APSO算法在光伏阵列MPPT追踪器中的应用
2014-07-25廉小亲赵瑾张晓力吴叶兰段振刚
廉小亲,赵瑾,张晓力,吴叶兰,段振刚
(北京工商大学计算机与信息工程学院,北京100048)
APSO算法在光伏阵列MPPT追踪器中的应用
廉小亲,赵瑾,张晓力,吴叶兰,段振刚
(北京工商大学计算机与信息工程学院,北京100048)
针对传统的MPPT算法无法在光伏阵列局部遮阴或光照不均等情况下对最大功率点进行有效追踪的问题,提出了一种自适应粒子群优化(APSO)算法。阐述了APSO算法的基本思想以及将该算法实际应用到光伏阵列最大功率点追踪(MPPT)追踪器中的设计思路,并给出了带APSO算法的追踪器硬件实现原理框图。测试结果表明,基于该算法的追踪器能够快速、准确地实现光伏阵列在部分遮挡条件下全局最大功率点的追踪,具有一定的工程应用价值。
光伏发电系统;局部遮阴;最大功率点追踪;APSO算法
通过控制系统对光伏阵列实施最大功率点追踪(maximum power point tracking,MPPT)是提高光伏电池转换效率的有效方法之一。国内外的专家学者提出了很多相应的MPPT控制算法,主要包括:扰动观察算法(P&O)、增量导纳算法(ICA)以及基于扰动观察法的改进算法等。然而这些传统的MPPT算法主要是基于光伏阵列在辐照和温度都一定的条件下,并且P-V输出特性曲线呈现单峰状态下进行研究的。在实际应用中,部分遮挡或光照不均等现象是普遍存在的,此时光伏阵列的P-V输出特性曲线呈多峰状[1-2],使得常规的MPPT算法在这种情况下失效。
自适应粒子群优化算法(adaptive particle swarm optimization,APSO)以其在多峰函数优化、全局寻优方面良好的优势,完全能够实现多峰情况下的最大功率点追踪,提高太阳能的利用率。本文重点阐述了APSO算法的基本思想以及将该算法实际应用到光伏阵列MPPT追踪器中的设计思路,并给出带APSO算法的光伏阵列追踪器的硬件电路,在此基础上进行了系统性能测试。
1 MPPT追踪器的工作原理
光伏发电系统结构图如图1所示。该系统主要由光伏阵列、追踪器、DC/DC转换器和负载组成。
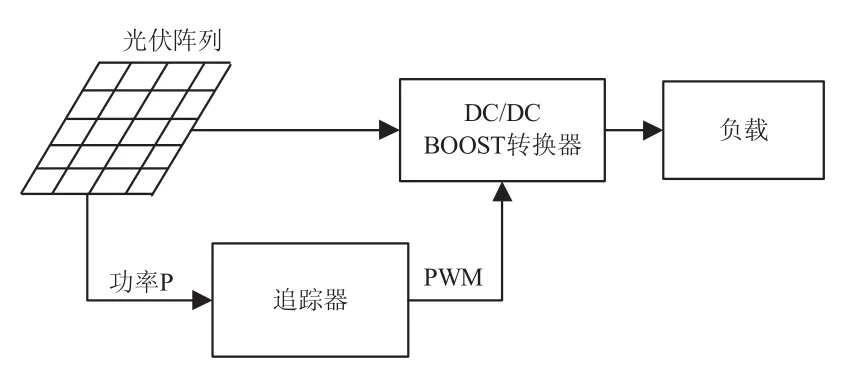
图1 光伏发电系统结构图
由最大功率传输原理可知:当负载阻抗与电源内阻相匹配时,负载获得的功率最大,所以光伏阵列最大功率追踪器实质上就是通过采集光伏阵列的输出电压和输出电流,计算得到光伏阵列的输出功率,再根据控制算法输出一定占空比的PWM波,继而调节DC/DC转换器中功率开关管的导通率,从而改变负载阻抗,使之与光伏阵列的内阻等值匹配,最终实现最大功率点的跟踪控制。
2APSO算法在光伏阵列MPPT追踪中的应用
2.1APSO算法的基本原理
APSO算法是在粒子群算法(particle swarm optimization,PSO)的基础上提出的。PSO算法的基本思想是基于粒子的群体迭代。算法开始时,粒子群会被随机初始化,之后不断进行迭代,直到粒子群追踪到合适的全局最优解。迭代时,粒子会通过追踪到的粒子个体最优解和群体最优解来更新自己。当所有粒子全部收敛到群体最优解上时迭代结束。但是PSO算法收敛速度较慢,并且易陷入局部最优。
为了增强PSO算法的全局搜索能力,使其在陷入局部最优时,能够以更大概率跳出局部最优位置,一些专家学者提出了APSO算法[3]。该算法能够克服PSO算法固定参数的不足,根据群体自适应地调整惯性因子。其数学表示如下:



粒子群初始位置和速度随机产生,然后按式(1)~(5)进行迭代,直至找到最优解为止。APSO算法流程见图2。
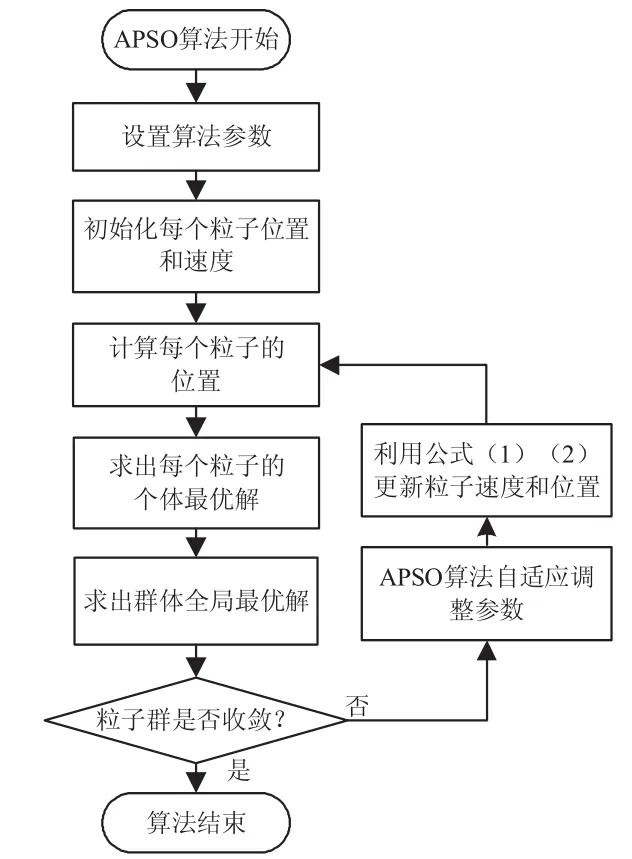
图2APSO算法流程图
2.2APSO算法在光伏MPPT追踪器上的实现
2.2.1APSO算法在光伏MPPT追踪器上的设计思路
在光伏最大功率点追踪的应用中,定义光伏阵列的功率函数作为APSO算法的目标函数。由于每次改变控制脉冲波(PWM)的占空比之后,负载发生变化,光伏阵列输出的电压和电流都会随之改变,所以在设计追踪器上实际应用的APSO算法时,粒子的位置对应于追踪器输出(PWM)的占空比;粒子的速度对应于每次迭代之后占空比的变化量。这样在应用到追踪器上时,APSO算法的式(1)、式(2)就可以作如下修改:
粒子的速度和位置:

每个粒子的位置极值点:

全局最优功率点:

当APSO算法在追踪器上应用时,会先对粒子所包含的数据赋初值。粒子初始化结束以后,粒子群将根据式(6)~(9)进行第一次迭代,寻找粒子的极值和全局最大值。迭代完成之后,判断所有粒子是否已经收敛。倘若尚未收敛,追踪器将对粒子参数进行调整,并更新粒子位置,为下一次迭代做准备。上述过程会一直循环,直到所有粒子收敛到最优位置,算法才停止,此后,追踪器会定时检测光伏输出特性是否改变。若改变,就再次启动算法重新搜索最大功率点;若未变,则追踪器将维持在最优占空比位置,这样整个系统就会工作在全局最优点的位置。
为加快APSO算法的收敛速度,避免陷入局部最优,在设计APSO算法时,需要注意以下两点:
(1)如何有效地对粒子群进行初始化,加强初始解的多样性
初始化时,将粒子位置均匀分布在整个光伏阵列P-V曲线的横轴上,这样粒子群的搜索空间中就会包括光伏阵列输出的全局最大功率点。同时,由于占空比变化范围是0~100%,则对应的粒子位置也在这个范围内变化。如果系统选取的粒子个数为10个,将其粒子的位置均匀分成10份,也就是将PWM的占空比分成10份。第一个粒子在0~10%之间的位置中随机选取一点作为自己的初始位置,第二个粒子在10%~20%之间的位置随机选取一点作为自己的初始位置,其余的8个粒子采用同样的方式进行初始化。这样就可以保证粒子的初始化位置能够均匀分布在整个光伏阵列P-V曲线的横轴上。
这种初始化方式与粒子初始化时簇拥在一个小范围内的方式相比,寻找全局最优的速度更快,还可以避免粒子过早收敛在局部最优点上。
(2)如何检测光伏输出特性是否改变
光伏系统在追踪到最大功率点后,若光伏系统光照发生变化,光伏阵列的P-V输出特性曲线将发生变化,最大功率点的位置将会发生改变。为了准确地对最大功率点进行追踪,需要及时检测光伏系统的输出特性是否改变。假设系统在占空比为δ时有最大功率输出,需在其两侧以φ作为步长来调整占空比,具体检测方法如图3所示。这样,就可以及时有效地对最大功率点进行追踪,保证系统的输出功率一直处于最大。
2.2.2APSO算法应用于追踪器时参数调整思路
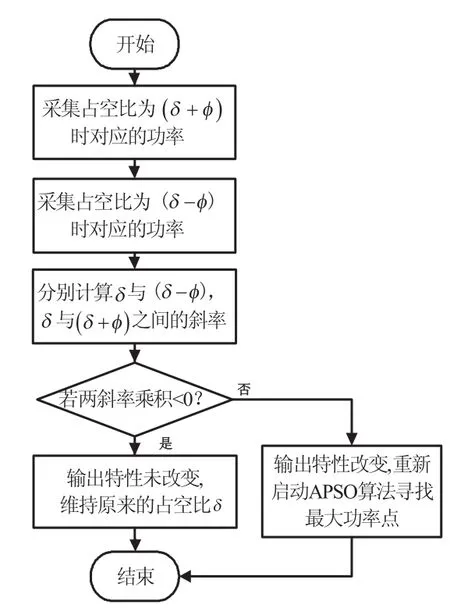
图3 检测光伏输出特性是否改变的流程图

此外,由于占空比最大精度为0.1%,所以还应保证粒子的变化速度即占空比的变化不小于0.1%,如果调整后的速度小于最小细分值0.1%,需将速度调整为0.1%。
这样,通过APSO算法在MPPT追踪器上的应用,就可以实现光伏阵列在有遮挡情况下多峰值的最大功率点追踪。
3 带APSO算法的追踪器硬件设计
在设计追踪器的硬件电路时,采用了模块化的设计方式。追踪器控制电路的核心芯片采用TI公司的DSP芯片TMS320F28027,追踪器硬件原理框图如图4所示,主要由DSP控制模块、采集模块和MPPT控制模块三部分组成。
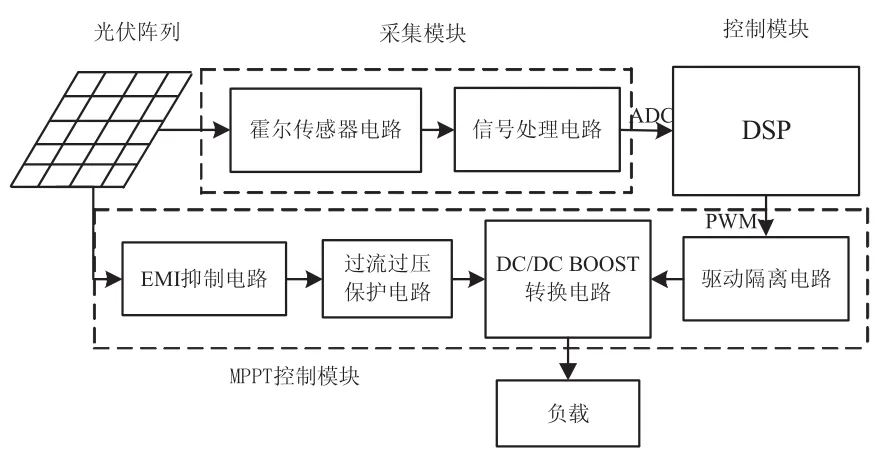
图4 追踪器硬件原理框图
系统工作时,首先通过采集模块实时采集光伏阵列的输出电流和电压,输入至DSP上,由控制模块计算出相应的输出功率,并利用APSO算法产生PWM控制信号,调节DC/DC转换电路中功率开关管的导通率,控制负载阻抗值。系统按照这种模式持续工作下去,直到负载阻抗和光伏电池内阻等值匹配,即当前光伏阵列输出的功率是全局最大功率为止。
4 测试结果
算法响应时间是衡量算法性能的重要指标。为检测所设计的追踪器性能,对算法响应时间进行了测试。算法的响应时间以初始化粒子为起点,以寻找到全局最优点粒子群收敛为终点。通过安捷伦E4360仿真电源软件读取AD采集卡的采集数据并绘制出功率-时间(P-t)图和电压-时间(V-t)图,如图5所示。
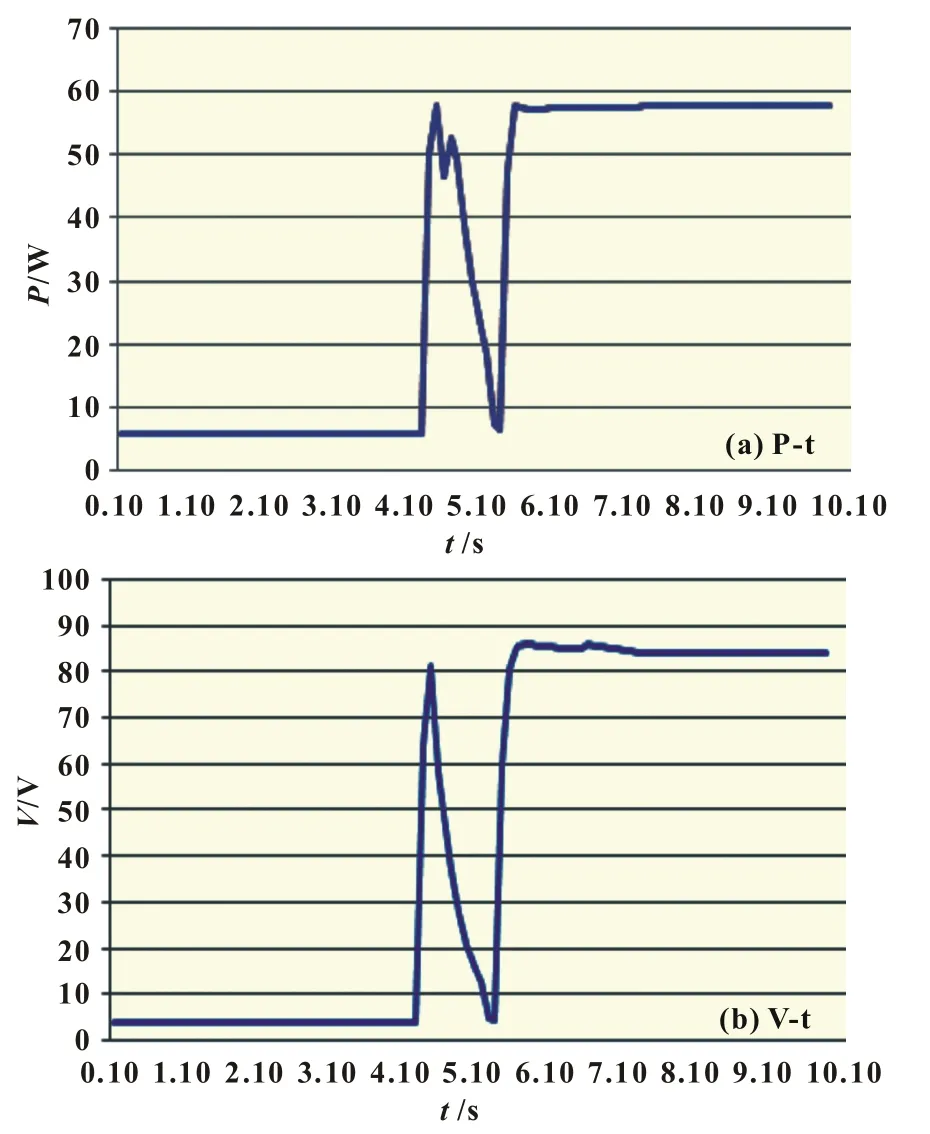
图5APSO算法追踪最大功率点时P-t响应和V-t响应图
从图5中的P-t曲线可以看出,粒子群在4.3 s位置开始初始化,此时随着粒子位置的不断调整,仿真电源的输出功率呈现很大的波动,直到5.6 s时粒子群初始化结束;在5.7 s时算法进行第一次迭代,此次迭代结束后粒子群没有收敛;在5.8 s时粒子群进行第二次位置调整,直到6.9 s时第二次调整结束,并进行第二次迭代,此次迭代后粒子群仍没有收敛;在7.0 s位置处,粒子群进行第三次调整,直到8.0 s时第三次调整结束,并进行第三次迭代,此次迭代结束后粒子群收敛,输出占空比稳定在11%位置,整个APSO算法从启动到收敛仅耗时3.7 s系统利用该算法进行追踪后,追踪到的最大功率点功率为57.174 W,而安捷伦E4360仿真电源所给出的实际最大功率点功率为58.183 W,因此精度达98.3%。
由测试结果可以看出APSO算法能够在多峰情况下快速、精确地追踪到最大功率点,使系统稳定工作在输出功率最大点处,满足算法的设计要求。
5 结束语
该系统的设计通过将搜索速度快、稳态性能好的APSO算法应用到MPPT追踪器上,成功地解决了部分遮挡或光照不均等情况下,光伏阵列P-V输出特性呈现多极值点,传统MPPT算法无法准确跟踪最大功率的问题,为光伏系统最大功率点追踪提供了一个新的思路和解决办法,具有一定的工程价值和良好的应用前景。但由于实验室条件有限,一些强电的测试实验没有完成,如何在大功率条件下实现光伏控制系统的优化控制,今后还将进一步研究。此外如何进一步提高APSO算法的快速性也将是下一步研究工作的重点。
[1]廉小亲,张晓力,王嵩,等.光伏系统在部分遮挡条件下的GMPPT算法研究[J].电源技术,2012,36(10):1470-1473.
[2]冯宝成,苏建徽.部分遮挡条件下光伏组件的建模与仿真研究[J].电气传动,2011,41(7):61-64.
[3]朱艳伟,石新春,但扬清,等.粒子群优化算法在光伏阵列多峰最大功率点跟踪中的应用[J].中国电机工程学报,2012,32(4): 42-48.
[4]韩江洪,李正荣,魏振春.一种自适应粒子群优化算法及其仿真研究[J].系统仿真学报,2006,18(10):2969-2971.
[5]林川,冯全源.一种新的自适应粒子群优化算法[J].计算机工程,2008,34(7):181-183.
Application ofAPSO algorithm in MPPT tracker of PV system
LIAN Xiao-qin,ZHAO Jin,ZHANG Xiao-li,WU Ye-lan,DUAN Zhen-gang
The traditional MPPT algorithm couldn't solve the problem of trackingmaximum power point effectively in the situation of PV array partially shaded or uneven illumination,an adaptive particle swarm optimization(APSO) algorithm was proposed.The basic idea of the algorithm and the design idea when the algorithm applied in the PV array MPPT tracker were elaborated,and thehardware block diagram of theAPSO algorithm-based tracker was put forward.Test results show that the tracker can work quickly and accurately to achieve globalmaximum power point tracking under partially shaded conditions,andhas a certain value in engineering applications.
photovoltaic power generation system;partially shaded;MPPT;APSO algorithm
TM 914
A
1002-087 X(2014)10-1836-03

2014-03-15
北京市教委科技创新平台(PXM2011-014213-113551);北京市教委科技发展计划面上项目(KM201110011005)
廉小亲(1967—),女,河南省人,博士,教授,主要研究方向为计算机测控技术、可再生能源利用。
