船舶航向非线性反演自适应滑模控制
2014-07-31王仁强陈进涛
王仁强,陈进涛
(江苏海事职业技术学院 航海技术系,江苏 南京 211170)
船舶航向非线性反演自适应滑模控制
王仁强,陈进涛
(江苏海事职业技术学院 航海技术系,江苏 南京 211170)
为实现船舶在大幅度改向操纵运动中航向准确快速跟踪控制,采用Bech船舶操纵运动数学模型精确描述船舶运动性能。考虑到船舶运动中固有的非线性、模型不确定性和风、浪、流等干扰影响,设计一种船舶航向非线性自适应滑模控制器。利用反演法将滑模控制技术与自适应控制技术相结合设计航向改变控制算法,借助Lyapunov稳定性定理证明控制系统渐近稳定,并进行船舶航向控制仿真。仿真结果表明,本文所设计的船舶航向改变控制器性能优良,控制舵角合理,控制输出航向对本船参数摄动及外界干扰不敏感,具有较强的鲁棒性。
Bech模型;反演法;自适应;Lyapunov;滑模控制
0 引 言
船舶运动具有大惯性、大时滞、非线性等特点,船舶在海上航行时经常会受到风、浪等强干扰的影响,此时,传统的PID控制规律已不能较好地对船舶航向进行跟踪控制。20世纪60年代诞生的滑模变结构控制理论[1]为船舶运动的非线性、不确定性控制提供了有效的解决方法,这种方法通过控制量的切换使船舶运动系统状态沿着滑模面滑动,使船舶运动系统在受到参数摄动和外界干扰时具有不变性。
然而,文献[2-5]都是基于2阶野本模型,该模型只适应于在平衡位置做小偏移的操纵运动,当船舶进行大幅度航向改变操纵时,2阶野本模型就不能够精确的描述船舶实际的运动性能。鉴于此,本文采用适用范围更广的Bech模型[6],在利用Lyapunov稳定性的基础上,结合变结构滑模控制强鲁棒性特点,利用反演设计方法设计一种船舶航向改变自适应滑模控制算法,从而实现船舶在大幅度改向操纵运动中航向准确快速跟踪控制。通过与传统PID控制仿真比较,得出本文所设计的船舶航向控制效果理想,具有较强的抗干扰性能。
1 船舶运动非线性数学模型
20世纪50年代,日本学者野本谦作[6]从控制理论的角度出发,建立基于舵角输入、航向输出的响应型船舶操纵运动数学模型,该模型的数学表达式为:

(1)
式中:T1,T2和T3为2阶野本模型的追随性指数;K为旋回性指数。
然而,式(1)描述的船舶操纵运动方程只适用于航速稳定、在平衡位置做小偏移的运动,并不适用于大幅度的航向改变操纵。为此,Bech等在2阶野本模型的基础上发展了适用于大幅度航向改变操纵,同时又可解释航向不稳定等非线性现象的船舶操纵运动数学模型,其数学表达式为:

(2)

作如下设定:

当船舶受到外界干扰,船舶系统参数(操纵性指数K,T)变化时,式(2)可变换为:

(3)
式中Δa和Δb为系统参数不确定部分。
作如下设定:

那么式(3)可写成下列形式:
(4)

从式(4)可以看出,本文的设计目标为寻求控制规律u,使系统输出y渐近跟踪航向期望值φr,即当t→∞时,跟踪误差e=y-φr→0,从而实现航向改变操纵的准确快速跟踪控制。
2 船舶航向非线性反演自适应滑模控制器的设计
针对船舶操纵系统,本文提出的船舶航向改变控制器的设计步骤如下:
第1步:定义误差变量,构造滑模面。
针对系统构造如下滑模面:
(5)
式中:φr为期望航向;σ1,σ2为虚拟镇定函数;z1为航向误差。
第2步,利用反演法,构造Lyapunov函数证明控制系统渐近稳定。
构造第1个Lyapunov函数:

(6)
由式(5)可知:

对式(6)两端求导,有:

(7)
令

(8)
代入式(7),有:

(9)
考虑到式(7)和式(9),得到:

(10)
将式(10)代入式(8),可得:

(11)
同样的,根据式(5)可得:

(12)
构造第2个Lyapunov函数:
(13)
对式(13)两端求导,有:

(14)
令

(15)
代入式(14),有

(16)
考虑到式(12)和式(15),得到:

(17)
将式(11)和式(17)代入式(13),可得:

(18)


(19)

根据式(5),得到:

(20)
对式(19)两端求导,有:

(21)
针对式(21),为使控制系统渐近稳定,设计自适应控制规律为:
(22)
式中k1,k2,k3,β均为正数。
3 仿真研究
以大连海事大学教学实习船“育龙”轮为例进行仿真研究。该轮Bech模型的相关参数为:T1·T2=9.238,T1+T2=23.944,K=7.926,T3=10.064,α0=0,α1=1,α2=0,α3=30。应用Matlab/Simulink平台设计了系统的船舶航向非线性反演自适应滑模控制仿真程序,船舶初始航向000,期望航向改变值φr=030,将外界干扰ω等效为ω=0.01+0.01sin(πt),与传统PID控制进行仿真比较,利用遗传算法[9]在线自动寻优求取“育龙”轮PID控制参数:Kp=7.5,Kd=0.001,Ki=83.5。仿真对比结果如图1和图2所示。
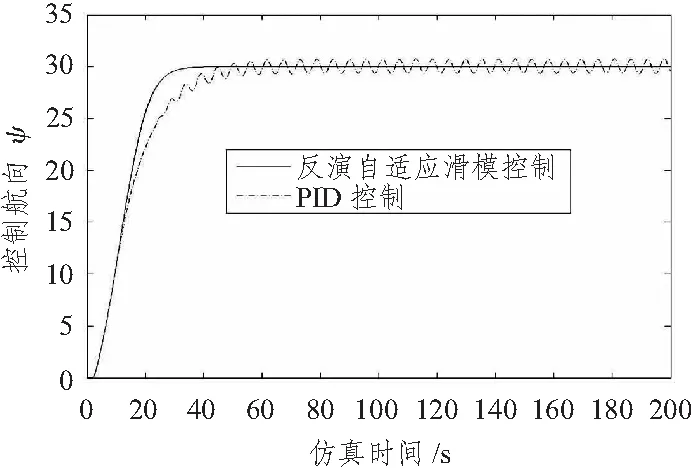
图1 存在干扰,预期改向30°时航向角输出曲线Fig.1 The output of ship course with disturbances when expected course change is 30°
由图1可以看出,反演自适应滑模控制器具有较快的响应速度和较好的跟踪能力,且航向平稳;PID控制器虽然也可以跟踪航向角,但是与反演自适应滑模控制器相比具有较大的超调量,并且控制航向对外界干扰较敏感,航向角左右摇摆,控制性能不理想。
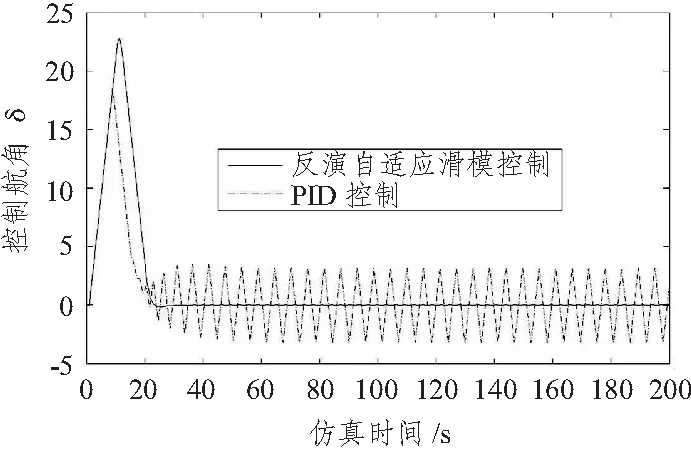
图2 存在干扰,预期改向30°时舵角输出曲线Fig.2 The output of rudder angle with disturbances when expected course change is 30°
从图2可以得出,PID控制器舵角输出抖振比较严重,控制舵角摆动较大,长时间工作容易造成舵机损坏;而反演自适应滑模控制器舵角输出光滑,基本能够保证不用操舵也可以稳定跟踪航向。总的来说,本文设计的控制器具有较好的控制效果,抗干扰能力强,具有较强鲁棒性。
4 结 语
本文从Bech船舶运动数学模型的角度出发,考虑船舶参数变化和外界干扰的影响,利用Lyapunov稳定性理论,结合变结构滑模控制方法和自适应控制技术,利用反演方法设计一种船舶航向改变自适应滑模控制算法,并给出其设计流程。以大连海事大学实习船“育龙”轮为例进行仿真研究,与传统PID控制比较可知,本文所设计的船舶航向反演自适应滑模控制算法的控制效果理想,具有较强鲁棒性。
[1]LINFJ,CHOUWD.Aninductionmotorservodriveusingsliding-modecontrolwithgeneticalgorithem[J].ElectricPowerSystemResearch,2003,64(2):93-108.
[2] 张显库.基于Lyapunov稳定性的船舶航向保持非线性控制[D]. 西南交通大学学报,2010.
[3] 王林,陈楠,高嵬.基于Backstepping的船舶航向自适应滑模控制[J].船电技术,2012.
WANGLin,CHENNan,GAOWei.Backsteppingbasedshipheadingadaptiveslidingmodecontrol[J].ShipPowerTechnology,2012(4):20-22.
[4] 卜仁祥,刘正江,李铁山.迭代滑模增量反馈在船舶航向控制中的应用[J].哈尔滨工程大学学报,2007(3):26-30.
BURen-xiang,LIUZheng-jiang,LITie-shan.Iterativeslidingmodeincrementalfeedbackshipcoursecontrol[J].JournalofHarbinEngineeringUniversity,2007(3):26-30.
[5]CHEEPT,CHRISTOPHERE.Slidingmodeobserversforreconstructionofsimultaneousactuatorandsensorfaults[C].Proceedingsofthe42ndIEEEConferenceonDecisionandControlMauiHawaiiUSA,2003:1455-1460.
[6] 贾欣乐,杨盐生.船舶运动数学模型[M].大连:大连海事大学出版社,1999.
[7] 袁雷,吴汉松.船舶航向非线性系统的多滑模自适应模糊控制[J].智能系统学报,2010(4):30-34.
YUANLei,WUHan-song.Shipcoursenon-linearsystemslidingmodeadaptivefuzzycontrol[J].IntelligentSystems,2010(4):30-34.
[8]LINFJ,SHENPH,HSUSP.Adaptivebacksteppingslidingmodecontrolforlinearinductionmotordrive[J].IEEEProceedingElectricalPowerApplication,2002,149(3):184-194.
[9] 刘金琨.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2003.
Ship course nonlinear adaptive sliding mode control based on backstepping
WANG Ren-qiang,CHEN Jin-tao
(Department of Navigation, Jiangsu Maritime Institute,Nanjing 211170,China)
In order to achieve ship course fast and accurate tracking control when changing course significantly,the Bech ship maneuvering mathematical model is used to accurately describe ship maneuvering performance,considering the nonlinear characteristics,modeling uncertainties and external disturbances such as wind,wave and flow in ship motion,a ship course nonlinear sliding mode controller is designed in this paper.Combining sliding mode control technology with adaptive control technology to design ship course control algorithm based on backstepping, utilizing Lyapunov stability theorem to prove the control system is asymptotically stable and ship course control simulation is carried out.The simulation result shows that the controller,whose rudder angle is reasonable and course is not sensitive, devised in this paper has superior performance and strong robustness.
bech model;backstepping;adaptive;lyapunov;sliding model control
2013-04-26;
2013-05-28
江苏省教育科学“十二五”规划重点课题(B-a/2011/03/008);江苏省高校大学生实践探究训练计划课题(2012JSSPITP3772)
王仁强(1986-),男,硕士,研究方向为船舶操纵与避碰技术、船舶运动与控制技术。
U666.153
A
1672-7649(2014)03-0136-03
10.3404/j.issn.1672-7649.2014.03.028
