风机塔筒攀爬清洗机构附着技术的研究*
2014-07-31王景奕
王景奕,刘 洁
(长春理工大学 机电工程学院,吉林 长春 130022)
风机塔筒攀爬清洗机构附着技术的研究*
王景奕,刘 洁
(长春理工大学 机电工程学院,吉林 长春 130022)
以大型风力发电设备的风机塔筒为实际应用载体,结合风机塔筒的尺寸结构及特殊的外部环境,通过介绍以往各国研制的攀爬机构所应用的附着技术,对攀爬清洗机构的附着机理进行研究,并根据力学原理建立起附着受力的力学模型,在分析一些目前应用较多的附着技术及相关原理的基础之上,研究出一种应用附着技术的正六边环型框架丝杠机械夹紧机构,该机构采用环型双层框架结构,使机构的附着能力得到提升和稳定,利用丝杠连杆的伸缩来达到夹紧的目的。
风机塔筒;攀爬清洗机构;附着技术;机械夹紧;环型丝杠
1 引 言
21世纪是可再生能源的世纪,节能环保已经成为当今时代的主题,由于风能资源非常丰富,所取容易且不会枯竭,所以风能发电一直是世界上增长最快的可再生资源。现在,越来越多的大型风机发电设备竞相出现,高耸庞大的风机塔筒设备成为其主要设备,如图1所示。然而,由于风能发电的外部环境十分恶劣,常年饱受雨雪风沙的侵蚀,已经严重侵害了风机发电设备的使用寿命。因此,对风机塔筒的清洗已变得至关重要。而如今,风机塔筒的清洗方式仍旧依赖于人工悬吊的方式,如图2所示。

图1 风机发电设备 图2 人工悬吊清洗方式
因此,需结合各种诸多清洗机器人来研究出一种能代替人工清洗的智能自动化的攀爬清洗机构,从而来完成对风机塔筒的清洗工作。然而,研究这种机构首先要考虑机构的附着技术。笔者正是结合风机塔筒的独特结构及其外部环境的影响,分析各国的附着技术,来研究出一种适用于风机塔筒的附着技术。
2 攀爬清洗机构附着技术综述
早在20世纪90年代,各工业发达国家纷纷投入大量的人力物力,对攀爬清洗机构的附着技术进行了理论和技术的研究,与此同时,也相继出现了一些攀爬移动的机器人。
1990年初,在四足步行机器人的基础上,日本东京工业大学的宏濑茂男等研究员研究出了NINJA系列的四足壁面移动机器人[1-2],如图3所示。NINJA系列的四足壁面移动机器人采用的是单吸盘式的吸附技术。图4为1991年日本清水建设株式会社研制的用于玻璃清洗壁面移动的机器人[3],其附着技术采用真空吸附技术。
随后不久,日本宫崎大学的西亮教授,又设计了一种使用螺旋浆推进附着技术的壁面移动机器人[4],如图5所示。而日本技术开发研究所研制的多用途壁面机器人[5],采用的是磁吸附技术,磁性的车轮吸附设计能够使机器人可越过接缝和一定高度的台阶。
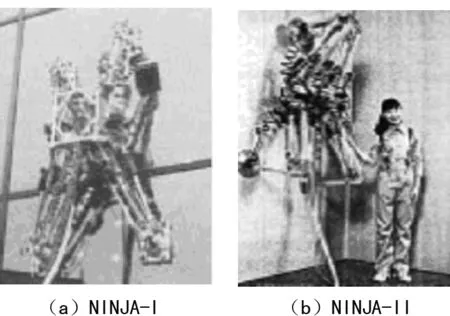
图3 NINJA 系列机器人

图4 玻璃清洗机器人 图5 旋翼式机器人
英国的Portmouth大学于1998年开发了一种框架式结构多吸盘壁面爬行机器人,开发这种机器人是为了检查及清理核电站里面煤气管道的连接段[6]。其中机器人直线运动和旋转运动是通过框架与框架的相互运动来完成的,再加上采用伺服电动机来驱动内外框之间的运动,从而使其目标的定位功能得到大幅度的提高。
相对我国而言,哈尔滨工业大学研制的单车体壁面移动机器人[7]和北京航空航天大学研制的双吸盘结构的履带式机器人[8],均采用的是负压吸附技术。
近年来,随着生物科技技术的快速发展,壁面移动机器人又不断出现一些新的研究[9-10],许多科研人员开始尝试利用纳米技术来探索新的领域。其中,最有成果的研究报告是波特兰刘易斯克拉克学院(Lewis&Clark College)的Kellar Autumn提出的,研究报告表明:由于壁虎的足端与墙壁之间间隙特别微小,能够产生分子作用力,所以壁虎能够平稳地吸附于任何壁面,这种分子力被专家命名为范德华力[11],壁虎通过对壁面压力及与接触面面积的控制,来产生大小不同的吸附力,从而实现壁虎足端对墙壁的吸附和脱开。基于对壁虎爬墙的研究分析,Kellar Autumn应用这种原理研制了一种用于壁面移动机器人的仿生壁虎足端,如图6所示。
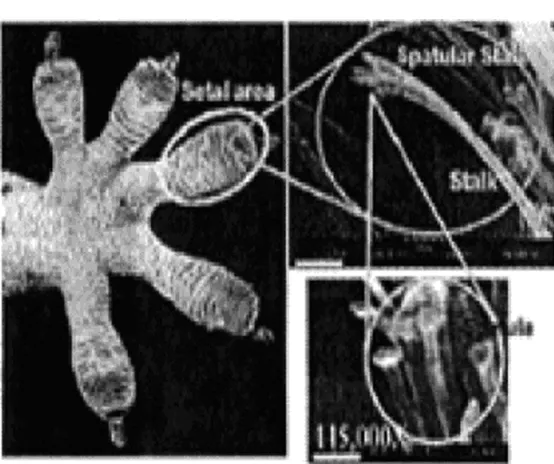
图6 仿生壁虎足端
3 附着机理
攀爬清洗机构在正常的工作状态下是平稳驻留在筒壁上的,并且,在风力发电场外部环境等条件下,机构必须能克服一定的外力干扰,使其保持着附着状态,从而才能完成正常的工作。针对攀爬清洗机构附着在风机塔筒壁的情况下进行分析,机构可能会表现出滑落的失效形式。滑落失效是指攀爬清洗机构的附着面不脱离开筒壁面,但是却沿着筒壁面直线下落。根据工程力学理论原理对滑落这种失效形式做进一步分析,产生滑落失效的最大原因是机构的附着夹紧力不足,该机构利用步进电机所产生的驱动力,通过丝杠传动产生夹紧块对壁面压力,同时也伴随着摩擦力。只有当摩擦力远大于机构重力时,才能使机构平稳的驻留在壁面上,因此,解决滑落失效的最直接途径是使机构拥有足够大的夹紧力,即足够大的步进电机驱动力。根据对上述附着机理的研究分析,笔者将通过对机构建立力学模型来进一步分析机构在攀爬时的附着条件。
4 攀爬清洗机构附着受力的力学模型分析
研究分析攀爬清洗机构的附着受力问题之前,需根据特定的工作环境,对将要建立的力学模型假设两点前提条件,从而达到简化力学理论模型的目的。
假设前提条件:①把攀爬清洗机构看作是一个刚体来进行力学分析;②把机构在水平方向即X方向的受力情况看作是平衡状态,可忽略不计。在满足这两点前提条件下,结合攀爬清洗机构附着在壁面的实际状态,建立起机构附着受力的力学模型。假设攀爬清洗机构其中一个夹紧块以速度v沿筒壁面做匀速直线运动,其受力情况(忽略外界阻力)如图7所示,其中,夹紧块底部与筒壁面接触点为O1,它是夹紧块产生弯矩的中心点。
根据力学原理运动平衡条件可得出:
(1)
将图中假设的各参数带入平衡方程式(1)中得:
(2)
式中:G为机构自身重力,N;P为机构附着力(夹紧力),N;N为筒壁对夹紧块的支持力,N;F为机构运动的驱动力,N;M为N,P向夹紧块重心简化时,对O1点的附着力矩,Nm;α为筒壁面与水平面的夹角。

图7 力学模型
(3)
由于本机构为六边型框架结构,故总的机械夹紧力应为:P总=6P
(4)
只有当机构满足了P总时,机构才能平稳的驻留在壁面上。
如图7所示,对力学模型进行分析,机构自身的重力可在图示坐标轴上分解为沿Y轴和Z轴两个方向的分力。在受力平衡状态下,重力在Y轴方向上的分力由机构运动的驱动力来平衡,而重力所产生的弯矩则是由附着力矩M来平衡。然而,在实际中,机构还会被附着攀爬过程中所受到的外界干扰力和机构本身驱动装置所带来的惯性等因素影响,因此,机构在实际应用中所受到的驱动力要远比公式中所得数值大的多。在不考虑摩擦力的前提下,应当把握住机构驱动装置所带来的附着力,而附着力矩M通过公式可知,要把握机构的尺寸结构和附着技术两个问题。因此,机构驱动装置所带来的附着力,机构的尺寸结构与机构攀爬的附着技术这三个关键性因素是研究风机塔筒攀爬清洗机构的附着技术问题时,所需考虑和深究的。
5 攀爬清洗机构附着状态稳定性的分析
通过对攀爬清洗机构附着机理,附着受力情况及附着技术的研究,可分析出影响机构附着稳定性的两点因素:①筒壁表面可能会出现局部缺陷,或者在清洗过程中,清洗液或污染物等可能会夹紧块的摩擦系数降低,将直接导致附着状态不稳定;②机构本身自带的驱动装置会产生一定的振动和惯性力及在清洗过程中产生的清洗力等也会对机构攀爬的附着稳定性产生影响。因此,根据上述的分析可知,在设计附着技术时,要充分考虑各因素之间的影响,才能保证机构附着的稳定性、可靠性。
6 结 论
通过对风机塔筒攀爬清洗机构附着技术的深入研究,再结合风机塔筒所处环境及塔筒圆锥结构的特点,研究出一种应用附着技术的正六边环型框架丝杠机械夹紧机构。由于风机塔筒的筒壁为圆锥结构,但倾斜角度几乎为零,可看作是圆柱体结构,故采用连接方式最稳定且牢固的正六边环型结构,需将正六边环型的结构尺寸设计到与圆柱体底圆外切圆大小即可,这样就可满足框架环绕筒壁附着的稳定性;然后通过丝杠连杆机构来控制环型结构的尺寸大小,使其可通过导柱自由伸缩,从而达到对筒壁的紧密附着;再利用液压油缸作为驱动伸缩动力装置,通过驱动伸缩来促使机构上下反复循环攀爬,同时增大攀爬机构的附着力,从而使得攀爬清洗机构能够稳定可靠的附着在塔筒上。
[1] Torsten Bohme, Ulrich Schmucker,Norbert Elkmann,Mario Sack. Service Robots for Façade Cleaning[J].IEEE,1998,180:1204-1207.
[2] Saridis D R. Toward the Realization of Intelligent Control[J].Proceedings of the IEEE, 1979,67(8):1115-1120.
[3] Bahr B, Wu F. Design and Safety Analysis of a Portable Climbing Robot[J].Internation Journal of Robotics and Automation.1994,9(4):160-166.
[4] NISHI A, MIYAGI H.Mechanism and Control of Propeller Type Wall-Climbing Robot[J]. IEEE/RSJ/GI International conference on Intelligent Robots and System.IEEE 1994,3:1724-1729.
[5] Autumn K, Liang Y A, Hsich T, Zesch W, Zesch W, Chan W P, Kenny T, Fearing R,Full R J. Nature[J].2000,(405):681-685.
[6] White,Tim.The Design and Operation Performance of a Climbing Robot Used for Weld Inspection in Hazardous Environments.Proc.of the 1998 IEEE int.conf[J].On control applicationa,1998,451-455.
[7] 刘淑霞,王 炎.爬壁机器人技术的应用[J].机器人,1999,21(2):193-199.
[8] 王 巍,宗光华.一种新型机器人的机构稳定性分析[J].机器人.1999,21(7):642-648.
[9] Salisbury K J,Mason M T. Robot Hands and the Mechanics of Manipulation[J]. MIT Press, Automatic Control, IEEE Transactions on, 1986, 3(9):879- 880IEEE.
[10] Sitti M, Fearing R S. Proceedings of the National Academy of Sciences of the United States of America[J]. 2002,99(19):137-140.
[11] Israelachvili J. Intermolecular and Surface Forces[M]. Academic Press, London,1992.
Study on the Attaching Technology for Climbing Cleaning Mechanism of the Wind Turbine Tower
WANG Jing-yi, LIU Jie
(ChangchunUniversityofScienceandTechnology,MechanicalandElectricalEngineeringCollege,ChangchunJilin130022,China)
With large wind power generation equipments of fans tower drum for practical application carrier, combining with the size of the fan tower drum structure as well as the special external environment, through introducing the attaching technology that the developed countries ever used,the attaching mechanism of climbing cleaning institutions is discussed in the paper, and according to the principle of mechanics,the mechanical model of the mechanical is established based on mechanics principle. On the basis of analyzing the present application in some more attaching technology and relative principle, a technology that applies the six ring frame type ball screw machinery clamping agency is researched, the agency adopts ring type double frame structure, the adhesion ability of this mechanism is improved, and achieves the purpose of clamping using ball screw expansion of connecting rod.
fan tower drum;climb cleaning institutions;attached to the technology;Mmechanical grip;ring type ball screw
2013-12-06
王景奕(1964-),男,吉林长春人,副教授,硕士,主要从事机械设计及检测方面的工作。
TH136
A
1007-4414(2014)01-0012-03
