基于PCM-FM遥测信号的多站时差定位技术应用研究∗
2014-08-02王俊峰张金荣
王俊峰, 张金荣
(北京跟踪与通信技术研究所 北京 100094)
基于PCM-FM遥测信号的多站时差定位技术应用研究∗
王俊峰, 张金荣
(北京跟踪与通信技术研究所 北京 100094)
针对飞行目标回收测量问题,首先介绍基于PCM-FM遥测信号的多站时差定位原理,设计一种采用“单星共视授时、遥测帧同步信号采样本地时间、多站时差(距离差)定位解算”技术的定位系统;然后阐述其关键技术,并对距离差测量精度进行分析和估算;最后结合工程实践,给出试验测试数据。
PCM-FM遥测信号; 单星共视授时; 多站时差定位; 测量精度
引 言
目前,在航天试验任务中,目标的飞行轨迹测量主要依靠雷达和光学设备。雷达规模较大,研制经费较高,且机动性较差,布站要求高,难以灵活布设;而光学设备易受云、沙尘等气候条件影响,且视场范围相对较小,目标丢失重捕困难。因此,对于试验场落区目标末端测量,以雷达和光学设备为主的传统测量手段受到不同程度制约,需要一套具有覆盖范围广、捕获信号快、定位简单、布置快捷等特点的新型测量系统。
多站时差定位系统利用目标发射信号到达不同地面站的时间差解算出目标位置。目前,关于多站时差定位技术,已有大量的研究成果[1,2],基于扩频信号的多站时差定位技术已经得到实际应用[3,4]。考虑到试验过程中目标一般都发射PCM-FM遥测信号,本文设计一种基于PCM-FM遥测信号的多站时差定位系统,利用遥测帧同步信号对本地时间进行采样,得到同一帧遥测信号到达不同地面站的时间差,从而解算出目标位置,实现对目标的外测功能。该系统可进一步增强目标回收测量能力,提高目标返回段跟踪测量精度,提升我国试验场测控水平。
1 时差定位测量基本原理
利用目标下行遥测信号实现时差定位测量需多套(4套以上)地面接收站,且各站位置已知。利用各站接收到目标遥测信号的同一帧数据的帧同步到达时间,以其中一站收到的时间为基准,比较其余各站与基准站的到达时间差来进行目标定位,具体定位原理如下。
无线电信号到达时差定位又称为双曲线定位。它是通过处理多个测量站采集到的同一信号到达时间差来对目标进行定位的。具体实现过程中,可以通过测量目标发射遥测信号的某一标识(如帧同步信号)到达各站的时间差来进行定位,通过单向测时,可得到如下一组单程到达时间与距离ri(i=1,2,3,…N)的关系方程组

式中,ti为信号到达各测量站的时间,T0为目标发射信号的时间,ri为目标与第i个测量站之间的距离,c为信号传播速度(即光速)。
设第i个测量站位置(xi,yi,zi)已知,目标位置为(xt,yt,zt),则可得出

为了消去共同分量T0,可以用距离差列出一组时间差测量方程。假设第一套站为测量基准站,可得

将式(2)代入式(3),可得

在各测量站位置(xi,yi,zi)已知,并且至少测得3个时间差的情况下,通过解上述方程组可得目标位置(xt,yt,zt)。
利用测量得到的多个目标位置信息(xt,yt,zt),进行相应的曲线拟合,可得到目标飞行轨迹,直至遥测信号消失。在对返回目标进行测量过程中,可在信号消失后,根据目标飞行轨迹进行一定时间的外推,进而预报返回目标的落点。
2 实现方案
时差定位测量系统是利用时间差来实现对飞行目标的定位测量。系统需要4个以上(含4个)测量站和1个数据处理终端。根据试验场地形条件、目标飞行轨道特点和目标天线的不同,可适当地增加测量站,以提高系统的可靠性和测量精度。每个测量站接收目标发出的PCM-FM遥测信号,经过接收解调后,得到遥测帧(子帧)同步信号,并测量帧(子帧)同步信号到达时间,再将测得的时间数据送到数据处理终端;数据处理终端利用各站送来的遥测帧(子帧)同步到达时间,以某一测量站为基准,求出同一遥测帧(子帧)同步信号到达其它各站与基准站的时间差,从而算出目标到达各站的距离差,再利用该距离差解算出目标位置。系统组成原理如图1所示。
3 关键技术
3.1 时间同步
为了精确测量同一帧(子帧)遥测数据到达各测量站的时间差,各测量站之间必须高精度时间同步,否则,各测量站之间的时间同步误差会对测量精度带来较大影响。为保证各测量站时间同步,各测量站需配备高精度授时分系统,在测量站布站基线小于150km时,可采用“单星共视授时技术”,利用授时型GPS接收机送出的时间信息作为各站的时间基准,使各站的秒以上数字钟同步到GPS时间上,同时利用GPS接收机送出的1PPS秒脉冲信号作为同步信号,同步本地秒以下数字钟,使各测量站的时钟都同步到GPS时间上,保证各站时间同步。当测量站布站基线较长时,可采用双向时间比对授时法,其站间授时误差可达纳秒级[5]。本文主要讨论布站基线长度小于150km的情况,而对于基线长度大于150km的情况,请参考相关资料。
3.2 采样信号同步
飞行目标下行遥测帧(子帧)同步信号具有周期性,为精确完成时差定位解算,数据处理终端处理的多个时间信息必须是同一个遥测帧(子帧)同步信号的采样时间,否则会产生时间模糊问题,导致计算得出的定位结果偏差较大。为解决该问题,可采用如下两种方法:
①在下行遥测数据中有帧(子帧)计数的情况下,在测量站获取帧(子帧)同步信号到达时间的同时提取遥测帧(子帧)计数,两类信息同时送给数据处理终端,由数据处理终端查找同一帧(子帧)计数的时间测量信息进行计算。
②在下行遥测数据中没有帧计数的情况下,可根据遥测码速率和帧(子帧)长,计算出一个遥测帧(子帧)传输时间和该时间段内信号传输距离,并布设测量站间距小于该距离,在数据处理时对于超过一个遥测帧(子帧)传输时间的时间差值予以剔除,从而避免时间模糊问题。例如,某下行遥测码速率为2Mb/s,遥测子帧长为1kb,可得一个子帧传输时间为0.5ms,该时间内遥测信号传输距离为150km,布设测量站间距小于150km,即两站之间的信号传输时间差不大于0.5ms(一个遥测子帧传输时间)。在数据处理时对于两站时间差大于0.5ms的值予以剔除,即可避免同时处理到不同遥测子帧的同步时间信息。
3.3 帧同步
多站时差定位技术测量的是目标发射的遥测帧(子帧)同步信号到达各站的时间差,各测量站必须有相对一致的帧(子帧)同步延时;如果各测量站的帧(子帧)同步延时误差较大,会导致各站采样时间信号的延时误差较大,从而影响到系统测量精度。目前,常用的帧同步信号是帧(子帧)同步码组最后一个码元后沿的时刻,亦即帧(子帧)同步误差为帧(子帧)同步码组的最后一个码元的位同步误差。对于各测量站解调恢复帧(子帧)的设备延时差异,可以在事前通过系统校正用软件加以消除。所余随机的位同步误差也会对系统的测量精度造成较大影响,将在下节中予以分析。
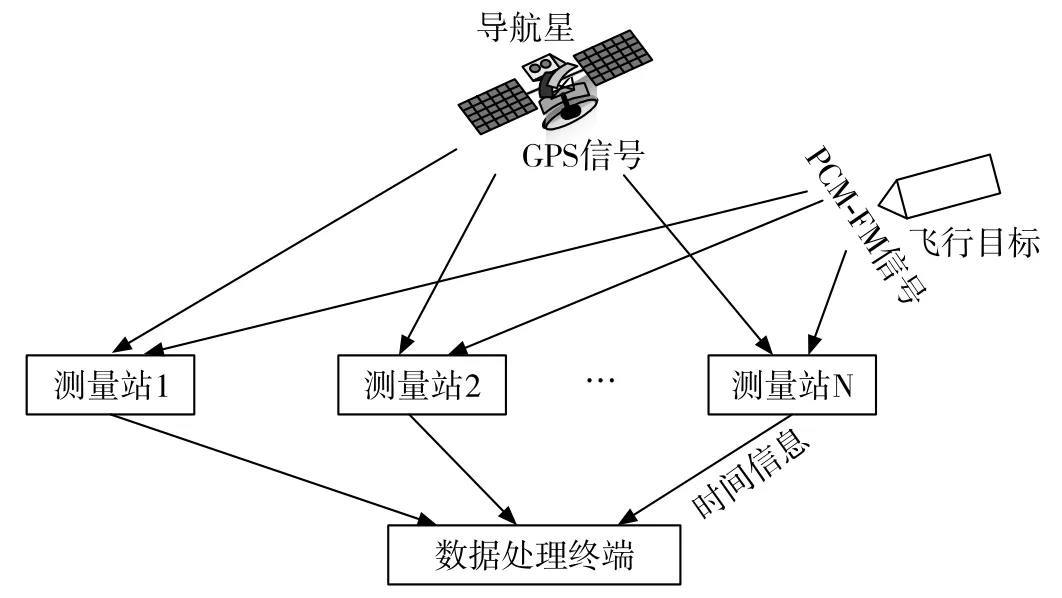
图1 多站时差定位系统组成原理
4 测量精度分析
4.1 距离差测量随机误差
距离差测量随机误差包括位同步误差、站间时间同步误差等。各项误差估算如下。
①位同步误差
码同步器的位同步误差主要是接收机热噪声引起的随机误差,计算公式如下。
由于采用数据转换跟踪环提取定时误差,可得位同步误差为[6]


经计算,对于PCM-FM体制,在Pe=1×10-2时可满足遥测帧(子帧)同步要求,此时所需Eb/N0为 6.6dB,即上式中的为1/4.6,为保证环路的锁定时间和跟踪性能,取为1/1000,可得到=,则有

其中,T为符号周期。即热噪声随机误差约为符号周期的(1/69)。
经计算,在门槛信噪比条件下,对于200kb/s码速率,其位同步误差约为73ns,对应的测量误差为21.9m;对于1Mb/s码速率,其位同步误差约为14.5ns,对应的测量误差为4.35m;对于2Mb/s码速率,其位同步误差约为7.3ns,对应的测量误差为2.19m。
②站间时间同步随机误差
各站采用GPS单星共视技术,站间时间同步随机误差主要为GPS接收机热噪声引入的误差,约为3ns,对应的测量误差为

综上所述,码速率为1Mb/s时,距离差测量随机误差为

4.2 距离差测量系统误差
距离差测量系统误差主要包括站间时间同步误差、接收机通道偏差、电平动态误差、群时延引入的误差、测量站位置误差等。各误差项估算如下:
①站间时间同步系统误差
各站采用GPS单星共视技术,站间时间同步很多公共误差源(如星历误差、钟差、信号传播误差等)的影响大部分可相互抵消,其系统误差主要包括多径效应引入的误差、站址误差、GPS接收机校零残差和信号传播延迟不能抵消的残差。其中,多径效应引入的误差约为5ns,站址误差(1m)引入的定时误差约为3ns,GPS接收机校零残差约为8ns,信号传播延迟不能抵消的残差约为8ns。因此,站间时间同步总误差约为,对应的测量误差为

②接收机通道偏差(校零残差)
接收机通道的固定时延(包括天线、电缆的延迟),可通过校零得到,在软件中予以消除,但校零后仍然存在通道间偏差,根据工程经验,一般为8ns左右,对应的测量误差为

③电平动态误差
接收电平动态范围60dB,对AGC放大器的时延变化有影响,会引入测距系统误差。根据工程经验,AGC放大器的时延变化一般为6ns,则电平动态引起的测量误差约为

④群时延引入的误差
由于温度、电压等因素的变化,引起接收信道中滤波器滤波特性、信道增益、输出功率等变化,使群时延发生变化。信道设备24小时带内群时延变化约4ns,对应的测量误差为

⑤测量站位置误差
由于目标定位解算是以测量站位置坐标为已知条件的,所以测量站位置坐标误差将直接导致定位测量误差。各测量站接收GPS信号进行站址自定位,其定位精度可达

综上所述,距离差测量系统误差为

4.3 定位精度
在工程应用中,距离差测量精度是通过对目标的定位精度体现出来的,常用距离差测量精度与几何精度因子GDOP的乘积来表征定位精度。

几何精度因子GDOP取决于测量站的分布情况、飞行目标相对各测量站的位置等条件,所以在目标飞行过程中,难以给出固定的GDOP值。关于GDOP值的分析计算请参考相关文献[7,8],此处不再赘述。但是,应当充分重视根据预定轨道布置测量站的问题。
在几次试验中,该系统对目标的定位精度为70m左右,结合当时的目标飞行情况、目标遥测信号特性、测量站情况看,通过事后数据分析,距离差测量精度与理论分析结果相符。
5 结束语
本文简述了基于PCM-FM遥测信号的多站时差定位技术的基本原理,提出了采用该技术的时差定位测量系统设计方案,对其测量精度进行了分析,并给出了试验测量结果。理论分析与工程实践结果表明,该技术在不改变目标下行遥测信号状态下,可完成对目标的定位测量。该技术合理可行,并且实现方法简单,布站灵活,可广泛应用于对目标的定位测量中。
[1]王永诚,张令坤.多站时差定位技术研究[J].现代雷达,2003,25(2):1~4.
[2]解 楠.多站时差定位精度分析[J].信息与电子工程,2003,1(3):38~42.
[3]钱卫平,郭军海.多目标遥外参数综合测量系统的设计与试验[J].宇航学报,2005,26:117~120.
[4]孙民华.多目标测量技术[J].飞行器测控学报,2003,22(2):1~6.
[5]刘 利,韩春好.卫星双向时间比对及其误差分析[J].天文学进展,2004,9月.
[6]郭梯云.数据传输[M].北京:人民邮电出版社,1998,478~493.
[7]高 虎,俞志强.基于四站时差定位原理的星型布站分析[J].空军雷达学院学报,2004,18(3):22~24.
[8]杨甲胜,王志刚,孔晓玲.无源到达时差定位技术分析[J].舰船电子对抗,2010,33(5):5~9.
M ulti-site Time Difference of Arrival Localization Technique Based on PCM-FM Telemetry Signal
Wang Junfeng, Zhang Jinrong
Aiming at the orbitmeasurementof re-entry objects,amulti-site time difference of arrival localization system based on PCM-FM telemetry signal is developed.In this system the ground stations are timed by employing a single satellite common-view technique,the local time of every station is sampled by the frame synchronization signal and the location of the object is finally calculated based on the time difference.This paper provides the principle and implementation of the system and declares several key techniques and solutions.Themeasurement accuracy of the range difference is analyzed in theory and the test results demonstrate that the proposed system can acquire promising performance which is coincidentwith the theoretical analysis.
PCM-FM telemetry signal; Single satellite common-view; Multi-site time difference of arrival localization;Measurement accuracy
TN95
A
CN11-1780(2014)06-0056-05
王俊峰 1976年生,硕士研究生,主要研究方向为遥测遥控。
∗国家项目支持
2014-02-19 收修改稿日期:2014-04-22
张金荣 1984年生,硕士研究生,主要研究方向为遥测遥控。