SVPWM过调制算法磁链分析及在永磁同步电机驱动中的应用*
2014-08-09杨澜倩王永华杨向宇
杨澜倩, 唐 校, 万 频, 王永华, 杨向宇
(1. 广东工业大学 自动化学院,广东 广州 510006; 2. 华南理工大学 电力学院,广东 广州 510640)
0 引 言
现代电机普遍采用DC/AC供电模式。电机的运行性能很大程度上取决于逆变器输出电压的范围和品质。采用空间矢量脉宽调制(Space Vector Pulse Width Modulation, SVPWM)过调制方式可以提高直流电压利用率,扩展逆变器输出电压的范围。已有不少文献[1-5]对SVPWM过调制算法进行了探讨,多是集中在算法的改进上,较少对与SVPWM密切相关的定子磁链在过调制时的特性进行系统分析。本文依据文献[4]所提的一种简单算法,分析了各阶段的定子磁链特性。将该过调制策略应用于永磁同步电机的驱动中,对电机的运行特性进行了仿真研究。
1 SVPWM电压矢量与磁链矢量的关系
通过调节电机相电压可以改变作用于相绕组的磁动势和磁场,电压本身没有空间的含义,将外加相电压与相绕组所产生的磁动势联系起来时,电压才被赋予了空间含义[6]。SVPWM控制实质是磁链跟踪控制。依据伏秒平衡原理即磁链等效原理,由基本开关矢量合成得到等效的参考电压矢量。SVPWM的基本电压空间矢量如图1所示。

图1 SVPWM基本电压空间矢量
当忽略定子压降时,定子合成电压与合成磁链空间矢量之间的关系为[7]
(1)
即为
Δψs=usΔt
(2)
式(2)说明定子磁链的变化量与作用的电压矢量方向一致,大小等于电压矢量对时间的积分。在时间t内,定子磁链可以由式(3)计算得
(3)
式中:φ——电压矢量us的相角;
ω——us的角速度。
2 SVPWM过调制算法
为了提高逆变器直流侧的电压利用率,常常需要采用过调制方式。SVPWM所能调制输出的电压矢量限制在图1所示六边形内,对超出六边形边界的矢量无法实际跟踪,需要采用合适的电压矢量代替目标矢量。这就是过调制的内涵。矢量包含幅值和相角两个因素,不同的过调制策略是对这两个因素进行不同的处理,以达到较佳的输出效果。在输出效果相近的情况下,力求算法的简捷易实现。

图2 SVPWM过调制原理图
SVPWM过调制原理图如图2所示。图2所示为第一个扇区情况,其他扇区与此作相同处理。三角形OBH对应图1六边形的一个区域,实际输出的电压矢量与参考电压矢量等效。算法将过调制区域分成两个部分: 第一部分为三角形BHF范围,将这个范围内的参考电压矢量压缩至BH边,实际输出电压矢量的幅值改变,而相角不变;另一部分为三角形BHF外的部分,当参考电压矢量位于这个区域时,实际输出的电压矢量为某个基本电压矢量,相对参考电压矢量,实际输出矢量的幅值和相角都发生改变,在这个区域是保持最大电压矢量输出,即全范围内称为“六阶梯波”的调制方式。文献[4]中所提方法通过基本矢量的作用时间对两个区域进行判断,而无须进行保持角的计算,使整个过调制算法变得简单易于实现。
3 SVPWM各阶段磁链的形状和大小
以电压矢量和磁链矢量的关系,分析SVPWM各阶段的磁链形状和大小(以参考电压矢量us的大小划分)。

(4)
如果参考电压矢量幅值一定且旋转的速度恒定,其产生的磁链矢量轨迹是标准的圆形,磁链圆的大小与电压矢量旋转的速度成反比,相角滞后电压矢量相角π/2,磁链矢量圆的圆心比电压矢量圆的圆心要高,如图3所示。

图3 us≤Udc/时的矢量轨迹图

如图2中圆弧2所示,参考电压矢量位于该区间且匀速旋转一周时,实际输出的电压矢量将有一部分是圆弧,该部分可以跟踪参考电压矢量;另一部分位于六边形的边上,该部分对参考电压矢量进行了处理。由其积分产生的磁链矢量轨迹将不是标准的圆形,而是部分为椭圆形轨迹,如图4所示。六边形边上的矢量大小改变,故其积分值是一段椭圆弧,但是一个周期的磁链形状仍非常接近圆形。
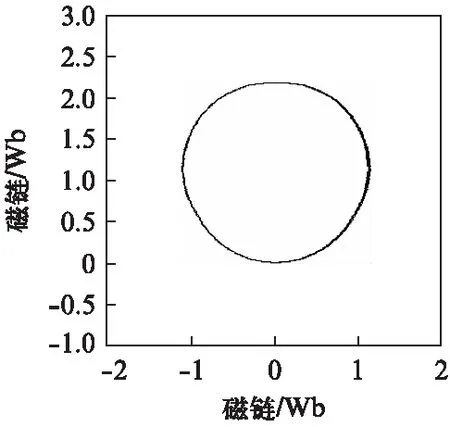
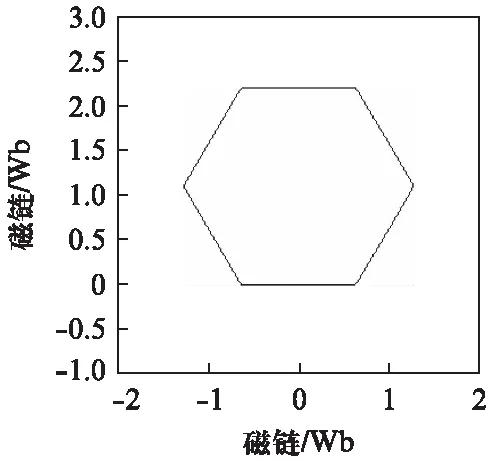
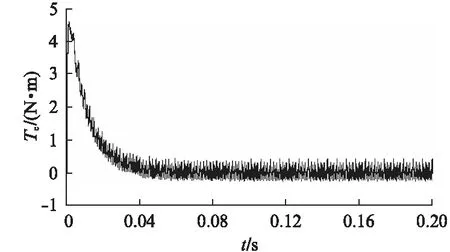
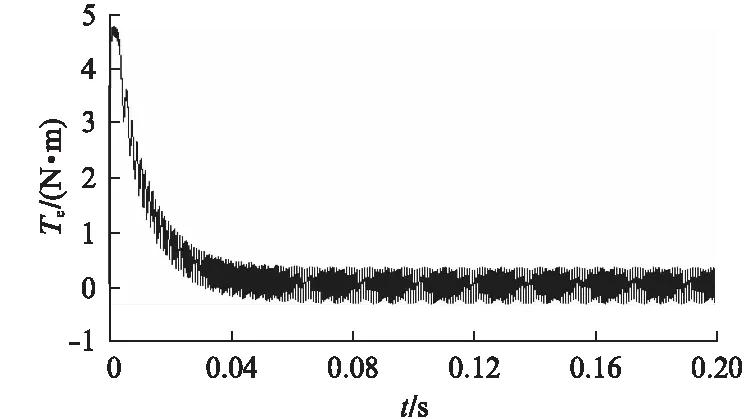
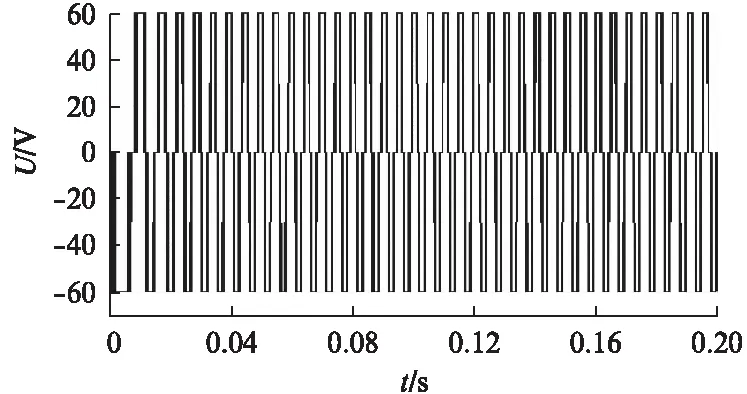
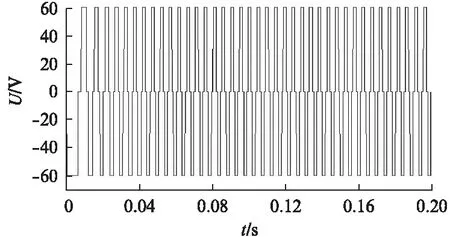
图 如图2中的圆弧3所示,参考电压矢量位于该区间时,实际输出的电压矢量均无法跟踪参考电压矢量。实际输出电压矢量有一部分是基本电压矢量(大小等于2Udc/3)单矢量输出,还有一部分被压缩到图1所示电压矢量六边形的边上。单独某个基本矢量作用时,虽然电压矢量不变,但是在其作用下的磁链却是运动的,且轨迹为直线。该情况下,当参考电压矢量匀速旋转一周时,所产生的磁链矢量轨迹包含有直线和圆弧部分,如图5所示。 图 如图2中圆弧4所示,在该情况下,实际输出的电压矢量是图1电压矢量六边形的6个顶点处的基本电压矢量,此时单相电压即为6阶梯波样式,如图6所示。电压矢量不变时,其积分产生的磁链是直线形,故该情况下,磁链矢量轨迹为正六边形。六边形的大小由参考电压矢量的旋转速度决定,速度越快,六边形越小。 图即六阶梯波时磁链轨迹图 永磁同步电机在现代工业中应用越来越广泛。将过调制策略应用在其驱动中,可以加快电机的瞬态响应速度,并拓宽电机运行速度的范围。但过调制下的磁链轨迹不是标准圆形,故电磁转矩将存在脉动情况。永磁同步电机的电磁转矩te可表示为 te=pψs×is=pψsiT (5) (6) 式中:p——极对数; iT——定子转矩电流分量; Ls——定子等效自感; ψf——转子永磁磁链; δsf——负载角。 由式(5)可知,当定子磁链幅值不恒定时,电磁转矩不再与转矩电流分量iT成线性关系。由式(6)可知,过调制增大了定子磁链,从而增大了电机的输出转矩。由于ψs幅值改变,负载角不变时,将引起电磁转矩的变化。由过调制各阶段磁链形状可知,随着过调制程度的加深,磁链从圆形过渡到六边形,一个周期磁链变化量逐渐变大,导致转矩的波动变大。 在MATLAB/Simulink环境下搭建模型,对应用过调制策略后的永磁同步电机运行特性进行了仿真研究,并与没有采用过调制时的电机运行特性进行了对比。仿真模型采用三相全桥电路,逆变器直流侧电压为60V,永磁同步电机空载,给定转速为500r/min。其中的过调制策略采用S函数编写。仿真模型中,永磁同步电机的参数如表1所示。 表1 永磁同步电机的参数 未过调制、过调制时的永磁同步电机速度曲线分别如图7、图8所示。由于受制于直流侧的电压,电机转速未能达到给定转速。对比二者可知: (1) 过调制时,由于进一步提高了直流侧电压率,提高了电机的最大速度;(2) 过调制时,电机输出力矩增大,速度响应比未过调制时快。 图7 未过调制时永磁同步电机速度曲线 图8 过调制时永磁同步电机速度曲线 未过调制、过调制时的永磁同步电机转矩曲线分别如图9、图10所示。从图中可以发现,电机在过调制处理时的转矩脉动增大。 图9 未过调制时永磁同步电机转矩曲线 图10 过调制时永磁同步电机转矩曲线 未过调制、过调制时的永磁同步电机线电压波形分别如图11、图12所示。图11显示逆变器在一个采样周期中输出电压为PWM模式,由基本电压合成。图12对应的电机相电压为6阶梯模式,这种情况是逆变器能够输出的最大电压。 图11 未过调制时永磁同步电机线电压波形 图12 过调制时永磁同步电机线电压波形 SVPWM控制与电机定子磁链密切相关。本文从电压矢量与磁链矢量的关系出发,分析了一种过调制策略各阶段的磁链形状和大小。定子磁链直接关系到电机的运行性能,采用过调制策略应用于电机驱动,能加快电机的响应过程,拓宽电机运行速度的范围。本文的结论可为过调制策略在电机运动控制中的应用提供参考。 【参考文献】 [1] JOACHIM H. Pulsewidth modulation—A survey [J]. IEEE Transactions on Industrial Electronics, 1992,39(5): 410- 420. [2] 王旭东,张思艳,余腾伟,等.SVPWM过调制中控制角算法的分析与应用[J]. 电机与控制学报,2010,14(12): 63- 67. [3] 李计亮,高琳,刘新正,等.过调制算法在永磁同步电机弱磁调速系统中的应用[J]. 微电机,2010,43(12): 43- 47. [4] 吴芳,万山明,黄声华,等.一种过调制算法及其在永磁同步电动机弱磁控制中的应用[J]. 电工技术学报,2010,25(1): 58- 63. [5] JIDIN A, IDRIS N, ABDULLAH A R, et al. A hybrid DTC-DSC drive for high performance induction motor control [J]. Journal of Power Electronics, 2011,11(5): 704-712. [6] 王成元,夏加宽,孙宜标,等.现代电机控制技术[M].北京: 机械工业出版社,2008. [7] 阮毅,陈伯时. 电力拖动自动控制系统——运动控制系统[M]. 4版.北京: 机械工业出版社,2009.


4 过调制策略在永磁同步电机驱动中的应用




5 结 语
