车载移动激光扫描测量瞬时外方位元素精确直接解算方法
2014-08-05李晓红
李晓红
(山西省基础地理信息院,山西太原 030001)
车载移动激光扫描测量瞬时外方位元素精确直接解算方法
李晓红
(山西省基础地理信息院,山西太原 030001)
一、引 言
车载移动激光扫描系统通过直接地理定位方法可直接得到WGS-84坐标系下的点云[1-3]。WGS-84坐标系统是美国为GPS全球定位系统使用而建立的全球通用的坐标系统;而在我国实际工程应用中,使用的基础地理信息数据是基于我国建立的国家大地坐标系统,如1954北京坐标系、1980西安坐标系或者CGCS2000坐标系统[4-5],因此车载移动激光扫描系统采集的点云在使用前需从WGS-84坐标系转换到国家大地坐标系中。有两种方法可实现将车载移动激光扫描系统采集的点云转换到国家大地坐标系中:①转换点云数据,即先将车载激光扫描系统采集的原始激光点解算到WGS-84坐标系统中,再将WGS-84坐标系统中的点云通过坐标转换的方法转换到国家大地坐标系中;②转换外方位元素,即将WGS-84坐标系下的外方位元素转换到国家大地坐标系中,车载激光扫描系统采集的原始激光点与国家大地坐标系中的外方位元素融合直接得到国家大地坐标系下的激光点云。方法①分两步进行,第一步采用车载激光扫描系统设备提供商提供的激光点云解算软件将原始激光点解算到WGS-84坐标系;第二步使用已有的坐标转换软件将WGS-84坐标系下的激光点云转换到国家大地坐标系中,此方法能够最大限度地利用已有的软件,但是两步转换耗费大量的时间。方法②通过解算国家大地坐标系下的外方位元素,直接解算得到国家大地坐标系下的激光点云,节省大量的解算时间。本文研究车载移动激光扫描系统在国家大地坐标系中外方位元素的精确直接解算方法,实现车载移动激光扫描系统国家坐标系下激光点云的直接解算。
二、直接地理定向中相关坐标系
在国家大地坐标系下进行直接地理定向,涉及两个参考椭球(WGS-84参考椭球与国家参考椭球),以及基于这两个椭球的多个坐标系,涉及的坐标系见表1[6]。
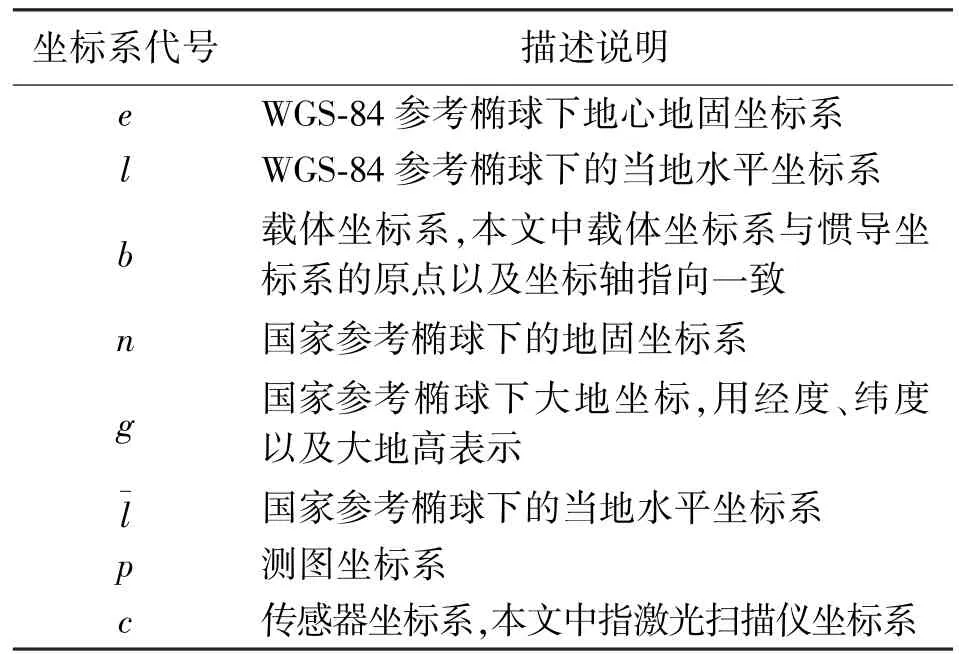
表1 直接地理定向中相关坐标系
三、车载激光扫描仪外参数
在车载移动激光扫描系统中,POS系统与激光扫描仪的坐标系原点一般不一致,它们之间存在偏移量;其坐标轴指向也难以保证一致,通常两坐标轴系之间存在小的角度偏差[7];POS系统坐标系与激光扫描仪坐标系之间的平移与旋转关系通常统称为激光扫描仪外参数,车载移动激光扫描系统在投入使用之前,需对激光扫描仪外参数进行检校。
四、车载激光扫描系统瞬时外方位元素求解
车载激光扫描系统瞬时外方位元素求解指通过POS系统输出的惯导坐标系原点的位置以及惯导坐标系相对于当地水平坐标系(l系)的姿态角(roll、pitch、heading)求激光扫描仪在国家坐标系中外方位线元素与外方位角元素。
1.外方位线元素求解
激光扫描仪坐标中心XPC在载体坐标系(惯导坐标系)下的坐标即为激光扫描仪坐标系在载体坐标系下的偏移量,通过式(1)求得相机摄影中心在地心地固坐标系下的坐标

获得激光扫描仪坐标系原点在地心地固坐标系中的坐标后,通过七参数转换,获得激光扫描仪坐标系原点在n系(国家参考椭球)中的空间直角坐标

2.外方位角元素求解
外方位角元素求解是指利用POS系统输出的惯导坐标系在当地水平坐标系(l系)的姿态角(roll、pitch、heading)求激光扫描仪坐标系在测图坐标系中的姿态。文献[8―11]研究了将航空摄影测量中GPS/INS输出的姿态角转换为影像的外方位元素,其中文献[8]先将所有影像曝光时刻POS系统的姿态角归算到测区中心的当地水平坐标系(l系),最后一次性补偿地球曲率与子午线偏差对姿态角的影响,获得影像的外方位角元素;文献[9―10]对每一个影像曝光时刻POS姿态角使用补偿矩阵补偿子午线偏差的影响获得影像的外方位角元素;文献[11]提出了一种通过坐标转换直接计算影像在测图坐标系中外方位角元素的方法。本文借鉴文献[11]中的方法,求解车载激光扫描仪在国家坐标系中的外方位角元素。
设在激光扫描仪坐标系中有3个点,Ac=(1,0,0)、Bc=(0,1,0)、Cc=(0,0,1),在激光扫描仪坐标系原点在测图坐标系中的坐标已知的情况下(通过上述外方位线元素求解方法求得),只要求得Ac、Bc、Cc3点在测图坐标系中的坐标,即可通过坐标转换的方式直接求得激光扫描仪坐标系到测图坐标系中的转换关系,即可求得影像的外方位角元素,解算过程叙述如下:
1)获取Ac、Bc、Cc3点在地心地固坐标系中的坐标。通过上述获得的系统检校参数(激光扫描仪坐标系原点在载体坐标系下的偏移量以及激光扫描仪坐标系与载体坐标系之间的旋转矩阵),可得到3点在载体坐标系下的坐标
再通过POS系统输出的roll、pitch、heading角度生成载体坐标系到当地水平坐标系的转换矩阵,将3点从载体坐标系转换到当地水平坐标系
获得3点在l系中的坐标后,通过下式获得3点在e系中的坐标

2)获得3点在n系中的坐标。3点在e系中的坐标可通过七参数转换为n系中坐标,设e系坐标系原点在n系的坐标为e系到n系转换的旋转矩阵为,尺度参数为μn,则3点在n系中的坐标可通过下式得到

3)获得3点的经纬度。3点的经纬度可通过3点在n系中的坐标直接获得,即

4)通过地图投影获得3点在测图坐标系中的坐标。选择合适的投影方式以及中央经度将3点的经纬度进行投影变换得到3点在测图坐标系中的坐标,即
5)激光扫描仪外方位元素求解。求得3点在测图坐标系中的坐标后,设激光扫描仪坐标系到测图坐标系的旋转矩阵为,则3点在激光扫描仪坐标系的坐标以及在测图坐标系中的坐标可通过下式联系


五、试验与分析
试验中采用车载激光扫描系统采集的实际数据,通过POS系统输出的惯导坐标系中心在WGS-84坐标系中的经纬度以及惯导平台在当地水平坐标系中的姿态角roll、pitch、heading解算激光扫描仪在1980西安坐标系中的外方位元素(解算过程中使用激光扫描仪外参数补偿激光扫描仪坐标系与惯导坐标系不一致造成的误差)。
为了验证本文解算方法的正确性,使用商业POS数据处理软件Inertial Explorer[12]输出激光扫描仪在1980西安坐标系中的外方位元素(解算过程中使用激光扫描仪外参数补偿激光扫描仪坐标系与惯导坐标系不一致造成的误差),通过比较本文的解算结果与Inertial Explorer输出的结果,验证本文解算结果的精度。
图1是本文解算的外方位线元素与Inertial Explorer输出的外方位线元素的差值。从图1中可知,解算的外方位线元素与Inertial Explorer输出的外方位线元素的差值不超过0.1 cm;图2是本文输出的外方位角元素与Inertial Explorer输出外方位角元素的差值,从图2可知解算的外方位角元素与Inertial Explorer输出的外方位角元素的差值不超过0.8 s;解算结果与Inertial Explorer输出结果的差值的均方误差与均值见表2,其均方误差与均值均接近于零。

表2 解算外方位元素与Inertial Explorer输出外方位元素差值的均方误差与均值
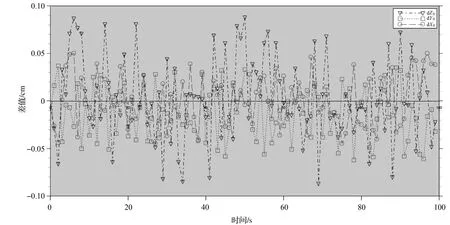
图1 解算外方位线元素与Inertial Explorer输出外方位线元素差值
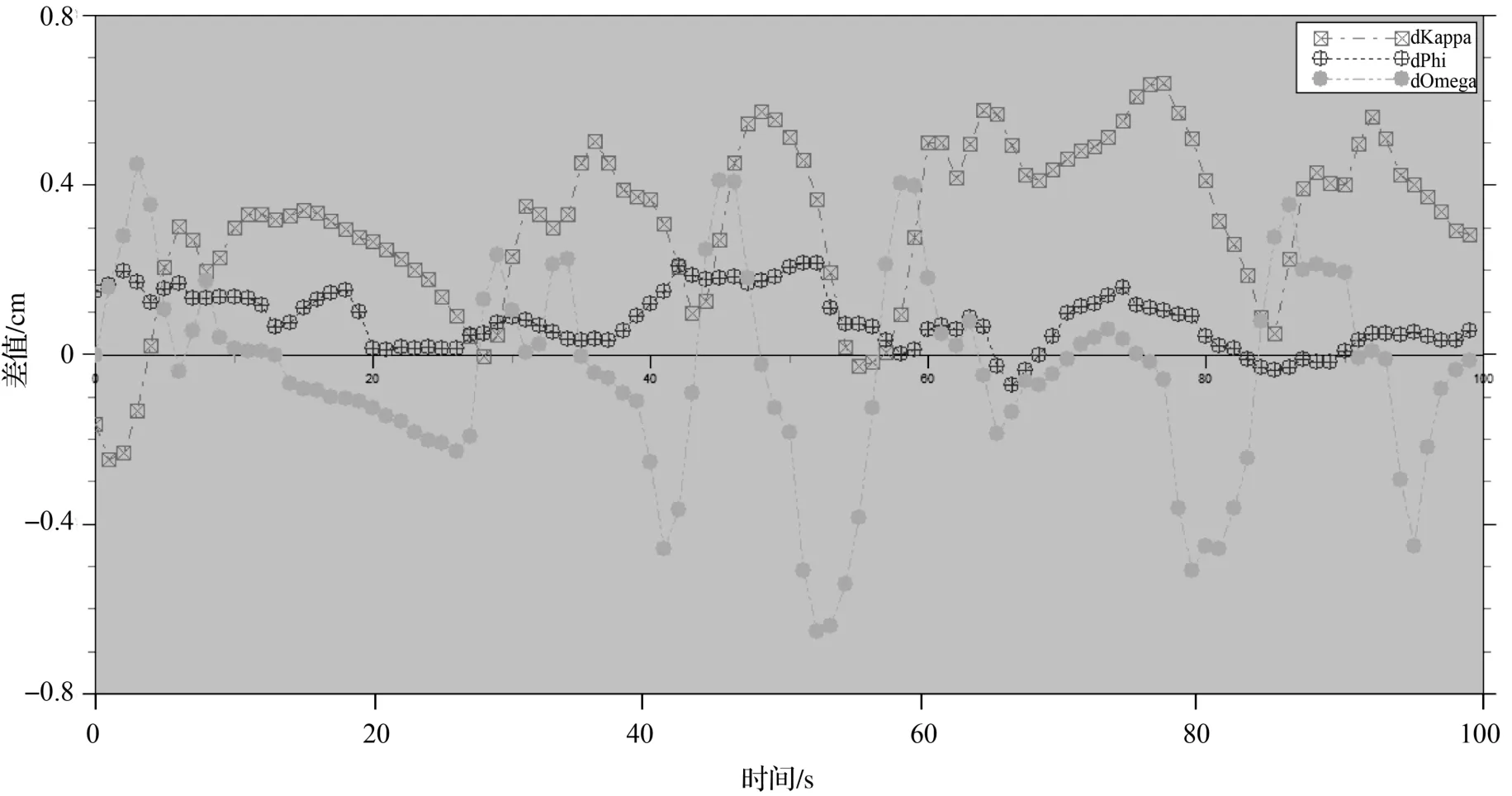
图2 解算外方位角元素与Inertial Explorer输出外方位角元素差值
六、结束语
本文使用POS系统输出的WGS-84参考椭球中的位置与姿态信息,解算车载移动激光扫描系统激光扫描仪的外方位元素。并将解算的结果与商业POS数据处理软件Inertial Explorer解算的结果进行比较,比较结果为外方位线元素的差值不超过0.1 cm,外方位角元素的差值不超过0.8 s。比较结果证明了本文方法的正确性和有效性。
[1]PETRIE G.An Introduction to the Technology Mobile Aapping Systems[J].Geoinformatics,2010,13(1):32-43.
[2]李德仁.移动测量技术及其应用[J].地理空间信息,2006,4(4):1-5.
[3]PUENTE I,GONZÁLEZ H,ARIAS P,et al.Landbased Mobile Laser Scanning Systems:A Review[J]. 2011(XXXVIII-5/W12):163-168.
[4]宁津生.现代大地测量参考系统[J].测绘学报,2002,31(5):7-11.
[5]陈俊勇.中国现代大地基准-中国大地坐标系统2000,(CGCS2000)及其框架[J].测绘学报,2008,37(3):269-271.
[6]BÄUMKER M,HEIMES F J.New Calibration and Computing Method for Direct Georeferencing of Image and Scanner Data Using the Position and Angular Data of An Hybrid Inertial Navigation System[C]∥OEEPE Workshop,Integrated Sensor Orientation.Hannover:[s.n.],2001.
[7]RIEGER P,STUDNICKA N,PFENNIGBAUER M,et al.Boresight Alignment Method for Mobile Laser Scanning Systems[J].Journal of Applied Geodesy,2010,4(1):13-21.
[8]LEGAT K.Approximate Direct Georeferencing in National Coordinates[J].ISPRS Journal of Photogrammetry and Remote Sensing,2006,60(4):239-255.
[9]CRAMER M,STALLMANN D.System Calibration for Direct Georeferencing[J].International Archives of Photogrammetry Remote Sensing and Spatial Information Sciences,2002,34(3/A):79-84.
[10]袁修孝,张雪萍,付建红.高斯-克吕格投影坐标系下POS角元素的转换方法[J].测绘学报,2011,40(3):338-344.
[11]ZHAO H,ZHANG B,WU C,et al.Development of a Coordinate Transformation Method for Direct Georeferencing in Map Projection Frames[J].ISPRS Journal of Photogrammetry and Remote Sensing,2013(77):94-103.
[12]KENNEDY S,HAMILTON J,MARTELL H.Architecture and System Performance of SPAN-NovAtel’s GPS/ INS Solution[C]∥Proceedings of IEEE/ION PLANS 2006.San Diego:[s.n.],2006:23-25.
Direct Determination of Instant Exterior Orientation Parameters for Mobile Terrestrial Laser Scanning System
LI Xiaohong
车载移动激光扫描测量瞬时外方位元素的确定精度决定了直接地理定向的精度。针对车载三维激光扫描测量高精度定位需要及点云无组织特点带来的瞬时外方位元素解算无整体约束条件问题,本文提出一种统一测量基准下的瞬时外方位元素精确直接解算方法,经试验验证,瞬时外方位元素确定精度满足1∶500测图或定位要求。
车载移动激光扫描测量;直接地理定位;瞬时外方位元素;高精度几何定位
P234.5
B
0494-0911(2014)10-0070-04
2014-05-12
李晓红(1966―),男,山西山阴人,硕士,高级工程师,研究方向为航空摄影测量、GIS开发与应用。
李晓红.车载移动激光扫描测量瞬时外方位元素精确直接解算方法[J].测绘通报,2014(10):70-73.
10.13474/j.cnki.11-2246. 2014.0332
