视觉条件对舰载机着舰终端误差影响研究*
2014-07-25
91245部队 葫芦岛 125000)
视觉条件对舰载机着舰终端误差影响研究*
桑亮
91245部队 葫芦岛 125000)
针对光学助降系统易受到不良气象条件(如低能见度)影响的缺点,研究了不同视觉条件对舰载机着舰终端误差的影响。在光学着舰引导系统模型建立的基础上,对分别采用光波束惯性稳定和角稳定方案时的着舰终端误差进行了仿真对比分析。结果表明,采用惯性稳定方案时着舰终端误差较大,采用角稳定方案时着舰终端误差受视觉条件的影响较大。
光学助降系统;光波束稳定;着舰终端误差;视觉品质
ClassNumberV37
1 引言
菲涅尔透镜光学助降系统(Fresnel Lens Optical Landing System,FLOLS)是目前各国海军普遍采用的舰载机光学着舰引导系统,它能够相对于惯性空间提供一条光学下滑道,引导舰载机安全着舰。但其易受不良天气(如低能见度)的影响,从而干扰驾驶员对下滑道的跟踪。在实际工作中,由于受海浪海涌的影响,航母甲板会产生动态运动,从而使菲涅尔透镜光学助降系统发出的光波束产生波束运动。为了稳定光波束的运动,给驾驶员提供一个相对理想的下滑道,菲涅尔透镜光学助降系统通常有五种稳定方案:惯性稳定、角稳定、线稳定、点稳定和补偿“肉球”稳定。
由于篇幅所限,本文将仅比较采用惯性稳定和角稳定方案时的着舰终端误差的大小,并分别研究采用这两种稳定方案时,不同视觉条件对着舰终端误差的影响。
2 光学着舰引导系统建模
光学着舰引导系统包括助降系统控制律、下滑光波束运动方程、视觉信息环节、驾驶员环节、飞行控制系统、终端误差方程等六个部分,如图1所示[1~3]。
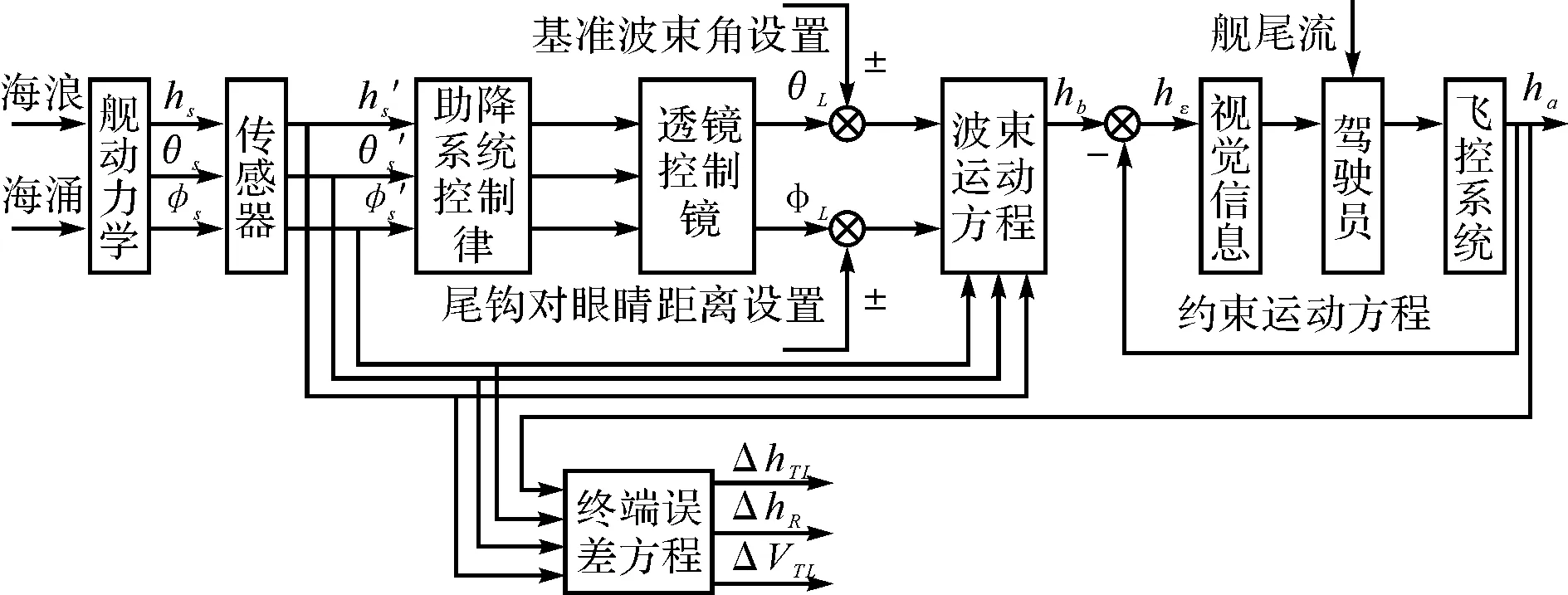
图1 光学着舰引导系统模型
下面对上述各环节进行数学建模。
2.1 驾驶员模型
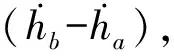

图2 跟踪飞行状态下的驾驶员模型


(1)
该模型与真实驾驶员的工作频率特性几乎一致,使用该模型,在有人驾驶下,能使任何被控飞行动力学得到稳定[5]。
2.2 视觉信息模型
由于气象条件的不利影响,驾驶员观察到的下滑轨迹偏移量(hb-ha)与实际的偏移量会不完全一致,这样的观察偏差可用模拟驾驶员视觉信息模型来描述。

图3 视觉信息模型
这里以可用的视觉信息环境UCE(Usable Cue Environment)来对视觉品质进行等级评定。视觉品质由UCE值进行量化,且二者之间成反比关系,UCE的值越大视觉品质就越差。UCE的定义方法如表1所示[6]。
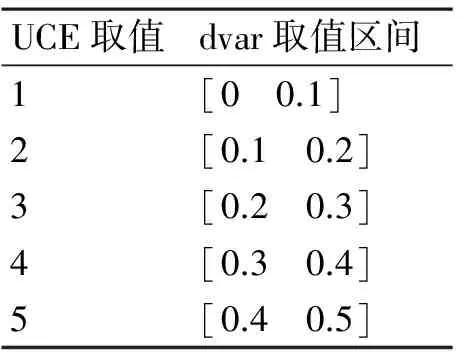
表1 UCE的定义方法
表2给出了UCE值与视觉品质的关系,并说明了不同等级视觉品质的含义。
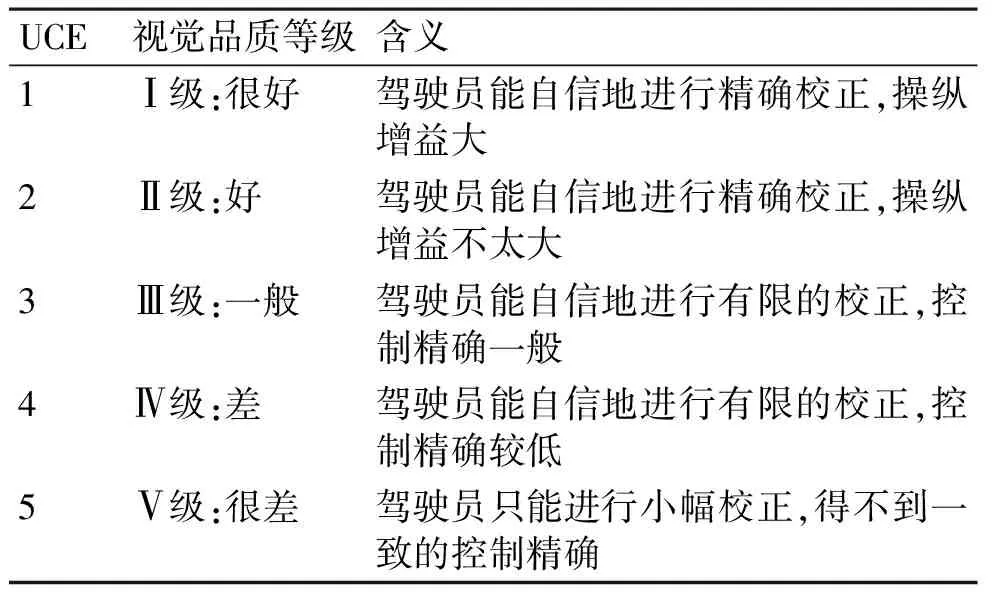
表2 视觉信息等级(UCE=1~5)的含义
视觉品质等级Ⅰ~Ⅴ所对应的模型输出误差如图4所示。从图4中可以看出,随着视觉条件的变差,驾驶员的观察误差也相应变大。
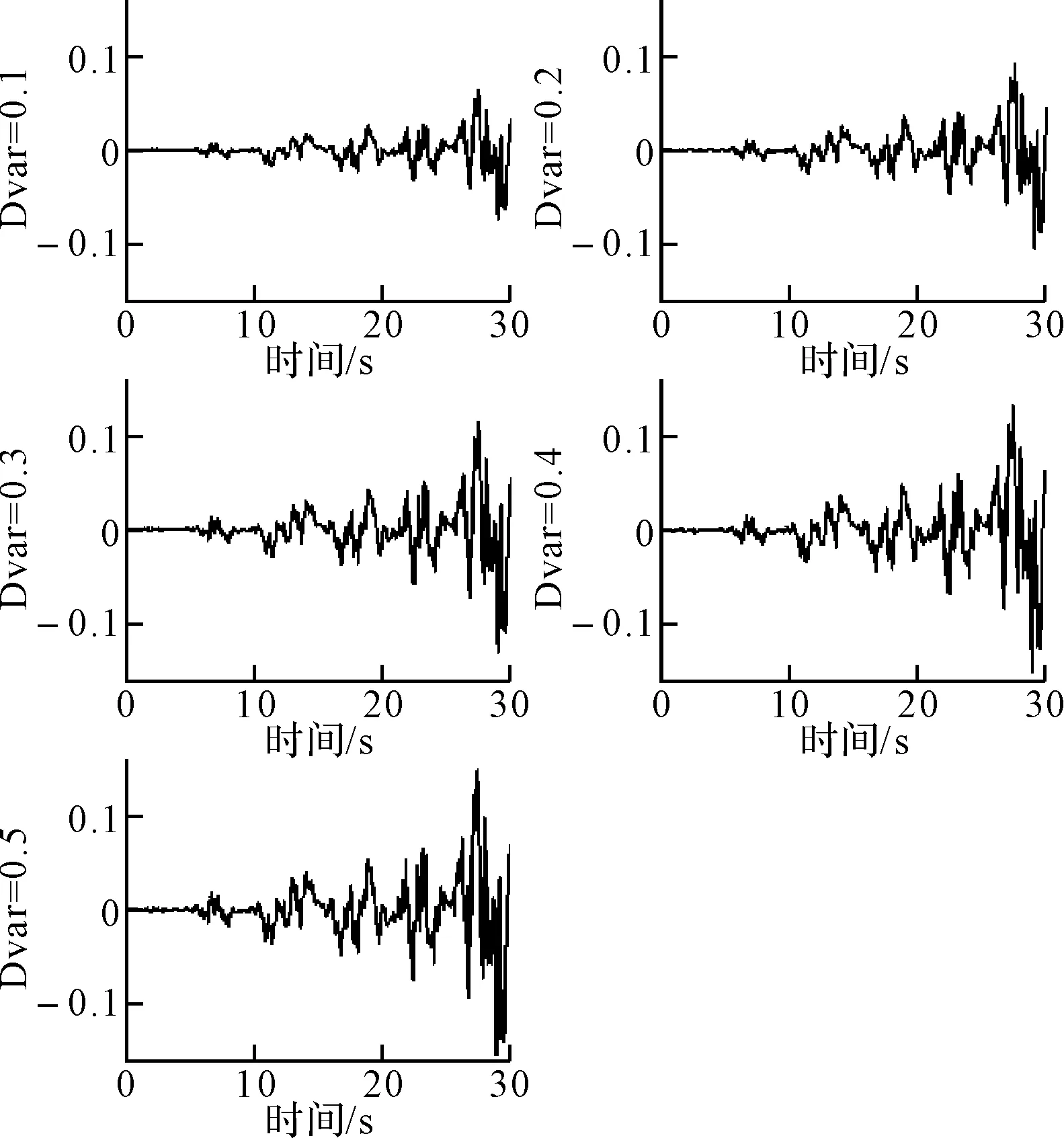
图4 视觉信息模型的输出误差
2.3 飞控系统模型
在菲涅尔透镜光学助降系统发出的下滑光波束的引导下,驾驶员通过对“肉球”指示信号的跟踪来校正飞机的下滑轨迹。此时飞机工作在反区状态下,驾驶员采取的是反区操纵技术,即以驾驶杆控制迎角,以油门调整下降速率。本文所采用的飞行控制系统模型,包括油门控制回路、发动机和自然飞机动力学,如图5所示。此模型中自然飞机动力学采用的是美国A-7E舰载机数据[6]。

图5 飞行控制系统模型
图6所示为飞行控制系统模型的阶跃响应特性仿真图,从图中可以看出此模型的响应特性比较令人满意。
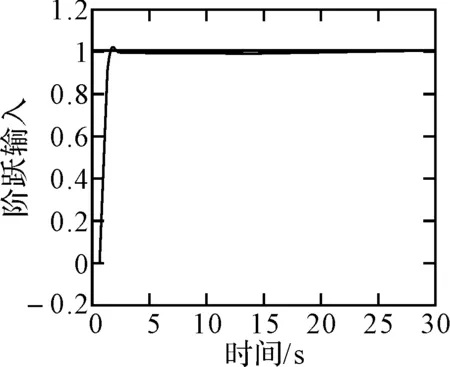
图6 飞机控制模型的阶跃响应特性
2.4 助降系统控制律
助降系统控制律[7~8]是指根据由海浪海涌引起的甲板运动hs、θs、φs,按一定规律控制光源灯指示器的俯仰θL与滚转φL,尽可能地为驾驶员提供一条理想下滑道。
采用美国ESSEX航母的几何数据可确定惯性稳定助降系统控制律:
φL(t)=-0.89θs(t)+0.90φs(t)-0.815hs(t)
θL(t)=0.98θs(t)-0.13φs(t)
(2)
角稳定助降系统控制律:
φL(t)=-4.95θs(t)+1.00φs(t)
θL(t)=0.98θs(t)-0.14φs(t)
(3)
式(2)、式(3)中φL、θL的单位为(°),hs的单位为(m)。
2.5 光波束运动
理想情况的下滑光波束是一条以航母运动速度做平移运动的光波,但是在实际情况下,由于受到海浪、海涌的影响,航母会在海面上做六自由度的运动。由于舰体的俯仰与横滚,就会使得甲板平面相对于海平面产生动态运动,从而造成下滑基准光波束产生波束运动。在不考虑稳定平台跟踪误差引起的指示误差时,可以得到下滑光波束运动的表达式为
hb=hs+LFNsinθs+YFNsinφs
(4)
其中,hs、θs、φs分别为航母在海浪、海涌作用下产生的随机的沉浮运动、俯仰运动和滚转运动,LFN为沿甲板中心线方向的光源至舰船纵摇中心的距离;YFN为沿垂直于甲板中心线方向的光源至舰船纵摇中心的距离。
由于可将航母运动视作平稳随机过程,因此可利用白噪声通过与功率谱相对应的成型滤波器的方法,得到时间域中的甲板运动信息。根据文献[9]给出的美国ESSEX航空母舰在航速为8kn时,在中心高度为17ft海涌作用下的甲板俯仰、滚转及沉浮运动的功率谱,可以得到的各成型滤波器的传递函数如下:

(5)
其中W·N为模拟海浪运动的白噪声。
为了消除甲板运动对稳定光波束的不利影响,本文采用惯性稳定和角稳定两种方案。惯性稳定方案是指保持下滑光波束在惯性空间中绝对稳定,作为正常工作中助降系统采用的首选方案,其波束运动方程为
hb(t)=0
(6)
在光波束角稳定状态下,由菲涅尔光学助降系统提供的下滑基准光波束应该与海平面成一个固定的夹角。采用文献[6]中的角稳定方案,光波束运动方程为
hb(t)=hs(t)-286θs(t)+7φs(t)
(7)
分别对惯性稳定和角稳定方案在Matlab/Simulink环境下进行仿真得到如图7所示的下滑光波束运动轨迹。
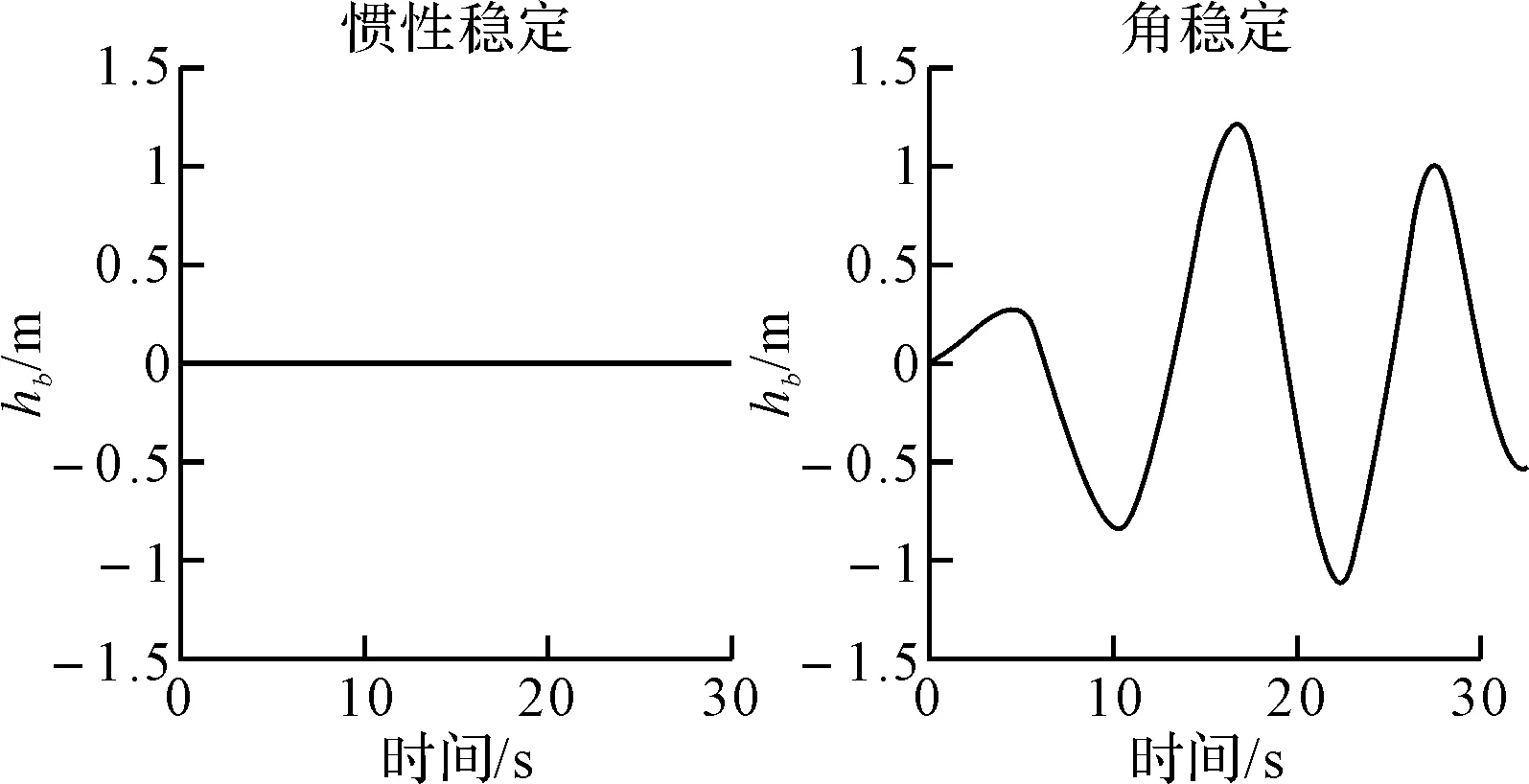
图7 下滑光波束运动hb
2.6 终端误差方程
舰载机着舰终端误差由三项组成,即飞机在理想着舰点处的高度误差ΔhTD,飞机在舰尾处的高度误差ΔhR,以及飞机在理想着舰点处的撞击速度误差ΔVTD。文献[6]给出着舰终端误差方程为
(8)
其中,haTD为飞机在理想着舰点处的实际高度,hTD为理想着舰点的高度,LTD为舰俯仰中心离着舰点的水平距离,YTD为着舰点离舰滚转轴的距离,haR为飞机在舰尾处的实际高度,UR为飞机相对于舰的相对速度,ψd为航母中间线与甲板中心线的夹角一般取ψd=11°20′。
由于haTD具有平稳随机过程的统计特性,因而可取haTD(t)的n个采样,按式(9)求出其均方根值σ(haTD)。
(9)

σ(ΔhTD)=σ(haTD)-σ(hTD)
(10)
同样可求得σ(ΔhR)和σ(ΔVTD)。
3 仿真与分析
以驾驶美国A-7E舰载机采用目视方式进行着舰为例,比较惯性稳定和角稳定两种方案下着舰终端误差的大小,并研究不同视觉条件对着舰终端误差的影响。
飞机进入着舰窗口捕获下滑道,进入下滑道的飞行高度为H0=116m,驾驶员眼睛离透镜虚像距离Rx0=1524m,飞机真空速度U0=66.4m/s,母舰前进速度Us=15m/s,自然风速W=-2.57m/s,下滑基准光波束角β0=3.5°,如图8所示。
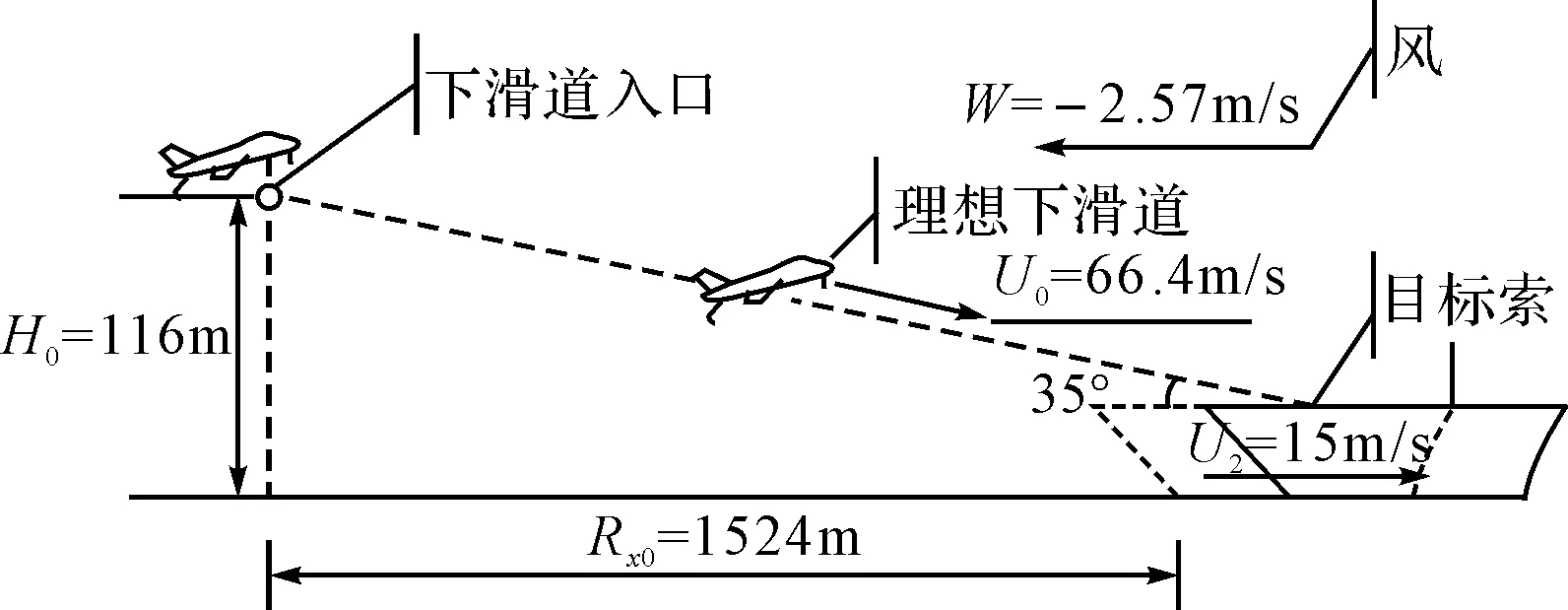
图8 舰载机下滑图
根据图1所示光学着舰引导系统模型进行仿真,可以得到视觉品质等级Ⅰ~Ⅴ级条件下,分别采用惯性稳定和角稳定方案时ha对hb的跟踪情况(如图9、图10所示)。从图中可以看出,随着视觉品质的下降驾驶员对下滑道的跟踪效果也在变差,相比较而言视觉条件对采用角稳定方案时的跟踪情况影响较大。
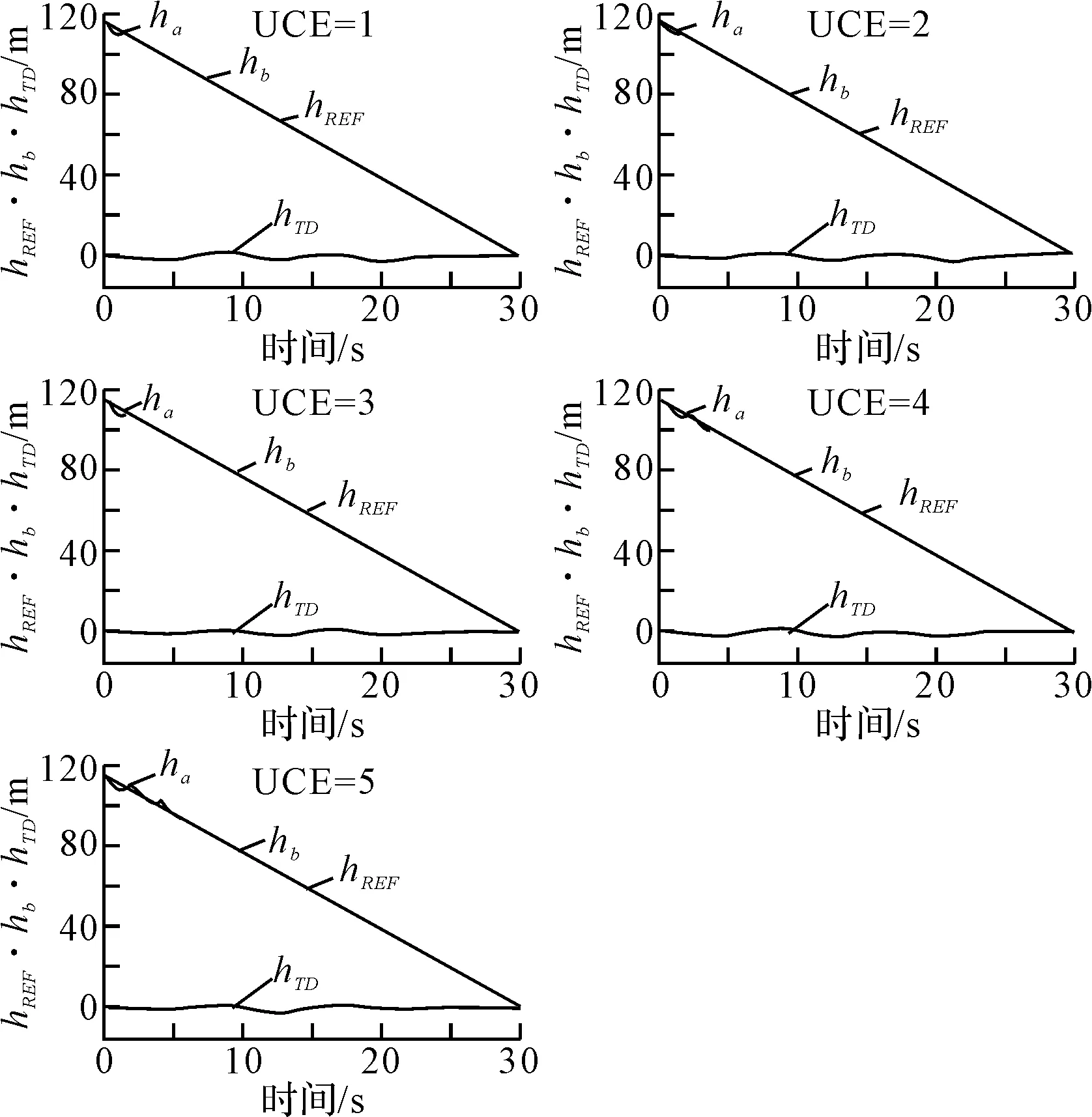
图9 惯性稳定ha对hb的跟踪
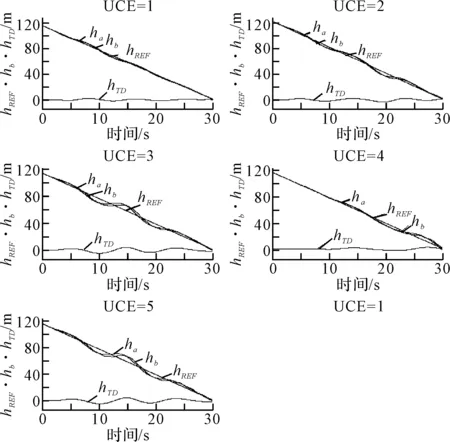
图10 角稳定ha对hb的跟踪
根据式(8)的着舰终端误差方程进行仿真计算得到表3和表4的结果。
从表格中的数据可以看出,在相同视觉条件下采用惯性稳定方案时,着舰终端误差的三项指标(ΔhTD、ΔhR、ΔVTD)均比采用角稳定方案时大。这主要是由于采用惯性稳定方案时,助降系统为驾驶员提供了相对稳定的下滑光波束,这有利于驾驶员对理想下滑道的跟踪。但是,相对稳定的下滑光波束却无法实时地反映出甲板真实的运动情况,导致着舰终端误差偏大。采用角稳定方案时,助降系统为驾驶员提供的是随着舰点而运动的下滑光波束。这虽然增加了驾驶员对理想下滑道跟踪的难度,却能够实时地反映出甲板的运动情况,在整个下滑过程中驾驶员有充足的时间来调整飞机姿态,从而减小着舰终端误差。
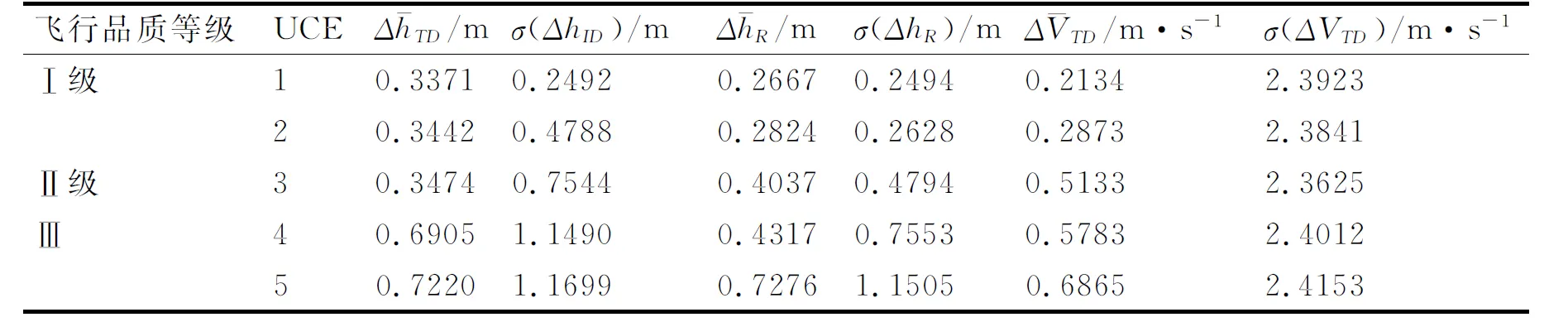
表3 采用惯性稳定方案时不同视觉条件下各误差统计特性
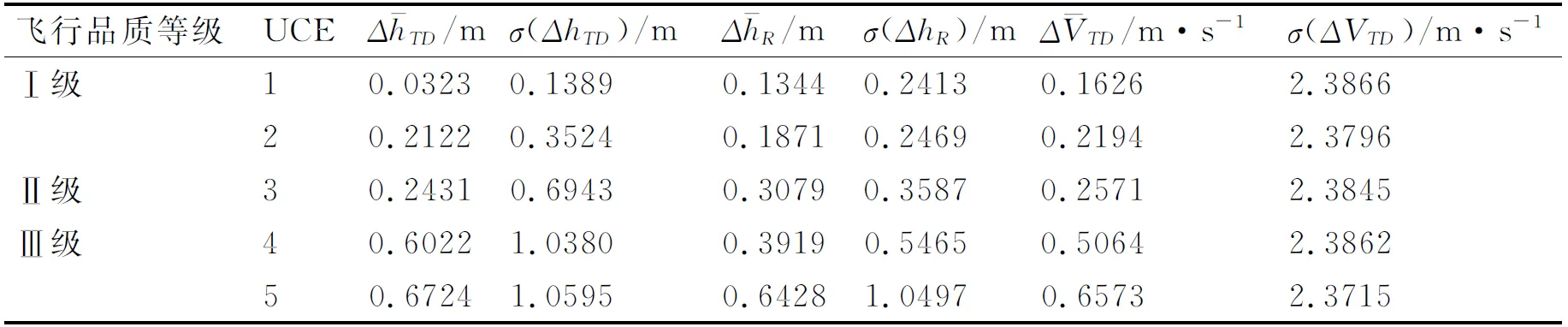
表4 采用角稳定方案时不同视觉条件下各误差统计特性
从表中的数据还可以看出,无论是采用惯性稳定方案还是角稳定方案,随着视觉条件变差终端误差也在相应地变大。但相比较而言,视觉条件对角稳定方案影响较大(误差增加的幅值较大)。这是因为,采用角稳定方案时,下滑光波束会产生波束运动,驾驶员按“肉球”指示修正下滑轨迹来跟踪下滑光波束的运动,此时驾驶员对“肉球”偏移量的观察就很容易受到视觉条件的影响。虽然表3、表4所列误差均在允许范围之内[11],着舰成功概率满足规范要求(在65%以上)[12],但是随着视觉品质的下降,驾驶员需要注意适当减小操纵增益,以获得满意的跟踪效果。
4 结语
惯性稳定方案作为光学助降系统实际工作中的首选方案,能够在惯性空间为驾驶员提供相对稳定的下滑光波束,这有利于驾驶员捕获理想下滑道,但却增加了着舰终端散布误差的幅值。采用角稳定方案可以减少着舰终端误差,但其易受视觉条件的影响,当视觉品质下降时,驾驶员应采取适当减小操纵增益的控制策略。
[1]吕雪涛.舰载机着舰引导系统安全性分析研究[D].烟台:海军航空工程学院,2011:25-26.
[2]王延刚,屈香菊.舰载机进舰着舰过程仿真建模[J].系统仿真学报,2008,20(24):6592-6598.
[3]李英杰.舰载机着舰导引特殊技术研究[D].烟台:海军航空工程学院,2005:56-58.
[4]胡兆丰.人机系统和飞行品质[M].北京:北京航空航天大学出版社,1994,1:70-74.
[5]Hess R A. A model-based theory for analyzing human control benavior[J]. JAI press Ine,1985(2):36-39.
[6]杨一栋.光学着舰助降系统[M].北京:国防工业出版社,2008,1:79-81,49-57,83-89,64.
[7]Landing Signal Officer Reference Manual[M]. U.S:Naval Landing Signal Officers School,1999:23-26.
[8]杨一栋,余俊雅.舰载飞机着舰引导与控制[M].北京:国防工业出版社,2007,3:14-18.
[9]杨一栋.舰载飞机着舰引导与控制[M].北京:国防工业出版社,2007,3:65-76.
[10]许东松,刘星宇,王立新.航母运动对舰载飞机着舰安全性的影响[J].北京航空航天大学学报,2011,37(3):289-294.
[11]杨一栋.舰载机着舰引导技术译文集[M].北京:国防工业出版社,2003,1:43-46.
ImpactofVisualConditionontheTerminalLandingError
SANG Liang
(No. 91245 Troop of PLA, Huludao 125000)
For the shortcoming that optical carrier landing guidance system is easily affected by the bad weather condition such as lew visibility, the impact of different visual conditions on carrier-based airplane terminal landing error was studied. After optical carrier landing guidance system was modeled, the terminal landing error of carrier-based airplane by using inertia stabilization scheme and angle stabilization scheme, were contrasted using Matlab/Simulink simulation. The simulation result showed that the terminal landing error was much larger when using inertia stabilization scheme, and visual condition had much more effective on angle stabilization scheme.
optical carrier landing guidance system, optical beam stabilization, terminal landing error, visual quality
2013年11月9日,
:2013年12月23日
桑亮,男,助理工程师,研究方向:通信系统工程与应用。
V37DOI:10.3969/j.issn1672-9730.2014.05.040
