Q-Max型LNG船舶靠离江苏洋口港模拟
2014-07-23刘轶华杨小军肖英杰
刘轶华,杨小军,肖英杰
(上海海事大学 商船学院,上海 201306)
0 引言
液化天然气(Liquefied Natural Gas,LNG)作为一种清洁能源,越来越受到世界各国的青睐.中国作为能源消耗大国,正在对国内以煤炭为主的能源消耗结构进行调整,LNG有逐渐取代传统能源的趋势.近十年来,随着环境污染加剧、煤炭和石油价格居高不下和天然气开采成本的下降,LNG在能源消耗中的比重在国内有很大的提高.目前中国沿海很多大中型城市乃至内陆城市都在广泛使用LNG[1],国内沿海已建立很多大型LNG接收站.江苏洋口港LNG接收站作为“西气东输”配套工程和第二气源,主要用来满足长三角地区对清洁、高效能源的需求.考虑到船舶运营成本、能耗、污染物排放和运费等因素,选择目前世界上最大的Q-Max型LNG船舶运输LNG,该船型可承载26.6万m3LNG,但该船型满载时盲区大、吃水深、干舷高,比其他船型更易受风和流影响,在靠离泊作业中存在较大风险.[2]
LNG船舶与其他危险货物船舶类似,都具有发生碰撞、搁浅、火灾、爆炸等事故的危险性.LNG船舶与其他危险货物船舶不同的是,它载运的是-162℃左右的无臭、无味、无毒、透明的LNG,主要成分是甲烷,体积仅为标准状态下气态体积的1/600.LNG具有以下危害性:可燃性、对健康的危害性、冻裂、翻滚、快速相变、沸腾液体蒸气爆炸等.因此,为满足储运和装卸作业要求,LNG船舶设计比较独特,其航行和靠离泊安全标准也比较高.LNG船舶事故统计资料表明,LNG船舶80%的风险存在于港内作业期间.[3]目前建造的 Q-Max型LNG船舶,其正横方向上受风面积超过7 500 m2,满载水线以下的吃水12 m左右,属于吃水浅、受风面积大、尺度大、传统动力推进的船舶.洋口港LNG码头前沿水域涨、落潮流速矢量主要集中在偏西、偏东方向,明显呈往复流态势.涨潮流速矢量集中在以270°为中心的240~300°方位内,落潮流速矢量集中在70~100°范围内.因此,与码头走向有较大夹角的水流环境和LNG船舶自身操纵的要求使Q-Max型LNG船舶在洋口港码头靠离泊有一定难度,存在安全隐患.因此,在LNG项目可行性研究过程中,有必要对LNG船舶的港内作业进行模拟论证,确定风险源及其相关因素,以采取相应措施规避和控制风险.[4-7]本文基于大型模拟器对Q-Max型LNG船舶靠离洋口港LNG码头进行模拟论证,通过对Q-Max型LNG船舶进行的靠离泊和应急撤离模拟演练,确定该船型船舶在港内的靠离泊作业操作方案和作业限制条件[8],保障其靠离泊安全.
1 模拟论证系统的构建
为模拟Q-Max型LNG船舶在洋口港码头的靠离泊,确定靠离泊的限制条件,基于大型船舶操纵模拟器构建3个子系统:本船子系统、环境子系统和拖船子系统.[9-10]整个系统的核心部分为本船子系统,即在满足试验精度的前提下尽量使模拟船型的操纵性能更接近实船的操纵性能.实船的基本资料见表1.
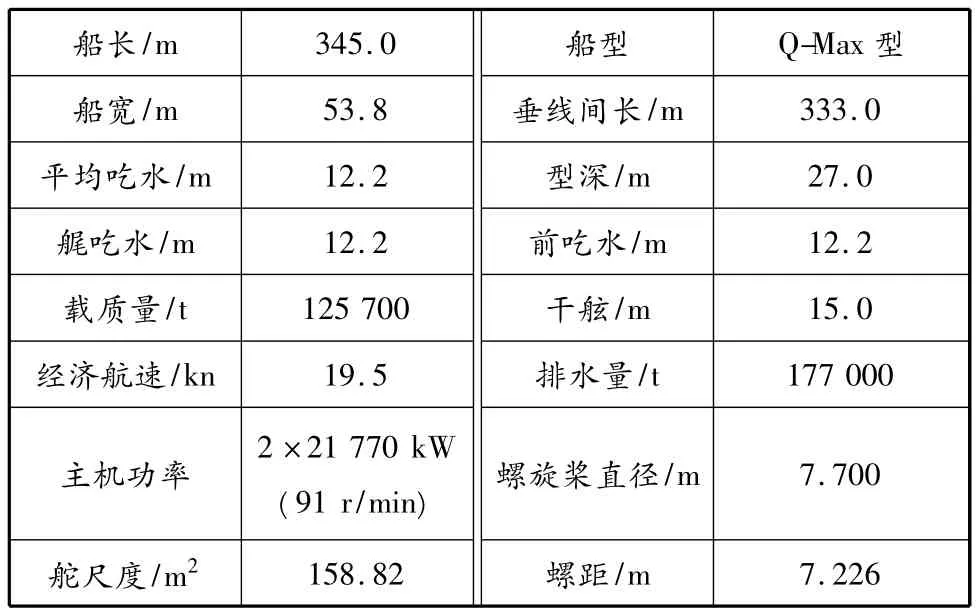
表1 26 .6万m3LNG船“MOZAH”卡塔尔王妃船基本资料
1.1 本船子系统
本船子系统最核心的是船舶操纵数学模型.建立船舶操纵数学模型的基本原理是作用在船舶上的所有力(包括惯性力)平衡,实际上也就是牛顿第二定律在船舶运动中的应用.船舶的实际运动有6个自由度,目前大部分数学模型只描述3个自由度的运动,即船舶在水平面内的纵向运动、横向运动和艏摇运动.考虑到精度和实践等因素,船舶操纵数学模型采用MMG(Mathematical Modeling Group)模型.[11-12]为描述船舶的运动,采用2个右手坐标系(见图1):一个为固定坐标系O0-x0y0z0,固定于地球;另一个为运动坐标系O-xyz,固定于船舶并随船一起运动.运动坐标系的原点O取在船舶垂心或船中剖面处,x轴为船纵轴并指向船首,y轴与纵剖面垂直并指向右舷,z轴垂直于水线面并指向龙骨.
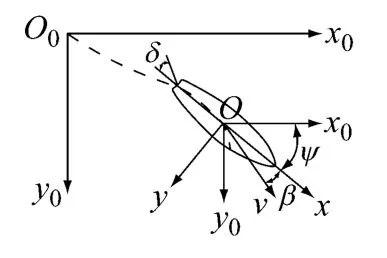
图1 船舶运动坐标系
设u和v分别为运动坐标系原点O的线速度矢量在x轴和y轴上的投影,r为船舶转动的角速度,u·,v·和r·为对应的加速度.在运动坐标系中船舶操纵运动的数学模型为


式中:m为船舶质量;Iz为船舶绕z轴的惯性矩;xG为船舶中心与坐标原点O的距离;X,Y,N分别表示船舶水流动力,惯性力,螺旋桨和舵所受的力,以及风、浪、流等的作用力在运动坐标系3个方向上的分量.
忽略上述方程中影响不大的项,合并惯性力项,并把各种力写成分量形式,近似有

式中:mx和my为船体附连质量;Jz为船体惯性矩;下标WD,WV,C分别表示风、浪、流;下标P和R分别表示螺旋桨和舵;XH,YH,NH为不包括惯性力项的船体水动力.
船舶所受到的水动力不仅依赖于船体形状、舵角和推进装置,也与水深、船舶吃水、纵倾及限制性水域有关.计算船舶水动力时所用的水动力导数根据已总结出的经验公式计算.
船舶受到的风动力计算公式为

风动力在正横方向上的投影为

风动压力角为

式(7) ~(9)中:ρa为空气密度,取 1.226 kg/m3;Ca为风动力因数,由风舷角确定,见表2;Aa为水线上船体受风正面积,m2;Ba为水线上船体受风侧面积,m2;va为相对风速,m/s.风速很小时,va取平均风速;强风(大于6级)时,va取平均风速的1.25倍;暴风(大于8级)时,va取平均风速的1.5倍.

表2 Q-Max型LNG船舶风动力因数
船舶横流阻力计算公式为

式中:ρw为水的密度,取1 025 kg/m3;Cw为水动力因数,由漂角和水深吃水比确定,见表3;Bw为水线下船体侧面积,m2;vw为水的流速,m/s.

表3 横流水动力因数
许多环境因素对船舶的操纵运动有明显的影响,其中最重要的因素有风、浪、流、水深、航道岩壁、船与船的相互作用等.螺旋桨和舵是控制船舶的主要因素,拖船的协助作用也很重要.为验证船舶数学模型的精度,分别进行船舶性能模拟测试和拖船模拟测试,结合Q-Max型LNG船舶海试资料和拖船拖拉试验数据,确定相关船舶响应参数,保证系统满足模拟论证精度要求.
1.2 环境子系统
环境子系统主要由风、浪、流等水文气象要素组成,根据试验的工况进行设置.
1.3 拖船子系统
根据Q-Max型LNG船舶靠离泊所需拖船的基本配置[13],在拖船子系统中挑选2种全回转拖船,即5 000 HP拖船和6 000 HP拖船(1 HP≈735.499 W),拖船的资料见表4.

表4 拖船资料
2 船舶靠离洋口港模拟试验
2.1 江苏洋口港LNG接收站码头简介
江苏洋口港LNG接收站位于如东县海滨辐射沙洲中的烂沙洋水道西部西太阳沙,码头为蝶形,长度为430 m,平面布置见图2.码头前沿天然泥面标高约-17.0 m,港池水域天然泥面标高 -18~-15.0 m,码头前沿走向为 279°/099°.码头为对称布置,中部为45 m×23 m的工作平台,平台上布置有操作平台支持系统、登船梯、控制室、靠泊辅助系统等设施.工作平台两侧共布置4个靠船墩和6个系缆墩,各部分之间通过人行钢桥连接,桥宽为4 m.
2.2 试验流程
为筛选出风险较高的靠离泊条件,通过图3所示的试验流程进行模拟.考虑到一般情况下LNG船舶进港靠泊码头的难度大于离泊出港的难度,以Q-Max型LNG船舶进港靠泊为例进行模拟试验,离泊和应急撤离的模拟操纵过程类似.
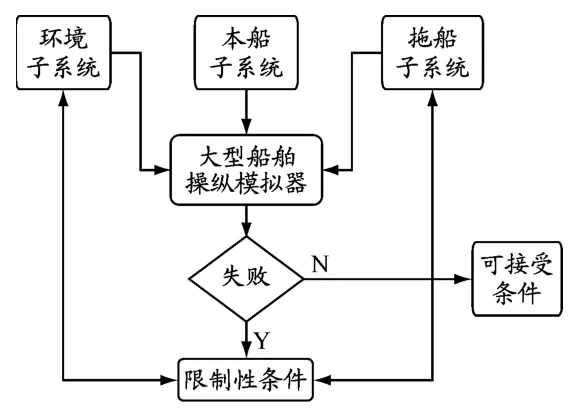
图3 模拟试验流程
为使模拟试验操纵方式和方法尽量符合操纵实际和习惯,去深圳大鹏湾LNG基地进行调研考察,并对LNG船舶实际靠离泊操作进行实时跟踪和数据采集.[14-15]大型LNG船舶实际靠泊作业一般采用“3+1”的模式:1艘拖船配置在船尾用来降速,同时也可控制船首的偏转,以应对主机失控带来的风险;3艘拖船用于船舶的左右舷进行助操.拖船的配置位置见图4.
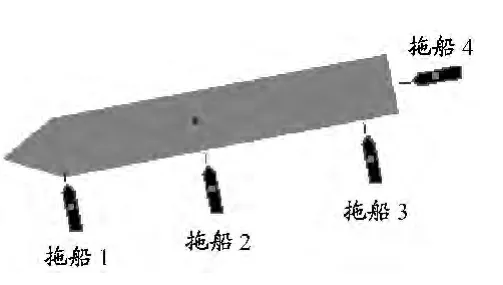
图4 拖船助操配置示意
2.3 试验实施及数据分析
根据洋口港的自然条件,结合码头前沿和航道的实测流资料,按照LNG船舶靠离泊作业条件标准[16](见表5),确定靠离泊试验工况:靠泊工况216个、离泊工况108个、应急撤离工况108个,共计工况432个.部分试验工况见表6.

表5 LNG船舶靠离泊作业条件标准

表6 在不同拖船配置助操情况下LNG船舶靠泊试验工况和结果(波浪)
首先使用4艘5 000 HP拖船助操进行模拟试验,在初次模拟的基础上确定船舶靠泊较为困难的工况再进行多次模拟.对被确认为靠泊困难的工况,将2艘5 000 HP拖船替换为2艘6 000 HP的拖船,再进行模拟试验,如此循环逐渐缩小模拟试验范围,筛选风险较大的靠离泊工况,并在此基础上确定靠离泊的限制条件,规避恶劣工况下LNG船舶靠离泊作业风险.[17]
上述模拟试验表明,4艘5 000 HP拖船配置可满足常规工况下Q-Max型LNG船舶安全靠离泊的要求,但拖船的剩余功率很小(见图5).在东北风和东南风、涨潮流和落急流时,模拟靠泊作业有可能失败,特别是在受到极限风、浪、流影响时,船舶靠泊作业风险较大,在模拟靠泊过程中曾出现船舶碰撞码头的情况.4艘5 000 HP拖船配置不能满足稍恶劣工况下的安全靠泊要求.
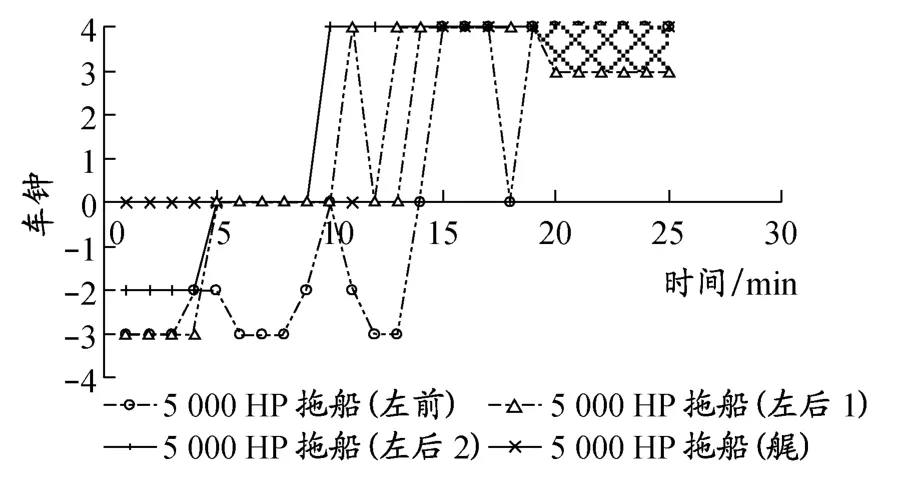
图5 4艘5 000 HP拖船助操时拖船用车序列
对上述试验中存在风险的工况用2×5 000 HP+2×6 000 HP拖船配置再次进行模拟试验.试验结果表明,除在东南风涨潮流速3.0 kn的情况下,船舶模拟靠泊作业仍存在较大的风险外,以上拖船配置可满足正常情况下Q-Max型LNG船舶安全靠泊的要求,拖船功率有一定的富余(见图6).

图6 2艘5 000 HP和2艘6 000 HP拖船助操时拖船用车序列
按照以上的模拟试验程序,分别进行离泊和应急撤离的模拟试验,在所有离泊和应急撤离的试验中,也存在东南风涨潮流速3.0 kn时,船舶在掉头区的航迹过分靠近回旋水域的边界的情况,但基本可满足安全作业的需要.
3 靠离泊限制条件的确定
根据模拟试验结果:在4艘5 000 HP拖船的协助下,Q-Max型LNG船舶在东南风6级且涨潮流速3.0 kn的条件下靠离洋口港LNG接收站码头存在很高的风险,在南风6级且落潮流速3.7 kn时风险次之、在东南风6级且涨潮流速2.0 kn时风险再次之;在2艘5 000 HP和2艘6 000 HP拖船的协助下,Q-Max型LNG船舶在东南风6级且涨潮流速3.0 kn的条件下存在很高的风险,在其他情况下的有限次试验中鲜有失败的例子,但是靠离码头的时间仍然比较长,不利于LNG船舶靠离泊作业的风险控制(见表7).

表7 Q-Max型LNG船舶靠泊模拟试验数据对比分析
Q-Max型LNG船舶靠离洋口港的风险主要存在于当风、流作用力同向时,由于码头前沿水域的涨落潮基本是往复流,且均为吹开流,LNG船舶一般横向受风面积较大,因此在靠离泊过程中要充分认识到风,特别是风向,对靠离泊的影响.
在风速一定的前提下,风的作用力与吹开流叠加增强后对船舶靠离泊作业主要存在以下影响:增加LNG船舶靠离泊难度和靠离泊作业时间.由于LNG船舶靠离泊作业还涉及其他岸上部门的协作,过长的靠离泊过程本身就会增加系统的风险.[18]因此,船舶靠离泊作业限制条件应规避模拟失败或耗时过长的工况,以策安全.
4 结论
Q-Max型LNG船舶靠离江苏洋口港在特定的条件下是存在风险的,4艘5 000 HP拖船对于该船型来说略显不足,2×5 000 HP+2×6 000 HP拖船配置可以胜任绝大部分的工况.若经济上可行,适当增加拖船配置的总功率是减小风险的有效方法.另一方面,在不增加拖船配置总功率的情况下,也可借助试验确定的极限工况作为靠离泊限制条件以规避风险.当然模拟试验也存在局限性,比如不能真实反映驾引人员的心理负担等,故在实际的船舶操作中应留有适当的余地.
本文只是试图从航海的角度基于船舶操纵模拟器评价Q-Max型LNG船舶的靠离泊风险,为洋口港LNG码头靠离泊作业的限制条件和拖船配置提供参考.下一步的研究方向是与船舶液货操作模拟相结合,整体评价LNG船舶在港内的作业风险.
[1]张位平.中国发展液化天然气面临的机遇和挑战[J].中外能源,2009,14(6):1-22.
[2]SCHEIBACH K,NOBLE P,BROMAN C.The next generation of large LNG carriers[C].Proc 9th Int Marine Design Conf,2006:1328-1344.
[3]张文海.LNG船历史事故研究[J].船舶,2011,22(4):1-5.
[4]祁超忠.LNG船舶港内作业前期研究及风险防范[J].航海技术,2008(6):2-5.
[5]SIGTTO.Liquefied gas handling principles on ships and in terminals[M].3rd ed.UK:Witherbys,1999:1-26.
[6]VANEM E,ANTÃO P,ØSTVIK I,et al.Analysing the risk of LNG carrier operations[J].Reliability Eng & Syst Safety,2008,93(9):1328-1344.
[7]SOARES C G,TEIXEIRA A P.Risk assessment in maritime transportation[J].Reliability Eng& Syst Safety,2001,74(3):299-309.
[8]肖英杰.中国石油江苏LNG项目Q-Max型LNG船舶模拟试验[R].上海:上海海事大学,2010:80-81.
[9]关克平,王胜正,陈锦标,等.一种新的生成航海模拟器视景地形数据库文件的方法[J].上海海运学院学报,2003,24(3):213-216.
[10]周世波,熊振南.湄洲湾LNG船舶监管方案仿真系统设计与实现[J].上海海事大学学报,2009,30(4):52-56.
[11]熊振南,周世波.船舶航行环境可视化仿真[J].上海海事大学学报,2009,30(1):6-9.
[12]黄志,翁跃宗,熊振南.液化天然气专用码头系泊安全操作仿真研究[J].航海技术,2006(4):66-68.
[13]JTS 165—2013,海港总平面设计规范[S].
[14]孙永平,胡伟忠,江建忠.LNG船舶首航深圳港的安全引航[J].航海技术,2007(1):6-8.
[15]LAO Chunhao,SHEN Hua,CHEN Zhiyong.The risk analysis of navigation safety for the LNG carrier in Shenzhen Port[J].大连海事大学学报,2007,33(S2):59-62.
[16]JTS 165-5—2009,液化天然气码头设计规范[S].
[17]肖英杰.江苏洋口港LNG项目接收站码头配套拖船模拟试验报告[R].上海:上海海事大学,2010.
[18]张浩,刘轶华.液化天然气船舶运输安全和效率评价及交通组织优化研究[R].上海:上海海事大学,2012.
