基于最佳阈值分割的舰船目标检测方法*
2014-07-30王保云杨昆
王保云, 杨昆
(1.云南师范大学 信息学院,云南 昆明650500;2.西部资源环境地理信息技术教育部工程研究中心,云南 昆明650500)
海上舰船目标检测是数字图像处理在遥感领域的一个重要应用,其研究成果在民用和军事方面都有广泛的用途,比如在对特定海域进行水运交通监视、船只救援、非法倾倒油污检测、战时战况监视、海盗行为监控等.随着当前传感器技术的发展,使得多源、多时相影像的获取更为容易,舰船目标检测的方法朝着多源信息融合检测的方向发展.法国的研究认为一个完整的舰船监测系统,应将光学与微波遥感数据结合,其中全天时、全天候的微波遥感数据用于检测目标,分辨率高、解译容易的光学遥感数据用于目标识别,从而综合提高舰船目标的检测和识别能力,并据此为欧盟第五框架DCLIMS开发了舰船目标识别系统[1-3].
无论是光学遥感图像,还是SAR图像,从中检测舰船目标的关键在于能否准确地从含有目标的区域中将背景和目标分割开来.常用的图像分割方法包括区域生长法[4]、聚类法[5-6]、边缘与区域结合法[7]以及阈值法[8-10]等.区域生长法需要给定种子点,依据种子点进行区域生长,自动性差;聚类法适用于多区域分割,用于单目标分割时其性质和效果与单阈值法类似;基于边缘的方法从物体轮廓来考虑分割,但分割效果受边缘检测效果的直接影响,多数情况下,边缘检测的抗噪性和精度难以同时保证.基于阈值的分割方法由于其原理简单、计算量小而在实时和近实时性系统中广为应用[8,11-12].
许多应用场合都对目标检测的漏警率有严格的要求,因为少量的漏警将会造成致命的后果,漏警的代价远高于虚警.文献[13]针对光学遥感图像采用多阶阈值进行分割,对于复杂海域背景情况下的舰船目标识别取得一定效果,但该方法存在两点不足:一是仅针对光学遥感图像进行建模,二是需要进行多次分割,较为耗时.鉴于此,本文从构造分割阈值集合出发,通过特征约束条件,寻找最佳分割阈值,从而达到对舰船目标的最佳分割效果.
1 阈值分割
常见的阈值分割方法有最小误差阈值法(Minimum Error Threshold,MinErT)[8,12,14]、最大类间方差法(OTSU)[15]和最大熵法(Maximum Entropy Threshold,MaxEnT)[16].无论是哪一种阈值分割算法,要进行成功分割,至少需要满足如下条件:
(1)图像存在可分割阈值T*;
这样,对图像的分割可以描述为:

其中,RF为前景(目标)像素集合,RB为背景像素集合.
对于条件(1),针对海洋区域的舰船目标是合理的;至于条件(2),对于简单背景的图像,当前分割算法能够满足,但遥感图像成像情况复杂,多数情况下数据的统计特性并不满足算法的假设条件(比如像素统计直方图不具有双峰特性),使得计算出来的阈值偏离T*太多(即Δ过大),导致分割失败,无法检测出目标.如图1(a)为一幅Quickbird成像的背景复杂且含有舰船目标的光学遥感图像,图1(b)为其无双峰特性的统计直方图,图1(c)是初步分割结果(理想阈值),图1(d)为图1(c)经过形态学后处理的结果.图1(e)-(g)是用三种常见阈值分割法对原图进行分割的结果.可见,由于背景的复杂性,常用分割算法都难以找到准确的分割阈值,导致分割失败,无法从分割结果中提取出感兴趣目标.

图1 复杂海面背景图像的阈值分割Fig.1 Segmentation results of different thresholds for ship target detection with complex sea background
相对于单阈值分割的局限性,多阶阈值分割方法用于分割多个、不同灰度级的目标或区域,王保云等对光学遥感图像中复杂海面背景提出了多阶阈值分割[13],取得了一定的效果(其分割流程如图2所示).但多阶阈值分割算法只针对光学图像进行分析,同时需要对多个分割结果进行判断,这增加了计算量.如何针对复杂背景情况,在多阶阈值的基础上寻找到最佳阈值进行一次最优分割,成为亟待解决的问题.

图2 基于多阶阈值分割的目标区域分割Fig.2 Flowchart of the multi-level threshold segmentation method
2 最佳阈值分割算法
2.1 算法流程
无论是在民用的船只监测,还是军事上的战时战况监视等应用环境,都需要舰船目标检测系统具有很高的检测率(即漏警率接近于0),而对虚警率的要求则可以适当放松.这使得我们可以首先关注如何最大可能的检测到目标,然后再进行虚警去除.
从前面的分析可知,单阈值分割失败是由于获得的t相对于T*发生了偏离.如果能够对不同图像获得的t进行修正以逼近T*,这样就能达到期望的分割效果,基于最佳阈值分割算法正是基于这一思路来建立的,即通过t构建阈值集合,然后在分割约束条件下寻找最佳分割阈值T*,从而进行最优分割.
两组均予常规治疗,包括避免可能加重肾损害的药物应用、降压、纠正肾性贫血等,并予解毒泄浊颗粒保留灌肠。治疗组在对照组治疗基础上,加用蓉黄颗粒(含肉苁蓉、生大黄、牛膝、蒲公英、六月雪、姜竹茹、茯苓、桃仁、甘草,由安徽省中医院药剂科制成颗粒剂,每包10 g,产品批号:20161211)冲服,3次/d,每次1袋。疗程均12周。
基于分割阈值集合的分割算法流程如图3所示,算法流程为:
(1)计算近似分割阈值t;
(2)计算分割阈值集合中各元素;
(3)选择最佳分割阈值;
(4)分割并进行后处理.
近似分割阈值t可选定 MinErT、OTSU、MaxEnT中任一算法的计算结果.
分割之后的后处理是为了去除噪声,方便特征提取,对光学图像可以采取一次开运算;对于SAR图像,由于其边缘闭合性差,进行一次3×3模板下的膨胀运算.

图3 目标区域的最佳阈值分割流程Fig.3 Flowchart of the optimal threshold segmentation method
分割后的二值图像认为是目标与背景完全分离的图像,目标为白而背景为黑,或相反.
2.2 阈值集合构建
设T为根据t校正后的分割阈值,首先可得到分割阈值集合ΩT为:

式中λ=0,±1,±2,...为控制调整系数,δ(I)为与图像I有关的调整项单元,最小值为1.这里定义与文献[13]相同

因为δ(I)较小,所以可认为ΩT中元素总有T的一个或者多个近似等于T*,从而认为ΩT中存在着理想分割阈值,即认为T*∈ΩT.
2.3 最佳阈值搜索
从ΩT快速搜索到T*是算法的关键步骤.在多阶阈值分割算法中,集合ΩT中所有元素均被用于分割操作,但最终分割成功的阈值只有T*.为了最大限度发现目标,所以总是假设区域中含有目标,从而可以利用首次分割结果引导下一次的阈值选择(如果首次分割不成功的话).

式中g(fk)为分割后特征向量fk的约束函数,即λk的取值受当前分割后特征向量约束.为简单起见,本文算法中只取目标的面积因素(详见下文)作为约束函数的自变量,即fk=sk.若前分割结果所得目标区域像素值较小,则降低分割阈值,即λk为负;当所得目标区域像素值过大,则增高分割阈值.g(sk)的定义为:

s0为当前分辨率下同类型舰船目标的面积像素均值,ck为经验常数,本文算法中取c1=5,c2=3,ck=1,k≥3.ck取值不同是为了更快的搜索到最佳分割阈值.以图1(a)为例,σ=16,MinErT算法得到的近似阈值为t=66,应用本文算法得到T1=t=66,T2=72,T3=70,搜索三次达到最佳阈值.
3 舰船目标检测流程
检测流程:

图4 遥感图像舰船目标检测流程Fig.4 Flowchart of ship targets detection of remote sensing image
舰船目标检测首先进行全图的粗分割,提取感兴趣区域,然后对感兴趣区域进行目标分割,最后对分割结果提取特征并进行判决.
有的算法[17]把感兴趣区域提取和目标分割合二为一,但由于感兴趣区域的全局性,难以兼顾到区域内分割的准确性,直接判决影响了检测效果.更多算法将粗细两级分割分别进行.为了使在提取感兴趣区域时不发生舰船目标遗漏的情况,一般都把粗分割的门限控制得较为宽松,这样会引入较多的非目标子块.下一步的自适应目标分割就需要对所有感兴趣区域进行精细分割,从而能够保证提取的特征能够准确刻画区域特性,并作出正确的判决.
本文的感兴趣区域提取使用文献[17]中contrast box滤波,将提取出来的区域作为粗分割结果,以待进行精细分割.
特征提取和判决:
根据舰船目标的几何特性和分割后的特点,采用下列六个量描述目标[13,17]:区域长度l—最小外接矩形长度;长宽比r—最小外接矩形的长宽比,描述目标区域的矩形;面积a—区域的像素面积,描述目标区域的大小;紧致度c—区域边界像素数目的平方与面积a的比值,描述目标区域的边界复杂性;矩形度f—区域面积与区域的最小外接矩形面积的比值,描述目标区域与最小外接矩形的接近程度;对称性s—二值图中目标区域关于最小外接矩形中心线两边的像素数的差异,描述目标区域的对称性.
上述六个量组合成一个6维目标特征矢量V(l,r,a,c,f,s),对舰船目标进行表达,兼顾了舰船的外形特征和多边形特性.
根据先验知识或训练数据,给出每个特征的置信区间,根据每个置信区间对提取的特征进行匹配,最后综合特征矢量判别得到目标判断结果.
4 实验及结果
4.1 试验数据
为了试验算法对不同数据源、不同分辨率、不同场景的目标检测效果,我们选取了多颗卫星的光学遥感数据和雷达遥感数据作为测试.
光学遥感数据:
测试来自 Quickbird、Spot、Ikonos、Landsat卫星遥感图像中随机筛选的24 523个样本,分辨率从10m到0.6m,图像大小从30pixels×32 pixels到500pixels×500pixels.其中含有舰船目标的样本共1 133个,船体大小从15pixels×4 pixels到316pixels×80pixels,而不含舰船目标的样本数为23 390个.图5为实验的部分样本,其中右边两幅含有舰船目标.

图5 部分光学遥感图像实验样本Fig.5 Some optical samples of remote sensing image
SAR数据:
从Radarsat 1数据中随机挑选516个样本,其中含有舰船目标的为22个,不含舰船目标的为494个.图6为部分样本,其中右边两幅含有舰船目标.

图6 部分SAR图像实验样本Fig.6 Some SAR samples of remote sensing image
4.2 试验结果
试验中,针对含有舰船目标的光学遥感数据进行了粗略归类.将海面较为简单、统计直方图具有明显双峰特性的归为第一类,海面背景较为复杂的归为第二类.这样共有三组舰船样本:光学一类453个,光学二类680个,SAR图22个.不含舰船的样本共23 884个.总测试样本共25 039个.
分别使用MinErT、OTSU、MaxEnT三种常用阈值分割方法对实验样本进行目标检测,结果如表1.表中同时给出了以上述三种方法获得阈值为基础的多阶阈值分割法检测效果,如表中的“多阶阈值法”所示,同时给出对应的最佳阈值法检测结果,分别对应表1中的“本文方法(t1)”“本文方法(t2)”“本文方法(t3)”项,实验中多阶阈值法和本文算法的参数M取值均为8.
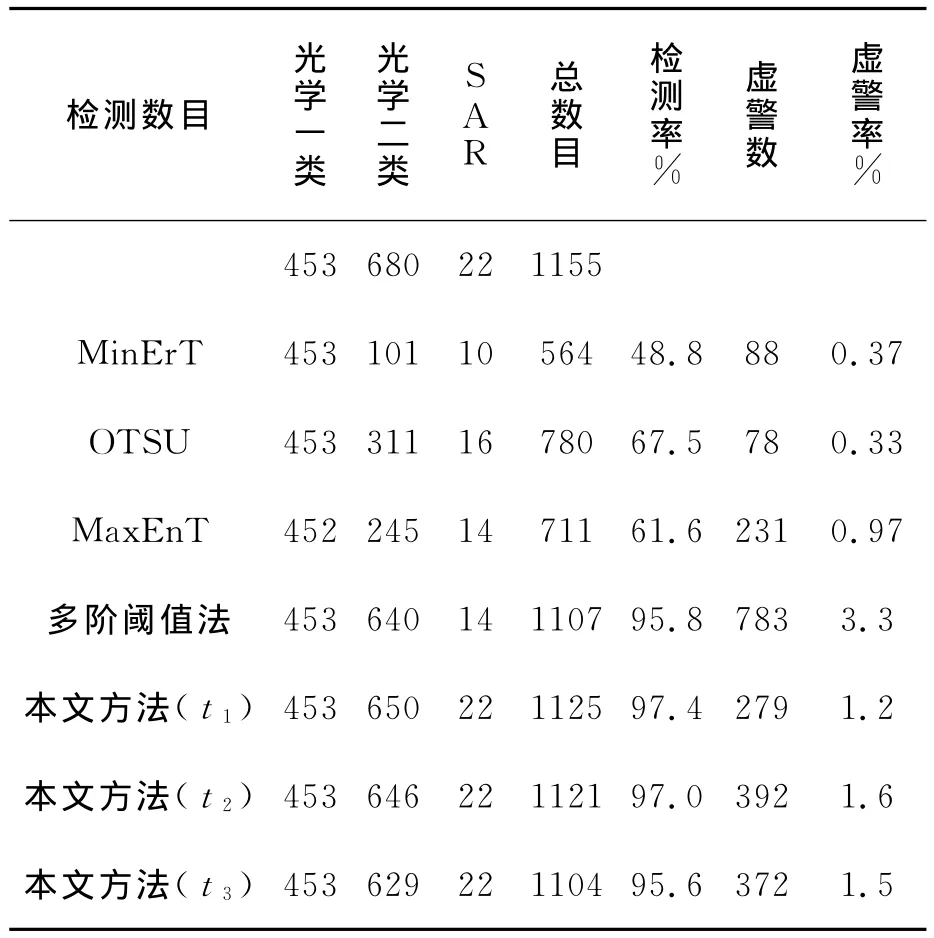
表1 检测结果统计Table 1 Statistics of detection results
表1中也同样可以看出,初始阈值对于本文算结果为初始阈值的“本文方法(t2)”和“本文方法(t3)”同样表现出良好的检测效果,检测率分别为 97.0%、95.6%,虚警数分别为 392 和372个.

表2 分割次数与适用场景Table 2 Statistics of times of segmentation and application cases
表2为各算法的阈值计算次数与分割次数比较.MinErT、OTSU和MaxEnT是直接进行阈值计算,计算较为简单,但只适用于简单背景的情形,对于复杂背景的情况,大多分割失败;多阶阈值法对复杂背景有了一定的适应性,但分割次数较多,平均需要进行6次计算才能找到最佳阈值,因为多阶阈值法是用所有阈值进行分割,所以同样需要进行6次分割和特征判断;本文算法由于以特征约束为导向,能够大大降低阈值计算次数和分割次数,平均只需分割2.3次就能达到最佳效果.
图7(a)、(b)分别为一幅光学遥感图像和一幅SAR图像的检测效果图.从图中可以看到本文算法能够对舰船进行很好的检测,不受海浪背景和近岸物体的影响.


图7 舰船目标检测结果Fig.7 Results of ship targets detection
5 总 结
本文提出了基于最佳阈值分割的舰船目标检测方法.该方法以初始阈值出发,通过特征约束,自适应地寻找最佳分割阈值,能够适应各种前/背景特征变化的情况,将目标成功分割出来,特别是海面背景复杂的图像效果尤佳.根据不同卫星的大量数据试验证明,在针对特定目标类型的分割识别中,本文方法在保持虚警率不变或者略有升高的条件下,可使检测率得到大幅提升,具有广阔的应用前景.
[1]HEYNEN M.Coastal mapping&ship detection from vhr satellite imagery[C].The Fifth Meeting of the DECLIMS Project,Famborough,UK,2005.
[2]MARRE F.Automatic vessel detection system on spot-5optical imagery:a neuro2genetic approach[C].The Fourth Meeting of the DECLIMS Project,Toulouse,France,2004.
[3]OLIVIER PRONIER.Optical data for ship detection[C].The Sixth Meeting of the DECLIMS Project,Ispra,Italy,2006.
[4]范伟.基于区域生长的彩色图像分割算法[J].计算机工程,2010,36(13):192-196.
[5]LI HAIYAN,HE YIJUN,SHEN HUI.Ship detection with the fuzzy c-mean clustering algorithm using fully polarimetric[C].Geoscience and Re-mote Sensing Symposium,IEEE International(IGARSS2007),Barcelona,Spain,2007.
[6]吴锐,尹芳,唐降龙,等.模糊逻辑和谱聚类的字符图像分割[J].哈尔滨工业大学学报,2010,42(2):268-271.
[7]何宁,张朋.基于边缘和区域信息相结合的变分水平集图像分割方法[J].电子学报,2009,37(10):2215-2219.
[8]储昭亮,王庆华,陈海林,等.基于极小误差阈值分割的舰船自动检测方法[J].计算机工程,2007,33(11):239-241.
[9]KITTLER J,ILLINGWORTH J.Minimum error thresholding[J].Pattern Recognition,1986,19(1):41-47.
[10]Zasada D M,Sanyal P K,Perry R P.Detecting moving targets in multiple-channel SAR via double thresholding[C].Proceedings of the IET International Conference on Radar Systems,Edinburgh,UK,2007.
[11]胡俊华,徐守时,陈海林,等.基于局部自相似性的遥感图像港口舰船检测[J].中国图象图形学报,2009,14(4):591-597.
[12]朱齐丹,荆丽秋,毕荣生,等.最小误差阈值分割法的改进算法[J].光电工程,2010,37(7):107-113.
[13]王保云,张荣,袁圆,等.可见光遥感图像中舰船目标检测的多阶阈值分割方法[J],中国科学技术大学学报,2011,41(4):293-298.
[14]范九伦,雷博.灰度图像最小误差阈值分割法的二维推广[J].自动化学报,2009,35(4):386-393.
[15]石爽,曲仕茹,张大奇.基于改进型类间方差分割的红外目标提取算法[J].西北工业大学学报,2010,28(2):259-263.
[16]吴一全,潘喆,吴文怡.二维直方图区域斜分的最大熵阈值分割算法[J].模式识别与人工智能,22(1):162-168,2009.
[17]赵英海,吴秀清,闻凌云,等.可见光遥感图像中舰船目 标 检 测 方 法 [J].光 电 工 程,2008,35(8):102-106.
