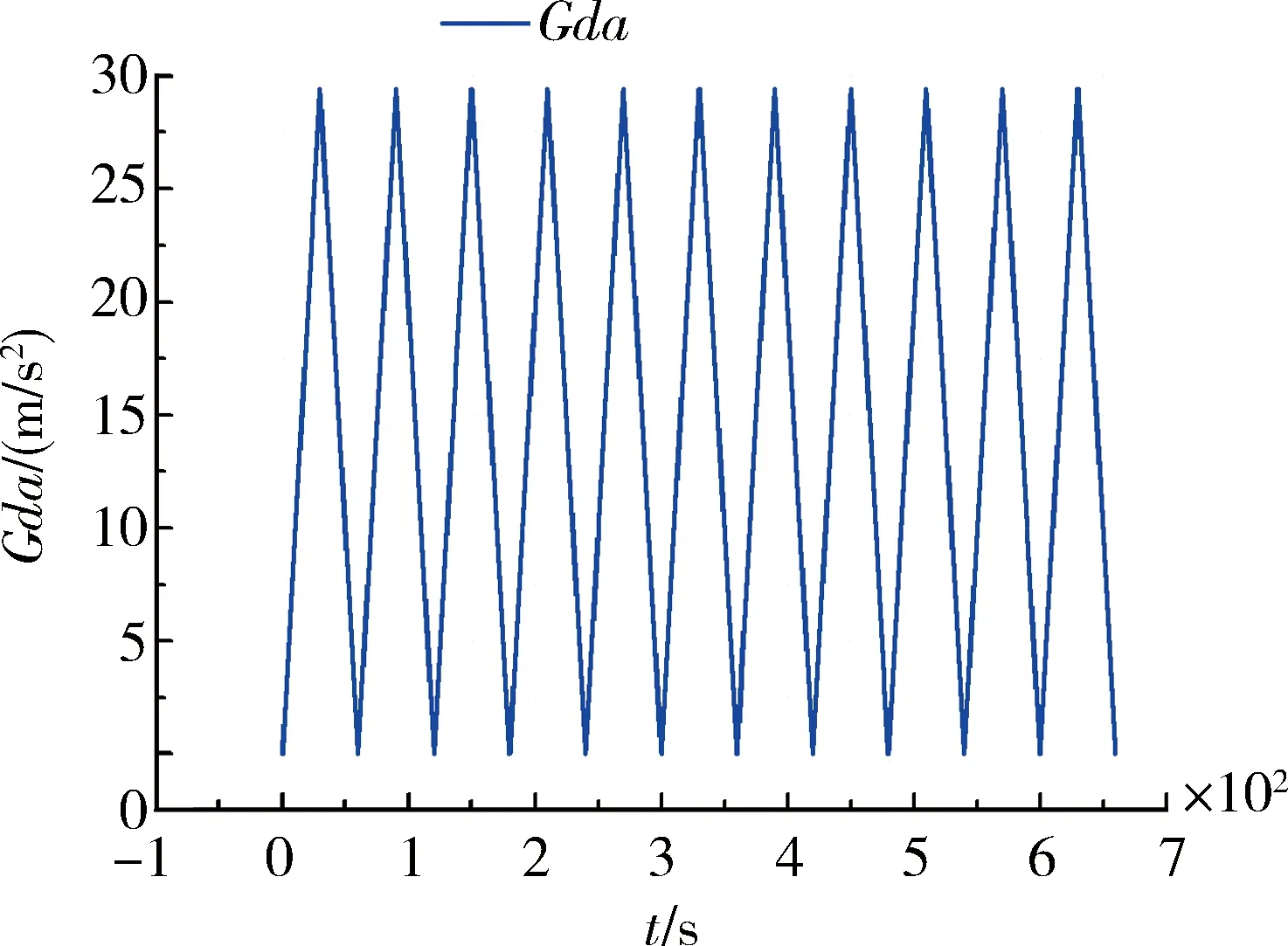
图2 离心加速度
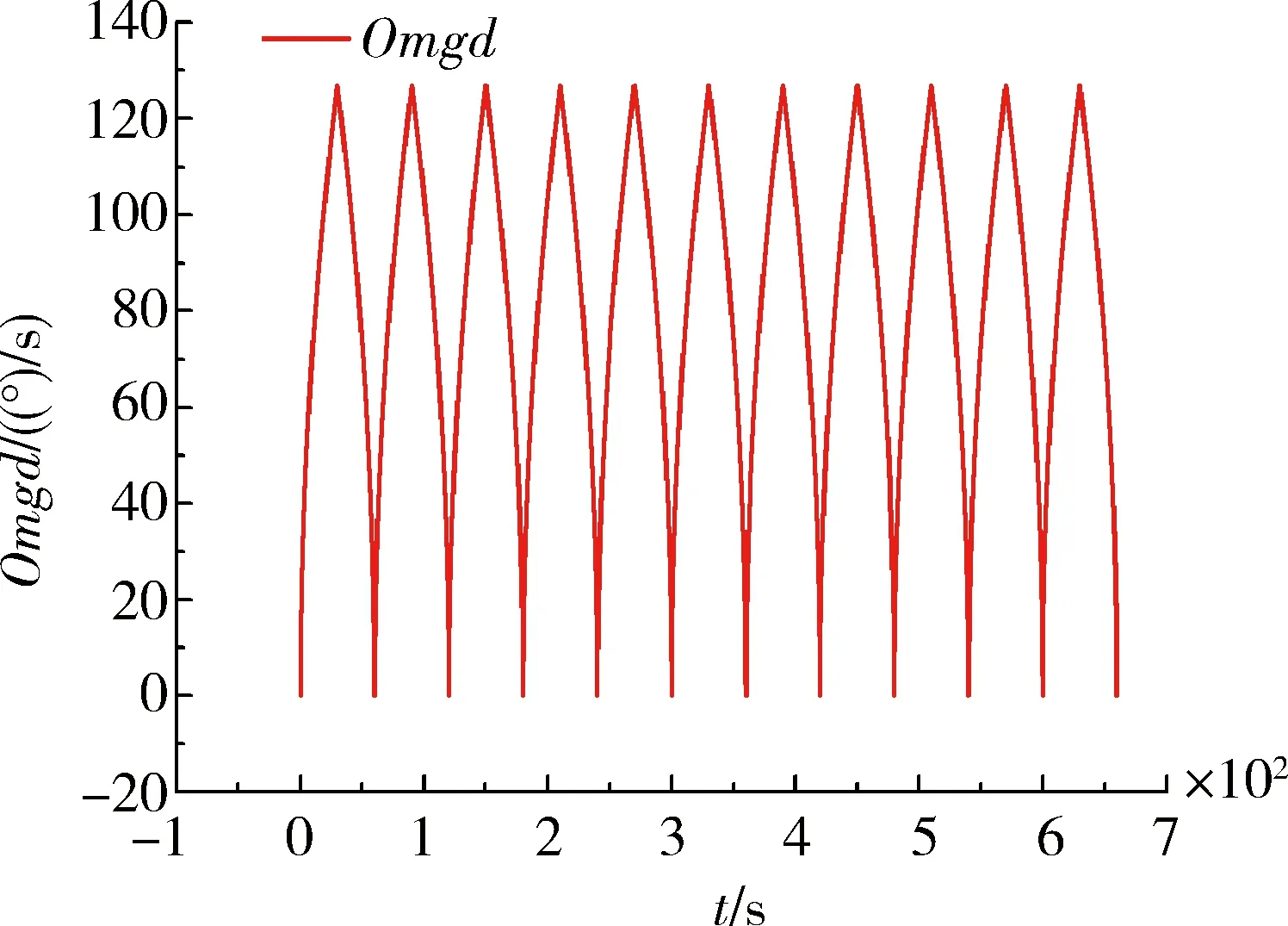
图3 离心角速度
不考虑惯性平台工具误差,将惯性导航解算出的位置、速度、高度与负载运动时的模型参数进行比较,如表2所示,经历660s的交替变化过载运动,两者仿真结果基本一致,说明本文所提出的建模方法正确。

表2 惯性导航解算参数与负载运动模型参数的误差
5 结束语
建立了离心机运动模型,实现了离心运动条件下惯性平台姿态角与加表输出信息的模拟,并通过数学仿真验证了模型的正确性,为开展基于离心机的导航精度试验、惯性误差分析奠定了一定的理论基础,后续需要进一步深入研究离心试验对惯性平台误差系数的激励情况。
[1] 乔永辉,李丹东,苏宝库.带反转平台离心机主轴回转误差对陀螺加速度计测试精度的影响研究[J].航空精密制造技术,2013,49(1):11-14.(QIAO Yonghui, LI Dandong, SU Baoku. Research on Influence of Spindle Rotary Error of Centrifuge with Counter-rotating Platformon PIGA Model Coefficients Test Accuracy[J]. Aviation Precision Manufactring Technology, 2013,49(1):11-14.)
[2] 王世明,王翌,伊国兴,等.精密离心机的惯性组合加速度计的参数标定方法[J].中国惯性技术学报, 2013,21(2):264-270.(WANG Shiming, WANG Yi, YI GuoXing, REN Shunqing, LU Jinrui. Calibration of Accelerometers Fixed in SINS on Precision Centrifuge[J]. Journal of Chinese Inertial Technology, 2013,21(2): 264-270.)
[3] 陈才,王毅,郭刚,苏宝库.惯性导航平台辨识的离心机方法[J].电机与控制学报, 2010,24(1):85-89.(CHEN Cai, WANG Yi, GUO Gang, SU Baoku. Centrifuge Methodology of Inertial Navigation Platform Identification[J]. Electric Machines and Control, 2010,24(1):85-89.)
[4] 陈才,郭刚,苏宝库.基于离心机测试的惯导平台误差系数辨识研究[J].系统工程与电子技术, 2010,32(8):1738-1740.(CHEN Cai, GUO Gang, SU Baoku. Research on Error Model Identification of Inertial Navigation Platform Based on Centrifuge Testing[J]. Systems Engineering and Electronics, 2010, 32(8):1738-1740.)
[5] 贾沛然,陈克俊,何力.远程火箭弹道学[M].长沙:国防科技大学出版社,1993.
Inertial Platform Modeling and Simulation Based on Centrifuge Test with a Rotating Table
YANG Ye LIANG Luyang WU Hao GUO Tao
Beijing Aerospace Automatic Control Institute, Beijing 100854, China
Inordertomeettherequirementsofcentrifugewitharotatingtablefornavigationtests,amethodforcentrifugemodelingisproposed,inwhichthevehicle’smotioninformationininertialcoordinateisobtainedandtheoutputmodelofinertialplatformisbuild.Atrajectorywithalternativeoverloadisdesignedinthispaper.Simulationresultshowsthevalidityofmodeling,realizingtheinertialplatformsimulationbasedoncentrifuge,whichcanbeusedfornavigationprecisiontests.
Centrifuge;Inertialplatform;Motionmodeling
2014-01-04
杨 业(1977-),男,湖北天门人,博士,研究员,主要研究方向为飞行器制导与控制;梁禄扬(1987-),男,四川隆昌人,硕士,助理工程师,主要研究方向为导航与制导;吴 浩(1980-),男,武汉人,博士,工程师,主要研究方向为飞行器制导与控制;郭 涛(1983-),男,山东潍坊人,博士,工程师,主要研究方向为飞行器制导与控制。。
V416.2;U666.12
A
1006-3242(2014)02-0009-04
