液压式船舶舵机控制系统设计与仿真
2014-08-02陈黎,鲁涛
陈 黎,鲁 涛
(1.重庆财经职业学院,重庆 402160; 2.中国人民解放军91832部队,广东 湛江 524100)
液压式船舶舵机控制系统设计与仿真
陈 黎1,鲁 涛2
(1.重庆财经职业学院,重庆 402160; 2.中国人民解放军91832部队,广东 湛江 524100)
为改善现有舵机技术体积大、定位精度差和控制系统复杂等不足,本文在分析船舶舵机作用原理的基础上,设计一种液压式舵机控制系统。该系统主要由执行机构、驱动系统和控制系统等几部分组成,其控制环节包括输入环节、比例环节、阀控缸环节和转角反馈环节。本文分别给出上述各环节的传递函数、系统传递函数以及系统稳态误差模型。在此基础上,采用模糊自适应PID控制算法在Matlab中的Simulink模块中对上述控制系统进行仿真分析。仿真结果表明,系统稳态误差为0.021,对阶跃信号的响应时间为0.4s,具有较高的快速响应性能和跟随性能,满足实际工况要求。
船舶舵机;模糊PID;液压系统;Simulink仿真
0 引 言
舵机是船舶实现航行方向改变的核心部件,舵机性能的好坏直接影响着船舶的航行安全[1-2]。与舵机的蒸汽传动和电气[3]传动相比,液压传动具有船舶扭矩大、抗干扰能力强、反应灵敏和能耗利用率高等优点[4-5]。为了提高液压系统的安全性,大多数船舶舵机使用2套液压系统,当其中1套管路系统损坏或失油较大时,及时启动另一个管路系统中的液压泵开始工作并采用2个油路自动锁闭阀来隔离失效的管路系统。随着舵机生产技术的发展,舵机的性能正逐步完善,例如阀控型舵机的可用功率在不断增加,驱动舵机的最小液压压力在不断降低等。目前,阀控型舵机的最大公称扭矩已达1 200 kN·m[6]。逻辑阀和比例阀等新型液压元件的出现及应用使得船舶舵机技术得以进一步的提高,使转舵精度达到±1/6°,是基于传统电磁换向阀舵机控制精度的2倍以上。
在控制方式上,传统的PID控制策略不能实时改变控制参数,难以满足系统要求,原因在于舵机系统属于非线性系统且同一船舶在水中不同地点和环境的工况不尽相同。自抗干扰控制和模糊控制是在PID算法的基础上发展起来的[7-10],能够自动补偿系统内部和外部的多个干扰源,适用于船舶舵机的大惯性、非线性和不确定性的控制系统特性,目前被广泛使用。
为改善现有舵机技术体积大、定位精度差和控制系统复杂等不足,应用电液比例阀为主管路液压系统结合模糊PID控制算法进行液压式舵机控制系统的设计及仿真分析。
1 舵机液压控制系统设计
1.1 船舶舵机作用原理
水中舵叶受力情况如图1所示,当舵转角α为0,即舵叶位置为正舵位置时,舵叶两侧所受水的压力(通常称为舵压力)为一对大小相等方向相反的反作用力,使船体保持直行方向;当舵转角α不为0时,舵叶两侧形成合力舵压力FN垂直作用于舵叶,舵压力与舵叶所受水的摩擦力Fr形成合力F, 将F分解为升力FL和阻力FD,其中升力FL与水流方向垂直,FD与水流方向平行。

图1 船舶舵机工作原理Fig.1 The working principle of the ship steering gear
(1)

(2)
x=Cxb。
(3)
式中:CL,CD和CX分别为水流升力、阻力和压力中心系数,是舵角α的函数;A为舵叶的单侧浸水面积;v为舵叶与水相对流动速度;b为舵叶宽度平均值。此时,转船力矩可由下式计算:
Ms=FL(l+Xcconα)+FDXcsinα。
(4)
式中:l为船舶重心和舵中心之间的距离;Xc为水流压力中心与舵中心之间的距离。
由上述分析可知,转船力矩随舵转角的增大而增大,且转船力矩取极大值时的舵角值取决于舵叶的几何形状。
1.2 控制系统设计
船舶舵机系统组成部分主要包括执行机构、驱动系统和控制系统等。本文所用转舵机构为滚珠螺旋传动机构,具有体积小、重量轻和额定负载大等优点。舵机系统如图2所示,主要由输入环节、比例环节、阀控缸环节和转角反馈环节等组成。其中输入和比例环节可表示为:
u1=K1θ1,
(5)
式中K1为舵角测量系数。则比例阀位移大小与输入信号的传递函数如下:

(6)
式中:ωr为因电气产生的转角频率;ω0为弹性系统固有频率;δ0为阻尼系数。

图2 舵机系统简图Fig.2 The diagram of steering gear system
阀控缸活塞位移大小和阀芯开口面积的关系可由式(7)表示:

(7)
式中:Kq为控制阀的增益系数;Ap为液压缸阀杆面积;ωh为液压缸负载固有频率。舵角反馈的目的是将螺旋位移转化为舵机转角数值,可由式(8)表示:
u1=K4K3xp。
(8)
式中:K3为螺旋位移转化为舵机转角的系数;K4为传感器的增益。综合上述各环节的传递函数可得液压舵机控制系统结构如图3所示。

图3 液压舵机控制系统传递函数Fig.3 Hydraulic steering gear control system transfer function
由图3可得液压舵机系统的传递函数为:


(9)
为实现上述控制策略,选用PLC作为舵机液压控制系统的处理器。为提高信号传输的稳定性和实时性,选用现场总线的控制方式,CAN总线还能提高系统的互换性和与模块以外系统的无缝对接性能。
2 舵机液压控制系统建模
液压驱动器驱动舵叶转动实现舵机角度的改变,因此,液压系统的性能尤其是控制精度直接决定了舵角变化精度的高低。为了对系统性能进行定量分析以得到系统性能技术指标,本文进行了上述液压控制系统的建模和仿真。为了便于建模,根据实际工况进行如下简化处理:1)假设液压泵的流量保持不变;2)溢流阀处理出口压力恒定的理想状况;3)忽略液压介质内混入的少量杂质,介质弹性模量不变。根据本文第1节研究结果建立舵机液压控制系统模型,得到系统的稳态误差终值如下:
(10)
由式(10)可知,系统稳态误差随舵叶转动速度的增大而增大,当转叶速度为60 °/s时,稳定误差为0.0201,舵角精度不大于0.6,此时稳态误差可忽略,满足系统的误差要求。上述模型的相关参数如表1所示。

表1 液压式舵机控制系统模型典型参数设置

(11)
则系统的特征方程为:
s6+180s5+1.42×104s4+6×105s3+8×106s2+
6.01×107s+1.3×108=0。
(12)
根据劳斯-赫尔维兹稳定判据可知,该系统稳定。该系统在Matlab中的闭环系统响应特性如图4所示。由图可知,该系统无超调量误差,存在反应时间较长的缺点,需要增加系统矫正环节。
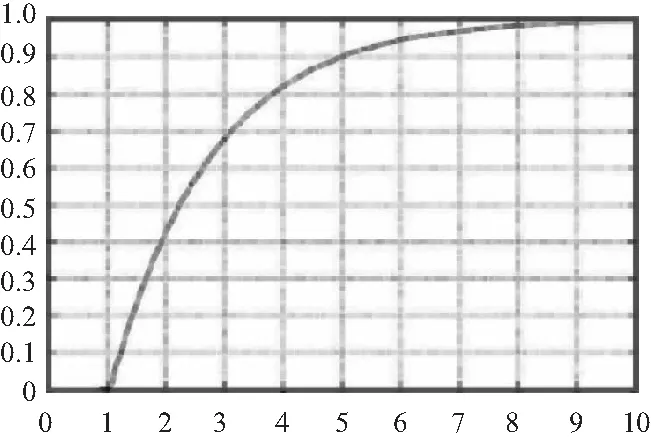
图4 Matlab闭环系统响应特性图Fig.4 The closed-loop system response characteristic by Matlab
3 舵机液压控制系统仿真
模糊自适应PID控制算法中,系统误差和误差变化量均看作模糊控制器的输入量,可以实现实时对PID参数的调整功能。采用模糊控制方法对在线PID输入参数进行实时调节,其调节流程图如图5所示。

图5 模糊PID控制算法流程图Fig.5 The flow chart of fuzzy PID control algorithm
利用Matlab中的Simulink仿真工具进行所设计的舵机液压控制系统的仿真,仿真模型如图6所示,仿真系统包括惯性环节、微分环节和2个震荡环节。其中,舵机控制系统各环节中增益分别为:K1=0.0286 V/o,Ke=4×10-4 m3/(s·A),K2=2.5×103 V/s,K3=386 V/o,K4=0.286 V/o。

图6 控制系统仿真模型Fig.6 The mode of control system simulation
当输入如图7所示的阶跃信号时,响应信号上升时间为0.4 s(见图8),无超调量,输出信号的跟随性能良好。仿真过程中还考察了无PID校正环节时,系统的响应时间为0.7 s。综上所述,采用模糊自适应PID控制算法能够使本文的闭环舵机液压控制系统快速响应性能和跟随性能均得以大大提高,更能适用于本文的液压控制系统,满足实际工况要求。
图7 系统输入阶跃信号Fig.7 Step input signal

图8 系统阶跃信号相应图Fig.8 The figure of step signal corresponding
4 结 语
本文在分析船舶舵机作用原理的基础上,设计了一种液压式舵机控制系统,该系统其控制环节包括输入环节、比例环节、阀控缸环节和转角反馈环节。给出了上述各环节的传递函数、系统传递函数以及系统稳态误差模型。在此基础上,采用模糊自适应PID控制算法在Matlab中的Simulink模块中对上述控制系统进行了仿真分析。仿真结果表明,系统稳态误差为0.021,对阶跃信号的响应时间为0.4 s,具有较高的快速响应性能和跟随性能,非常满足实际工况要求。
[1] 刘颖斌, 王洪利.船舶舵机振荡故障的分析和改造[J].天津航海,2011(4):24-29.
[2] 杨太金.从船舶舵机故障到应急处置成功的思考[J].航海技术,2011(5):74-75.
[3] 谢俊超,肖清,花靖.船用新型电动舵机可行性研究[J].舰船科学技术,2013,35(10):78-81.
[4] NASEEM D, MONIKA I.Energy analysis of an original steering technology that saves fuel and boosts efficiency[J].Energy Conversion and Management,2014,86:1059-1068.
[5] GONG Y, BIAN X, CHEN G.Multi-functional loader steering hydraulic system model construction and simulation based on power bond graphs[J].Procedia Engineering,2011,15:358-364.
[6] 李德远.潜艇舵机液压复合控制技术分析[J].舰船科学技术,2004,26(5):14-16.
[7] 闫飞飞,陈圣东,刘亚丽.基于自抗扰控制器的船舶电动舵机控制系统设计[J].舰船科学技术,2013,35(12):88-91.
[8] 江小霞,朱钰.船舶舵机单神经元自适应PID控制的研究[J].船舶工程,2009,31(4):56-58.
[9] SEO K Y,PARK G K,LEE C S,et al.Ontology-based fuzzy support agent for ship steering control[J].Expert Systems with Applications,2009,36:755-765.
[10] 杨国君.基于模糊PID的液压舵机伺服控制系统研究[J].电脑知识与技术,2014,10(9):2134-2135.
Design and simulation of control system for hydraulic ship steering gear
CHEN Li1,LU Tao2
(1.Chongqing College of Finance and Economics, Department of Applied Design,Chongqing 40216,China;2.No.91832 Unit of PLA,Zhanjiang 524100,China)
To solve the problem of large volume, poor location accuracy and complex controlling system existing in the existing ship steering gears. The working principle of the ship steering gear was firstly researched in this paper. Then a hydraulic ship steering gear controlling system was designed which includes an actuator, a drive system and controlling system. The controlling units include input element, proportioning element, valve element and feedback element of rotor angle. The transfer functions for the above elements and the whole system were presented and steady-state error model as well. Adaptive PID control was adopted to simulate the designed controlling system in the Simulink of Matlab. The simulation results show that the steady-state error of the system is 0.021. The response time for a step-function signal is 0.4s which indicates that the designed control system for hydraulic ship steering gear has the advantages of quick response and following performance. The designed system is satisfied with the the actual demands.
ship steering gear;fuzzy PID;hydraulic system;simulink simulation
2014-07-21;
2014-09-27
重庆市教委教改资助项目(03-3-161)
陈黎(1982-),女,硕士,讲师,研究方向为计算机应用和信息管理。
TH701
A
1672-7649(2014)12-0078-04
10.3404/j.issn.1672-7649.2014.12.017
