不同的自适应卡尔曼滤波在地铁隧道沉降监测数据处理中的应用研究
2014-08-01范雷刚田林亚陈喜凤
范雷刚,田林亚,陈喜凤
(河海大学地球科学与工程学院,江苏 南京 2 10098)
0 引言
地铁投入运营后,由于受列车荷载、周围施工活动等外界因素的影响,极易造成隧道结构沉降、位移、裂缝、倾斜等变形。其中,沉降变形是最关键因素[1]。过大的沉降变形会对地铁隧道的结构防水性能以及耐久性构成威胁。因盾构隧道的纵向刚度较小,当纵向变形或曲率较大时,隧道即可能出现因环缝张开过大而漏水、漏泥或管片纵向受拉破坏等情况[2]。因此,研究和准确预测运营期地铁隧道的沉降变形显得非常重要。
目前,地铁隧道沉降监测数据的处理方法中,时间序列模型、灰色模型、卡尔曼滤波等被广泛应用[3-5],并取得了较好的效果。传统的数据处理方法一般是直接使用实测变形数据建模分析,没有充分考虑观测过程中的各种噪声。卡尔曼滤波虽然能够剔除一部分噪声,但是由于该模型的状态系统噪声和测量噪声都是依靠经验来取值,具有一定的随意性[6],并不一定符合地铁隧道内复杂的实际情况。如果模型的动态噪声判断不准,将会增加状态估计的误差,甚至可能引起滤波发散[7]。自适应卡尔曼滤波能够对观测数据进行递推滤波,同时,对噪声的统计特性进行估计和修正,以减小模型误差,提高预测精度。对于不同的变形监测数据,采用自适应卡尔曼滤波进行数据处理时,还应根据实际情况选择合理的滤波模型。
1 卡尔曼滤波与自适应卡尔曼滤波
1.1 卡尔曼滤波

对于线性离散系统,状态方程和观测方程[8-9]的一般形式为:式中:k为历元时刻;Xk,Xk-1分别为第k期和第k-1期的状态向量;Φk,k-1为第k-1期到第k期的状态转移阵;Ωk为第k期动态噪声向量;Γk,k-1为第k期动态噪声系数阵;Lk,Bk分别为第k期观测向量和第k期观测向量系数阵;Δk为第k期观测噪声。
卡尔曼滤波方程为:
增益矩阵为:

滤波方程及其方差阵为:

1.2 基于方差补偿的自适应卡尔曼滤波
假定{Ωk}和{Δk}为正态序列,X0为正态向量。定义第i步的预测残差[10]为:

式中:Lk+i,k+i/k分别为第k+i期观测值和它的最佳预测值;Vk+i为预测残差。则Vk+i的方差阵为:


又记 E = [Ek+1,…,Ek+N]T,η = [ηk+1,…,ηk+N]T,则有:

N≥r时,有唯一解,diagDΩΩ的LS估计为:

根据以上各式求得任意长度时间段上的DΩΩ,作为动态噪声协方差阵的实时估计。
1.3 基于极大验后估计的自适应卡尔曼滤波
动态噪声向量Ωk、观测噪声向量Δk是互相独立的正态白噪声向量,满足E(Ωk)=q,E(Δk)=r,若噪声的统计特性已知,可由极大验后估计原理得到自适应卡尔曼滤波的递推方程[11]为:

增益矩阵为:

滤波方程及其方差阵为:

若噪声均值向量 q ,r和协方差阵 DΩk,DΔk未知时,可以利用滤波估值j,j和 预报值j,j-1近似代替计算较复杂的平滑估值k,j和k,j-1。
2 实例预测与分析
2.1 工程概况
某市地铁隧道附近需要开挖一超大型基坑,在基坑开挖阶段需要对地铁保护区隧道进行垂直位移监测。采用精密水准仪NⅠ007和二等水准测量方法进行施测,从2013年3月19日至9月15日,每周观测一次,一共观测18期。由于监测点较多,本文只列出靠近基坑侧下行线的部分隧道沉降监测点。下行线隧道内沉降监测点布置如图1所示,其中JX1—JX5为位于变形区域之外的基准点,X3—X13为位于变形区内的沉降监测点。

图1 下行线隧道沉降监测点布置示意图Fig.1 Layout of monitoring points of down line tunnel
2.2 数据处理
本文使用变形区内X3—X13点进行沉降预测与分析。首先根据前2期沉降监测数据建立滤波模型[12],然后利用前16期数据,分别采用卡尔曼滤波、基于方差补偿的自适应卡尔曼滤波和基于极大验后估计的自适应卡尔曼滤波对第17期数据进行预测,又以第17期的预测结果为已知数据预测第18期数据。将预测值与实测值进行比较,结果分别如表1和表2所示。

表1 监测点第17期预测值与实测值比较Table 1 Comparison between prediction results and monitoring data in the seventeenth stage

表2 监测点第18期预测值与实测值比较Table 2 Comparison between prediction results and monitoring data in the eighteenth stage
2.3 数据分析
将表1和表2中的预测值与实测值之差绘制成残差图,分别如图2和图3所示。

图2 第17期3种模型预测值残差对比Fig.2 Comparison of predicted residuals obtained by three different models in the seventeenth stage
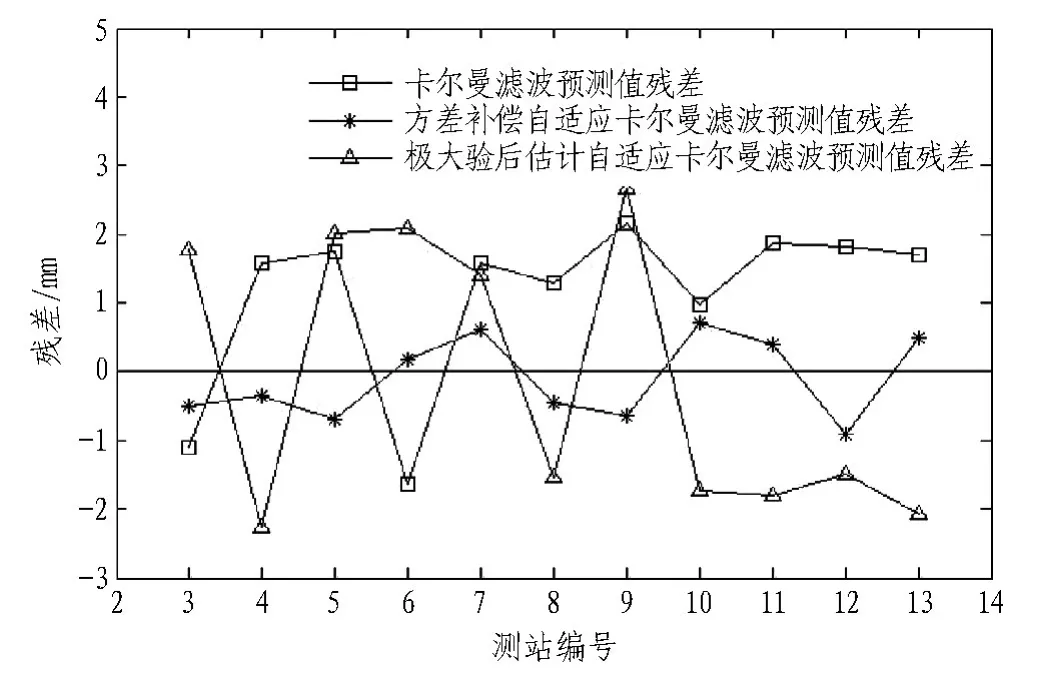
图3 第18期3种模型预测值残差对比Fig.3 Comparison of predicted residuals obtained by three different models in the eighteenth stage
由表1和图2可以看出:在第17期沉降预测时,卡尔曼滤波预测残差除X7点较大外,其余点预测的残差均小于1 mm,预测残差中误差为0.72 mm;方差补偿自适应卡尔曼滤波预测残差均较小,预测残差中误差为0.34 mm;极大验后估计自适应卡尔曼滤波预测残差均较大,大部分点预测残差均大于1 mm,预测残差中误差为1.39 mm。
由表2和图3可以看出,在第18期的沉降预测中,卡尔曼滤波和极大验后估计自适应卡尔曼滤波预测残差均较大,绝大部分点的预测残差达到了1 mm,中误差分别达到1.62 mm和1.93 mm。根据相关规定,测点允许的最大沉降变形为±3 mm(当超过该值时需报警),此时预测残差太大,该模型已经不适合使用。而方差补偿自适应卡尔曼滤波预测残差仍然比较小,预测残差为0.57 mm。
3 结论与讨论
1)当预测时间较短,卡尔曼滤波和方差补偿自适应卡尔曼滤波的预测精度都比较高,可以满足地铁隧道变形预测的要求。当预测时间较长时,只有方差补偿自适应卡尔曼滤波预测精度较高。
2)极大验后估计的自适应卡尔曼滤波2期预测精度都比较低,这表明,不同的工程应通过比较来选用不同的自适应卡尔曼滤波模型。经过比较分析,该工程适合使用基于方差补偿的自适应卡尔曼滤波进行数据处理。
3)本文仅比较了2期的预测结果,对3种模型在更长时间内的预测精度对比分析没有进行研究,尚需进一步探索和完善。
[1]陈喜凤,刘岭,黄腾.基于蚁群算法的地铁隧道沉降预测研究[J].隧道建设,2013,33(6):462-468.(CHEN Xifeng,LⅠU Ling,HUANG Teng.Study on settlement prediction of Metro tunnels based on ant colony algorithm[J].Tunnel Construction,2013,33(6):462-468.(in Chinese))
[2]郑永来,韩文星,童琪华,等.软土地铁隧道纵向不均匀沉降导致的管片接头环缝开裂研究[J].岩石力学与工程学报,2005,24(24):4552-4558.(ZHENG Yonglai,HAN Wenxing,TONG Qihua,et al.Study on longitudinal crack of shield tunnel segment joint due to asymmetric settlement in soft soil[J].Chinese Journal of Rock Mechanics and Engineering,2005,24(24):4552-4558.(in Chinese))
[3]徐爱功,李娜,张涛.时间序列分析在地铁沉降观测中的应用[J].测绘科学,2013,38(5):57-60.(XU Aigong,LⅠNa,ZHANG Tao.Application of time series analysis in subway settlement observation[J].Science of Sur-veying and Mapping,2013,38(5):57-60.(in Chinese))
[4]王元东,唐益群,李仁杰.地铁荷载下隧道土体沉降的灰色预测与分析[J].路基工程,2010(5):4-7.(WANG Yuandong,TANG Yiqun,LⅠRenjie.Gray prediction and analysis on tunnel soil settlement under Metro load[J].Subgrade Engineering,2010(5):4-7.(in Chinese))
[5]徐亚明,刘冠兰,柏文锋.顾及基坑施工影响的地铁区间隧道结构卡尔曼滤波预报模型[J].武汉大学学报:信息科学版,2013,38(11):1322-1325.(XU Yaming,LⅠU Guanlan,BAⅠWenfeng.Kalman filter model considering pit construction simulation evaluation for tunnel deformation prediction[J].Geomatics and Ⅰnformation Science of Wuhan University,2013,38(11):1322-1325.(in Chinese))
[6]郭应时,王畅,张亚岐.噪声方差对卡尔曼滤波结果影响分析[J].计算机工程与设计,2014,35(2):641-645.(GUO Yingshi,WANG Chang,ZHANG Yaqi.Analysis of noise variance’s effect on Kalman filter result[J].Computer Engineering and Design,2014,35(2):641-645.(in Chinese))
[7]许阿裴,归庆明,韩松辉.卡尔曼滤波模型误差的影响分析[J].大地测量与地球动力学,2008,28(1):101-104.(XU Apei,GUⅠQingming,HAN Songhui.Analysis of model error effect on Kalman filtering [J].Journal of Geodesy and Geodynamics,2008,28(1):101-104.(in Chinese))
[8]崔希璋,於宗俦,陶本藻,等.广义测量平差[M].北京:测绘出版社,1992.
[9]何秀凤.变形监测新方法及其应用[M].北京:科学出版社,2007.
[10]高雅萍,张勤.方差补偿自适应卡尔曼滤波在GPS滑坡监测中的应用研究[J].水土保持研究,2008(6):150-152.(GAO Yaping,ZHANG Qin.The application of self adapting Kalman filtering in landslides monitoring based on GPS[J].Research of Soil and Water Conservation,2008(6):150-152.(in Chinese))
[11]赵琳,王小旭,孙明,等.基于极大后验估计和指数加权的自适应UKF滤波算法[J].自动化学报,2010(7):1007-1019.(ZHAO Lin,WANG Xiaoxu,SUN Ming,et al.Adaptive UKF filtering algorithm based on maximum a posterior estimation and exponentialweighting [J].Automatica Sinica,2010(7):1007-1019.(in Chinese))
[12]许国辉,余春林.卡尔曼滤波模型的建立及其在施工变形测量中的应用[J].测绘通报,2004(4):22-23,42.(XU Guohui,YU Chunlin.Establishment of Kalman filtering model and its application in construction deformation measurement[J].Bulletin of Surveying and Mapping,2004(4):22-23,42.(in Chinese))
