通用GPS网平差数据预处理方法研究
2014-07-25许双安
许双安
(中铁第一勘察设计院集团有限公司,陕西西安 710043)
通用GPS网平差数据预处理方法研究
许双安
(中铁第一勘察设计院集团有限公司,陕西西安 710043)
首先从基线计算文件中提取基线观测值及其方差-协方差阵,多基线解模式数据须考虑同步基线间的随机相关性,重新构造基线向量及其全方差协方差矩阵;再进行同步环闭合差、异步环闭合及基线重复性检核,剔除含有明显粗差的基线;采用最优模型从上述步骤中保留下的基线数据中提取独立基线,得到较“干净”的观测值;最后进一步处理残留粗差,采取三维无约束平差结合基于相关分析的粗差探测方法进行粗差探测,为后续平差数据处理做好准备工作。
数据预处理 三维无约束平差 粗差探测
GPS基线网平差数据处理是对GPS静态相对定位技术获取的三维基线向量成果进行质量检核、平差计算及坐标转换等各项处理,最终获得测站点的WGS84坐标系下的三维坐标及特定坐标系下的空间三维或平面二维坐标成果及转换参数。GPS观测数据质量受到卫星系统、空间传播路径及接收机系统带来多种误差影响[1],野外检核条件也较少,观测量中经常含有粗差。采取精密模型解算基线,得到的基线向量中已经剔除了大部分的粗差,但仍会残留一小部分粗差,将严重损害GPS定位的精度。在通用高精度GPS网平差软件研制的实践中,必须对基线向量中的粗差进行分析和处理,数据预处理质量将直接影响定位结果的可靠性和精度,是软件研发的重点和难点之一。主要探讨通用GPS控制网平差数据处理系统(GPSNetworkAdjust)研发过程中的数据预处理问题,分析总结了多种粗差分析策略,设计了通用GPS控制网平差数据预处理方法,并在通用GPS控制网平差数据处理系统中进行算法实现和验证,提高GPS网平差处理的可靠性。
1 平差观测值提取
同步基线数据是以观测时段为基本单元的基线向量文件,由基线处理软件输出,其格式各不相同,平差时提取每条基线的三维基线分量作为平差的观测值,基线的方差协方差阵作为随机模型进行定权。
基线解模式考虑了同步观测基线间随机相关,给出解算所得测站坐标分量(地心纬度N,地心经度E,地心向径U)的方差及其全相关系数阵(3×n维方阵),同时也给出了每条基线三维分量及单条基线分量间相关系数矩阵。平差时若忽略基线之间的相关性, 方差-协方差阵为对角阵,差后点位坐标偏差可达到毫米级,特殊情况达到数个毫米,同时对转换参数和单位权方差也有一定的影响[2],高精度GPS 网平差中不容忽视。应考虑基线间的随机相关性,以保证模型的严密性,多基线解数据应重新构造基线观测值及方差协方差阵,转换过程如下:
(1)依次将每点(第i点)由地心纬度坐标系转换成地心空间直角坐标,公式为
(1)
(2)求微分关系式
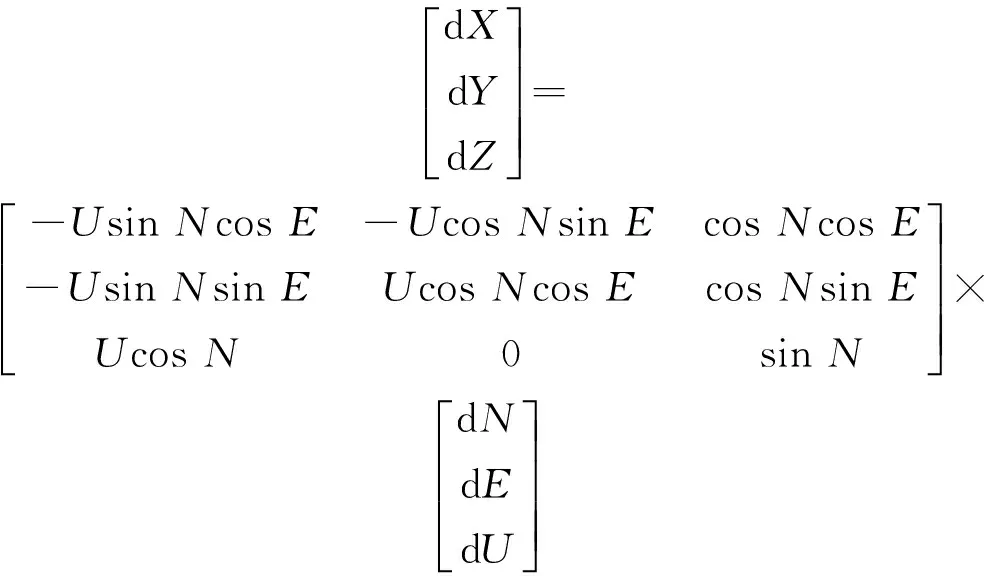
(2)
根据协方差传播定律,利用微分关系将同步网在地心纬度坐标系下的方差-协方差阵转换到空间直角坐标系下的方差-协方差阵,公式为
(3)

GPSNetworkAdjust在对多基线解模式解算出的基线进行平差时,内置了两种模式。第一种模式是考虑同步观测基线问的误差相关性,利用平差测站坐标及坐标全相关系数阵构造基线及其方差-协方差阵,第二种模式是不考虑同步基线之间的相关性,直接读取基线解文件中每条基线向量及基线向量间的相关系数阵构造方差-协方差阵。以某客运专线CP0控制网基线数据为例,采用两种模式对基线数据进行三维无约束平差,随机模型相关和随机模型独立平差坐标较差结果见表1。
从表1两种模式较差可以看出,对于多基线解数据,考虑基线间随机模型相关和随机模型,独立平差后坐标值略有差异,在本算例中坐标分量最大到0.8 mm。由此可见,忽略基线间随机相关性,点位坐标会产生偏差,这在高精度GPS 网平差中不容忽视。所以,在高精度GPS网平差过程中,应考虑基线间的随机相关性,以保证模型的严密性。
2 基线数据预处理
在平差前对导入的基线数据进行质量检核,剔除含有粗差的基线数据,选取一组满足平差要求的数据用于平差计算。数据预处理菜单包括同步环闭合差计算、异步环闭合差计算、重复基线较差计算及重复性拟合。
2.1 闭合差检核
同步观测环是三台或三台以上GPS接收机进行同步观测所获得基线向量构成的闭合环。同步环闭合差从理论上讲应等于零,若解算基线向量采用单基线解模式求解,由于计算环中各基线向量时所用的观测资料和处理方式实际并不严格相同,数据处理软件不够完善,以及计算过程中舍入误差等原因,同步环闭合差实际并不为零。同步环闭合差从某一侧面反应了GPS测的质量。
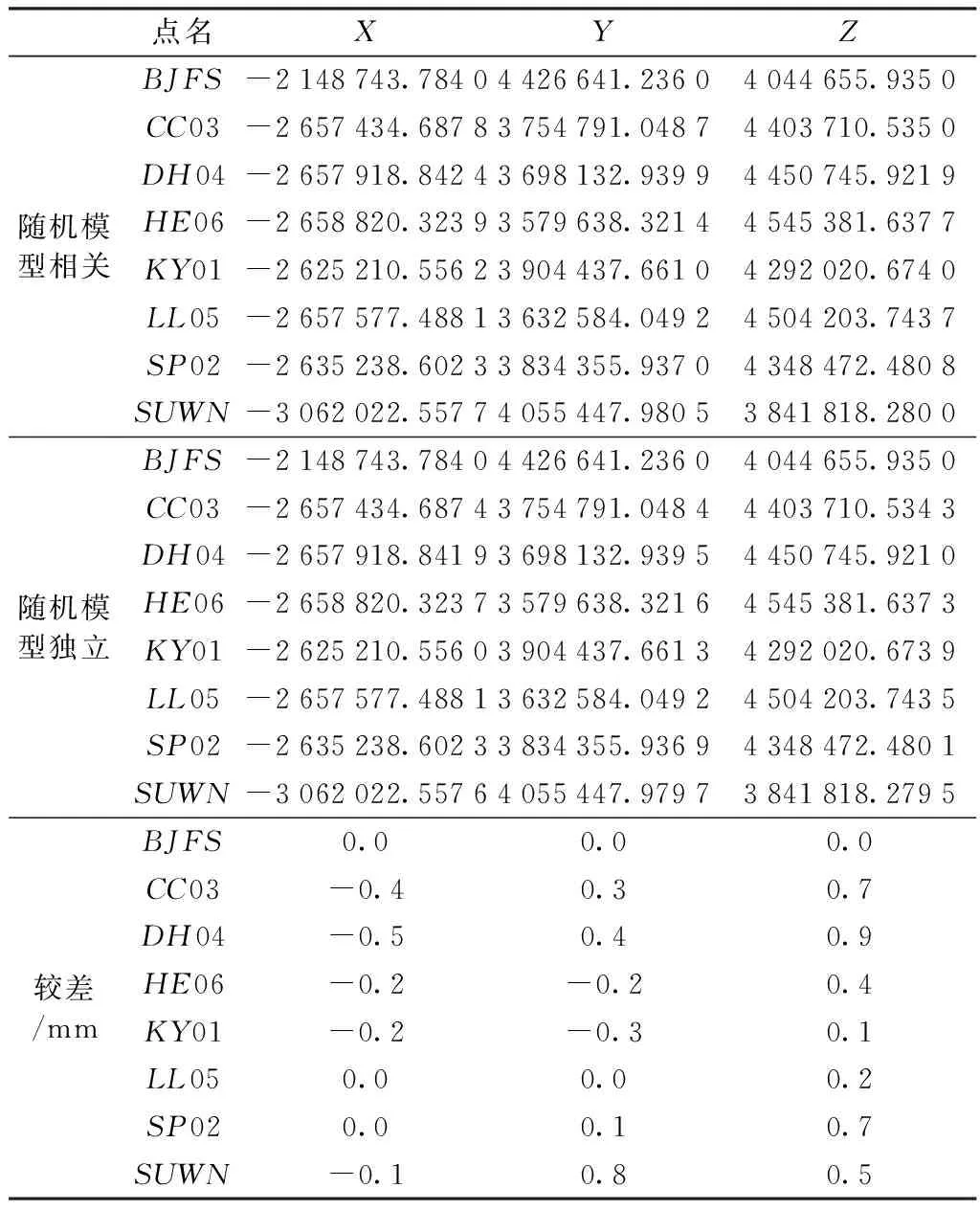
表1 两种模式平差后坐标较差 m
异步环也称非同步观测环,是由独立基线所构成的闭合环。异步环检验能更加充分地暴露出基线向量中存在的问题,更客观地反映GPS观测质量。
GPS基线分量闭合环(同步环和异步环)闭合差的大小,直接反映出基线观测量的实际精度,并由此可以发现GPS网中大的粗差观测值。基线分量的闭合差检验公式为
(4)
在同步环/异步环闭合差计算过程中,自动搜索闭合环是一个核心问题,一般只计算最小独立环。最小独立环应满足以下条件[3]:
(1)多边形还应该是相互独立(线性无关)的。独立闭合环个数为r=n-t+1;n为基线数,t为测站点个数。保证闭合环独立的方法是,每个新找到的闭合环都有前面找到的闭合环中不曾使用的基线观测值。
(2)在多边形环独立的情况下,闭合环的边长最短。
常用方法有:基于邻接矩阵的变换的搜索法;基于生成树和余树变换的闭合环搜索法;基于深度优先搜索的闭合环搜索法[4]。考虑到误差传播定律的性质,测站中误差与基线距离的平方根成正比。因此,最优的闭合环搜索法应是基于深度优先搜索的闭合环搜索法。
2.2 基线重复性检核
最小独立环闭合差结合基线重复性检核,可排查出含有粗差的基线。基线分量或边长Ci的重复性定义为[5]
(4)

每条基线的重复性计算后,就可以对各基线边长分量、北分量和东分量的重复性进行固定误差与比例误差的直线拟合,以作为衡量基线精度的参考指标,拟合方式如下
(6)
式中,Ls为基线长度,a为固定误差,b为比例误差。
基线重复性反映了定位的内部精度,通过重复性检验可以发现异常的测站和卫星,从而发现异常的观测时段,达到粗差定位的目的。同时重复基线分量或长度较差也具有发现异常基线的功能。
通过基线重复固定误差与比例误差拟合分析,一方面可以对基线观测精度是否符合规范要求进行检核,另一方面拟合出的固定误差和比例误差可以对基线向量随机模型进行校正。GPSNetworkAdjust在基线预处理时增加了基线重复性固定误差和比例误差的拟合模块,满足《全球定位系统(GPS)测量规范》(GB/T 18314—2009)对高等级GPS控制网质量检核的要求,弥补了常用商业软件的不足。
2.3 独立基线提取
当有N台GPS接收机进行了一个时段的同步观测后,每两台接收机之间就可以形成一条基线向量,共有N(N-1)/2条同步观测基线,可以选出相互独立的N-1条同步观测基线。凡是构成了闭合环的同步基线是几何相关的,独立基线可以消除同步环几何相关,减少计算量,精度评定更真实。GPSNetworkAdjust系统内置了多种独立基线提取方法,如图1。

图1 GPSNetworkAdjust提取独立基线方法对话框
传递式:即为顺序连线法,从每个时段基线数据中选择一条基线开始顺序向前递推连线,如图2。
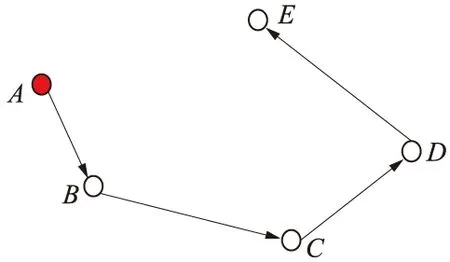
图2 传递式方案挑选的独立基线
散射式:对于射线法,分为从每个时段的第一条基线的起点找射线方法和随机在该同步时段的测站中选择一点找射线方法,如图3所示。
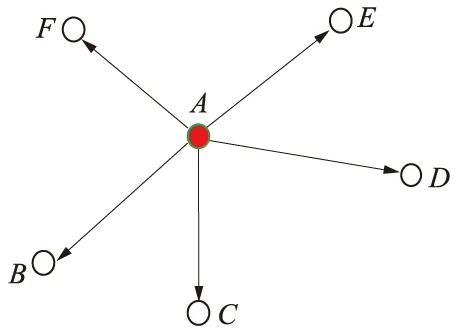
图3 散射式方案挑选的独立基线
全选式:将所有的基线向量都作为平差观测值,不区分同步基线和独立基线,全部基线参与平差计算。
相邻最短边式:采用顺序连线法,但是相邻点满足路径最短约束条件。同步环中,高精度的基线向量一般通过双差的平差方式获得,而双差的最大特点就是利用差分消除定位中的部分系统误差,差分效果的优劣直接取决为站间距离的长短,测站间距离越短,差分效果越好,基线精度越高[6]。另外,根据误差传播定律的性质,测站中误差与基线距离的平方根成正比[7]。因此,最优的独立基线网应是平均路径长度最短的基线网,即满足条件
(6)
式中n为测站点个数,li为选择的独立基线。
加权最短路径式:采用顺序连线法,考虑到不同基线的解算精度存在差异,引入基线长度的观测权,基线网加权平均路径最短。即满足条件
(7)
式中pi为代表基线li的权。
3 三维无约束平差及粗差探测
在WGS84坐标系下进行三维无约束平差,没有引入外部观测值及起算基准,避免了约束基准兼容性问题及外来粗差干扰,可充分利用观测值改正数进行粗差探测。采用基于相关分析粗差探测算法,验证发现基线向量中是否存在粗差,剔除含有粗差的观测值。经过三维无约束平差,GPS基线网质量内部符合性得到检核,为后续约束/联合平差提供了“干净”的观测值和合理的随机模型。
3.1 三维无约束平差
假设全网共有n个GPS点,记为Pi(i=1,2,3…n);通过观测共有m条独立基线向量。在WGS空间直角坐标系中,以测站空间三维直角坐标改正数为待求参数,全网的误差方程组为

(8)
为了使平差进行下去,还必须引入位置基准。第一种方法是以GPS网中一个点的地心坐标作为起算数据的位置基准;第二种采用秩亏自由网基准。GPSNetworkAdjust采用第一种引入方法,基准方程为
(9)

3.2 基于相关分析的粗差探测
在一个同步网内,不但一条基线的各分量之间存在相关性,而且基线与基线之间也存在这种相关性。在相关观测量的最小二乘平差中,一个观测量的误差,通过观测量之间误差的相关性和图形几何条件的关联性,反映于其他观测量的平差改正数之中。当一个观测量含有粗差时,必将或多或少地影响到其他观测量的改正数,可采用基于相关分析的粗差探测方法[8]。
可靠性矩阵R=QVVP的大小反映了观测值的误差作用于观测值改正数的程度
(10)
其中,A为误差方程组的系数矩阵,P是观测量的权阵,V为观测值改正数向量,QVV为观测值改正数的协因数阵。设ε为观测值误差,且有
(11)
将上式展开整理得
(12)
称Fi为观测值i的误差εi对改正数向量V的影响向量,Fi由误差方程组系数矩阵A和观测量权阵P决定。根据下面给出的假设检验方法进行粗差探测,若相关性显著,则观测值i就可能包含粗差。Fi对V的相关系数为
(13)

(14)

当存在多个含有粗差的观测量时,可能会使得某个非粗差的观测量与V显著相关,在程序编制中,为了避免这种“存伪”的情况,在粗差判别时加入vi>2δvi的附加条件,即当Fi对V的相关性显著,且有vi>2δvi时,判定该观测量为粗差。本文基线数据预处理及粗差探测算法流程图见图4。
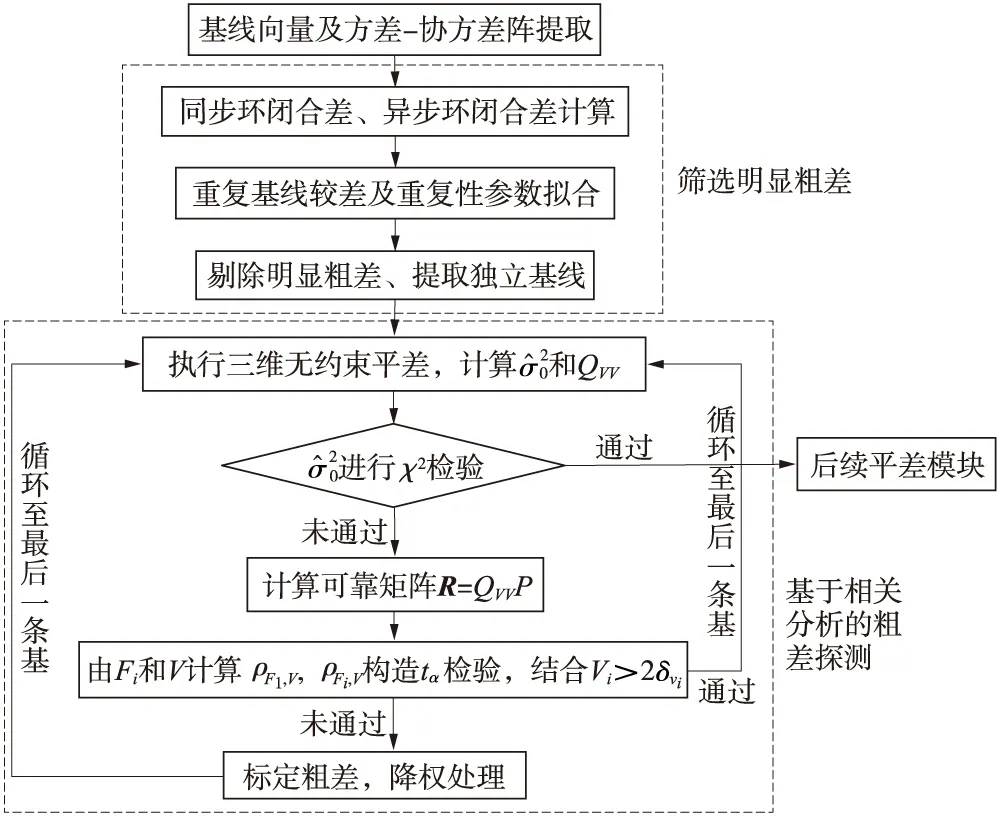
图4 基线数据预处理及粗差探测算法流程
4 结束语
首先从基线计算文件中提取基线观测值及其方差-协方差阵,多基线解模式数据须考虑同步基线间的随机相关性,重新构造基线向量及其全方差协方差矩阵;再进行同步环闭合差、异步环闭合差及基线重复性检核,剔除含有明显粗差的基线;采用最优模型从上述步骤中保留下的基线数据中提取独立基线,得到较“干净”的观测值;最后进一步处理残留粗差,采取三维无约束平差结合基于相关分析的粗差探测方法进行粗差探测,为后续平差数据处理做好准备工作。在自主研发的GPS数据处理软件GPSNetworkAdjust上进行平差,其结果与国际上常用的数据处理软件得到的结果相当,验证了数据预处理结果的可靠性。GPSNetworkAdjust在基线预处理时增加了基线重复性固定误差和比例误差的拟合模块,满足《全球定位系统(GPS)测量规范》(GB/T 18314—2009)对高等级GPS控制网质量检核的要求,利用基线计算获得测站坐标及坐标全相关系数阵构造基线及其方差-协方差阵,理论上更严密,适用于大范围高精度GPS控制网的数据平差,弥补了常用商业软件的不足之处。
[1] 李征航,黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社,2010:75
[2] 黄观文,张勤,丁晓光,等.一种高精度GPS基线网平差及软件实现[J].测绘科学,2009,34 (2):167-169
[3] 宋力杰.测量平差程序设计[M].北京:国防工业出版社,2012:200
[4] 赵一晗,伍吉仓.控制网闭合环搜索算法[J].铁道勘察,2006(3):12-14
[5] GB/T 18314—2009全球定位系统(GPS)测量规范[S]
[6] 黄观文.GPS精密单点定位和高精度GPS基线网平差研究及其软件实现[D].西安:长安大学,2009:70
[7] 王磊,李盼,吕翠仙.关联矩阵法在独立基线及独立双差模糊度选择中的应用[J].武汉大学学报:信息科学版,2010,35(6):715-718
[8] 陶本藻,姚宜斌,施闯.基于相关分析的粗差可区分性[J].武汉大学学报:信息科学版,2004,29(10):881-883
[9] 许双安.基于EGM2008模型的GPS高程转换方法研究[J].铁道勘察,2012,38(5):31-34
[10]腾焕乐.隧道GPS控制网横向贯通误差计算方法研究及软件研制[J].铁道勘察,2013,39(2):4-6
DataPreprocessingMethodForGeneralGPSNetworkAdjustment
XU Shuan-gan
2013-12-30
许双安(1986—),男,2011年毕业于武汉大学测绘学院,工学硕士,工程师。
1672-7479(2014)02-0049-05
P207+.2
: A
